Download as pdf or txt
You might also like
- Zestaw Przykł EGZAMINACYJNY Algebra INF PoprDocument2 pagesZestaw Przykł EGZAMINACYJNY Algebra INF PoprAdam JanNo ratings yet
- Algorytmy Znajdowania Baz - 1Document7 pagesAlgorytmy Znajdowania Baz - 1mppjuroNo ratings yet
- Sean: 0 0 1 0 0 1 1 1Document1 pageSean: 0 0 1 0 0 1 1 1rodrigo.negriiNo ratings yet
- 16 - Diffusion RayleighDocument1 page16 - Diffusion RayleighlkmkmlkNo ratings yet
- PODSTAWY AUTOMATYKI Lab2Document4 pagesPODSTAWY AUTOMATYKI Lab2pledzwon123No ratings yet
- 3 SsoDocument13 pages3 SsoShadoł XIIINo ratings yet
- Procedura Zadania Prostego KinematykiDocument3 pagesProcedura Zadania Prostego KinematykiAdrian KozieńNo ratings yet
- Projekt1 Glegoła 200811Document9 pagesProjekt1 Glegoła 200811Dominik GlegołaNo ratings yet
- Macierze Przekształceń StudDocument3 pagesMacierze Przekształceń StudLol LolNo ratings yet
- 09 KrzywaDocument5 pages09 KrzywaZbigniew WątrobaNo ratings yet
- SprawozdanieDocument10 pagesSprawozdanieczapska.studentNo ratings yet
- Belka Timoshenko Na Sprężystym Podłożu Chodor-ProjektDocument13 pagesBelka Timoshenko Na Sprężystym Podłożu Chodor-ProjektDawid GabrysiakNo ratings yet
- Wyk 13 HandDocument11 pagesWyk 13 HandjemenNo ratings yet
- Iter JakobiDocument2 pagesIter JakobiKarolina JanikNo ratings yet
- Kinematyka DodatkiDocument17 pagesKinematyka DodatkiZuzia JagielskaNo ratings yet
- LAB03Document2 pagesLAB03Piotr SkokNo ratings yet
- ProsteDocument2 pagesProsteEmma CichockaNo ratings yet
- Siec HopfieldaDocument10 pagesSiec HopfieldaAnton BranouskiNo ratings yet
- Wykps1 1Document39 pagesWykps1 1kasia rządkowskaNo ratings yet
- Sieczna Okregu Na Plaszczyznie KartezjanskiejDocument18 pagesSieczna Okregu Na Plaszczyznie Kartezjanskiejkar05No ratings yet
- LPP II ĆW 7 8 Układy Cyfrowe TTL CMOSDocument22 pagesLPP II ĆW 7 8 Układy Cyfrowe TTL CMOSRugri EsNo ratings yet
- Lab 04Document3 pagesLab 04api-19660531No ratings yet
- cw3 Instrukcja Laboratoryjna Inf VGXdZP5AP6Document16 pagescw3 Instrukcja Laboratoryjna Inf VGXdZP5AP6DanielNo ratings yet
- Ilovepdf MergedDocument4 pagesIlovepdf Mergedyessica lopez100% (1)
- Metoda NewmarkaDocument6 pagesMetoda Newmarkamateusz mateuszNo ratings yet
- Granice Pewnych Funkcji SpecjalnychDocument5 pagesGranice Pewnych Funkcji SpecjalnychFelicja warnoNo ratings yet
- Okresowosc Funkcji Trygonometrycznych Oraz Jej ZastosowaniaDocument25 pagesOkresowosc Funkcji Trygonometrycznych Oraz Jej Zastosowaniavevoj60285No ratings yet
- Examens National 2bac Science Math 2012 NDocument10 pagesExamens National 2bac Science Math 2012 NFatima ZdNo ratings yet
- 29-Prad Zmienny 2Document6 pages29-Prad Zmienny 2Bartosz ZamorskiNo ratings yet
- Wzory StatystyczneDocument10 pagesWzory StatystyczneАня КербедьNo ratings yet
- Drgania FaleDocument14 pagesDrgania FaleelotuelitkaNo ratings yet
- Instrukcja Do Ćwiczenia E1Document6 pagesInstrukcja Do Ćwiczenia E1qvertyplaygamesNo ratings yet
- W M1-Kryst 03Document4 pagesW M1-Kryst 03vee.fortesqueNo ratings yet
- Wyklad Kalisz RRozniczkoweDocument21 pagesWyklad Kalisz RRozniczkoweJan KowalskiNo ratings yet
- PD Analiza2r 1Document8 pagesPD Analiza2r 1julianresko123No ratings yet
- Prosta I PlaszczyznaDocument16 pagesProsta I Plaszczyznareaktywacja654No ratings yet
- Zastosowanie Fizyczne CałekDocument2 pagesZastosowanie Fizyczne CałekMikeNo ratings yet
