Download as pdf or txt
You might also like
- 5.service Manual of AGSS PDS EnglishDocument39 pages5.service Manual of AGSS PDS Englishahmed67% (3)
- 01-0-PPT Introduction To Mobile RoboticsDocument49 pages01-0-PPT Introduction To Mobile RoboticsHasrulnizam HashimNo ratings yet
- 1 NS4000 4100 ECDIS Functional Description Eng (035-095) PDFDocument61 pages1 NS4000 4100 ECDIS Functional Description Eng (035-095) PDFYes YesyesNo ratings yet
- A Seaman's Guide To Basic Chartwork PDFDocument313 pagesA Seaman's Guide To Basic Chartwork PDFmouloud miloudNo ratings yet
- Automation of LHD MachinesDocument56 pagesAutomation of LHD Machinesalberto_barrosoNo ratings yet
- Journal Paper Fin 1Document3 pagesJournal Paper Fin 1Palanisamy RNo ratings yet
- Navigation SystemDocument22 pagesNavigation System19MCE24 Poovendhan VNo ratings yet
- .Vehicle Tracking With Geo Fencing On Android PlatformDocument4 pages.Vehicle Tracking With Geo Fencing On Android PlatformHakiem HalimNo ratings yet
- Predicting The Bus Arrival Time Using GPS and GSM TechnologyDocument5 pagesPredicting The Bus Arrival Time Using GPS and GSM TechnologyVeronica FloresNo ratings yet
- Reference PaperDocument6 pagesReference PaperPratibha VermaNo ratings yet
- Amateur: Augmented Reality Based Vehicle Navigation System: Chu Cao, Zhenjiang Li, Pengfei Zhou, Mo LiDocument24 pagesAmateur: Augmented Reality Based Vehicle Navigation System: Chu Cao, Zhenjiang Li, Pengfei Zhou, Mo LiNaveen Gowdru ChannappaNo ratings yet
- Ext 37509Document4 pagesExt 37509Mathan AshNo ratings yet
- Waypoint Navigation SystemDocument7 pagesWaypoint Navigation SystemShaukat WazirNo ratings yet
- Pavi Tra 2017Document5 pagesPavi Tra 2017snehal salaveNo ratings yet
- (Doi 10.1109/ITST.2007.4295849) Thong, Stephen Teang Soo Han, Chua Tien Rahman, Tharek Abdul - (IEEE 2007 7th International Conference On ITS Telecommunications - Sophia AntipolisDocument6 pages(Doi 10.1109/ITST.2007.4295849) Thong, Stephen Teang Soo Han, Chua Tien Rahman, Tharek Abdul - (IEEE 2007 7th International Conference On ITS Telecommunications - Sophia AntipolisganeshNo ratings yet
- Christopoulos Et Al. - 2019 - Learning Driver Braking Behavior Using SmartphonesDocument11 pagesChristopoulos Et Al. - 2019 - Learning Driver Braking Behavior Using SmartphonesN'GOLO MAMADOU KONENo ratings yet
- Bus Tracking System and Ticket Generation Using QR Technology PDFDocument5 pagesBus Tracking System and Ticket Generation Using QR Technology PDFResearch Journal of Engineering Technology and Medical Sciences (RJETM)No ratings yet
- Iaetsd Vehicle Monitoring and Security SystemDocument3 pagesIaetsd Vehicle Monitoring and Security SystemiaetsdiaetsdNo ratings yet
- IOT Based Real-Time Vehicle Tracking SystemDocument6 pagesIOT Based Real-Time Vehicle Tracking SystemPavan VNo ratings yet
- Changle Li 2021Document15 pagesChangle Li 2021Dung NguyễnNo ratings yet
- Vehicle Tracking System Using GPS and Android OSDocument5 pagesVehicle Tracking System Using GPS and Android OSshobanraj1995No ratings yet
- GPS Based Low Cost Intelligent Vehicle Tracking System (IVTS)Document5 pagesGPS Based Low Cost Intelligent Vehicle Tracking System (IVTS)Kiran KumarNo ratings yet
- High Definition Map-Based Localization Using ADASDocument11 pagesHigh Definition Map-Based Localization Using ADASravichoprascribdNo ratings yet