- Bramki LogiczneDocument13 pagesBramki Logiczneapi-3704403No ratings yet
- Wyznaczanie Przemieszczen Przyklad 3Document7 pagesWyznaczanie Przemieszczen Przyklad 3Florian MarzecNo ratings yet
- Statecznosc Wzory TransformacyjneDocument2 pagesStatecznosc Wzory Transformacyjnejoe zephNo ratings yet
- Wykład 3 - Różniczkowalność Funkcji I Różniczka Funkcji Dwóch ZmiennychDocument4 pagesWykład 3 - Różniczkowalność Funkcji I Różniczka Funkcji Dwóch ZmiennychBalto FarlanderNo ratings yet
- MES1 Notatki Do Wykładów Czesc 2Document33 pagesMES1 Notatki Do Wykładów Czesc 2K9GNo ratings yet
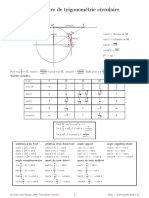
- For Mulaire TrigoDocument2 pagesFor Mulaire Trigojosephandy581No ratings yet
- Sprawozdanie 6 FizykaDocument9 pagesSprawozdanie 6 FizykaoliwiaskaNo ratings yet
- 3 Rozklad JednostajnyDocument1 page3 Rozklad Jednostajnyadam.szafranskijdNo ratings yet
- Automatyka - Sosnowski, Przerzutniki PDFDocument20 pagesAutomatyka - Sosnowski, Przerzutniki PDFlolopolo2No ratings yet
- Lab 1 Szeregi TayloraDocument2 pagesLab 1 Szeregi Tayloratomo222222No ratings yet
- Twierdzenie o Prostej ProstopadlDocument22 pagesTwierdzenie o Prostej Prostopadlanglistykauwr2020.2No ratings yet
- Dynamika - Zintegrowana Platforma EdukacyjnaDocument5 pagesDynamika - Zintegrowana Platforma EdukacyjnaSinnapplet CreatorNo ratings yet
- Wyklad 2Document24 pagesWyklad 2MaxNo ratings yet
- Najważniejsze Wzory:: Z) M I Z Y, Z) M I Z M I yDocument26 pagesNajważniejsze Wzory:: Z) M I Z Y, Z) M I Z M I yAnia MierzejewskaNo ratings yet
- W3 5 Zapis Orientacji 6 Pomiar PolozeniaDocument43 pagesW3 5 Zapis Orientacji 6 Pomiar PolozeniaPiotr SkokNo ratings yet
- Zadania Do Samodzielnego Wykonania - Seria IDocument100 pagesZadania Do Samodzielnego Wykonania - Seria IwykladmechanikaplynowNo ratings yet
- Modele LogitoweDocument11 pagesModele LogitowePiotr ParulskiNo ratings yet
- Wykład 2 - Pochodne Funkcji Wielu ZmiennychDocument5 pagesWykład 2 - Pochodne Funkcji Wielu ZmiennychBalto FarlanderNo ratings yet
- Wykładniczy Model TrenduDocument22 pagesWykładniczy Model TrenduwojtylaNo ratings yet
- Final 22Document3 pagesFinal 22barcis06No ratings yet
- Dobór Zmiennych Objaśniajacych 2018-Lic.Document19 pagesDobór Zmiennych Objaśniajacych 2018-Lic.Adam MarekNo ratings yet
- Prostaonline PDFDocument12 pagesProstaonline PDFUsus HsjsuNo ratings yet
- Wniosek o Zakup Preferencyjny Węgla-2Document1 pageWniosek o Zakup Preferencyjny Węgla-2Adam JanNo ratings yet
- Waga Precyzyjna Z Szafka Przecipodmuchowa Sbs LW 200a LCD Dokl 0 001g Do 200gDocument2 pagesWaga Precyzyjna Z Szafka Przecipodmuchowa Sbs LW 200a LCD Dokl 0 001g Do 200gAdam JanNo ratings yet
- Zestaw Przykł EGZAMINACYJNY Analiza INFDocument2 pagesZestaw Przykł EGZAMINACYJNY Analiza INFAdam JanNo ratings yet
- ITIL4F Sylabus Glosariusz Egzamin PDFDocument101 pagesITIL4F Sylabus Glosariusz Egzamin PDFIzabelaNo ratings yet
- RFC MF Cennik Światłowodowy Promo OFERTA OGÓLNA Scalone Nowy 5Document4 pagesRFC MF Cennik Światłowodowy Promo OFERTA OGÓLNA Scalone Nowy 5MabartiNo ratings yet
- ETA-13 - 0198 PROMAPAINT® SC4 Powłoka Reaktywna Do Zabezpieczeń Ogniochronnych Elementów StalowychDocument33 pagesETA-13 - 0198 PROMAPAINT® SC4 Powłoka Reaktywna Do Zabezpieczeń Ogniochronnych Elementów StalowychPiotr ZielińskiNo ratings yet
- NG4 AktualizacjaDocument2 pagesNG4 Aktualizacjamariusz.berk100% (1)
- DyskDocument3 pagesDyskPoisondartNo ratings yet