- Research On The Integrity Monitoring of GPS Vehicle SystemDocument4 pagesResearch On The Integrity Monitoring of GPS Vehicle SystemfranzkilaNo ratings yet
- Vehicle Tracking System Using GPS-GSM Accident Detection and Theft SecurityDocument8 pagesVehicle Tracking System Using GPS-GSM Accident Detection and Theft Securitybrryyyt.29No ratings yet
- Automated Bus Stop Alert For Passengers Using GPS: Vijetha Tummala, S.Akshay Kumar, P.Srinivas, G.SravanDocument2 pagesAutomated Bus Stop Alert For Passengers Using GPS: Vijetha Tummala, S.Akshay Kumar, P.Srinivas, G.SravanerpublicationNo ratings yet
- Irjet Automatic Railway Track Crack DeteDocument5 pagesIrjet Automatic Railway Track Crack DeteSharukNo ratings yet
- Mechanization and Error Analysis of Aiding Systems in Civilian and Military Vehicle Navigation Using Matlab SoftwareDocument17 pagesMechanization and Error Analysis of Aiding Systems in Civilian and Military Vehicle Navigation Using Matlab SoftwareijctcmjournalNo ratings yet
- Gps Project ReportDocument82 pagesGps Project Reportgsrawat123No ratings yet
- Automation and Localization of A Robotic Car - UFMGDocument7 pagesAutomation and Localization of A Robotic Car - UFMGEdson KitaniNo ratings yet
- Formula Student Racing Championship: Design and Implementation of An Automatic Localization and Trajectory Tracking SystemDocument11 pagesFormula Student Racing Championship: Design and Implementation of An Automatic Localization and Trajectory Tracking Systemfildi95No ratings yet
- Calculating The Speed of Vehicles Using Wireless Sensor NetworksDocument5 pagesCalculating The Speed of Vehicles Using Wireless Sensor NetworksHayderNo ratings yet
- Verification of Smart Guiding System To Search For Parking Space Via DSRC CommunicationDocument5 pagesVerification of Smart Guiding System To Search For Parking Space Via DSRC CommunicationSanthana KrishnanNo ratings yet
- Paper Mobile Hci 2010Document2 pagesPaper Mobile Hci 2010Air WalkietalkieNo ratings yet
- Low Cost GPS LocationsDocument6 pagesLow Cost GPS Locationseko_suwarsono100% (1)
- Savant MDR Paper FinalDocument9 pagesSavant MDR Paper FinalNikhil DixitNo ratings yet
- Mobile Phone Detection and Notification For The Prevention of Car AccidentsDocument9 pagesMobile Phone Detection and Notification For The Prevention of Car AccidentsIJRASETPublicationsNo ratings yet
- Improving Railway Safety With Obstacle Detection and Tracking System Using GPS-GSM ModelDocument7 pagesImproving Railway Safety With Obstacle Detection and Tracking System Using GPS-GSM ModelFìrœ Lōv MånNo ratings yet
- Road Hazard Detection and Sharing With Multimodal Sensor Analysis On SmartphonesDocument6 pagesRoad Hazard Detection and Sharing With Multimodal Sensor Analysis On Smartphonesbmw 2018No ratings yet
- Vehicle Monitoring and Security SystemDocument5 pagesVehicle Monitoring and Security SystemKavin Mahesh KavinNo ratings yet
- ICAICTA.2016.7803080 VTDDocument6 pagesICAICTA.2016.7803080 VTDMd SazzadNo ratings yet
- 6 - Lane Recognition Technique Using Hough TransformDocument6 pages6 - Lane Recognition Technique Using Hough TransformDr. Dnyaneshwar KirangeNo ratings yet
- Alacrity Control Using CateyeDocument5 pagesAlacrity Control Using CateyeRega RmsNo ratings yet
- IJETR031410Document6 pagesIJETR031410erpublicationNo ratings yet
- Intelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyDocument15 pagesIntelligent Vehicle Control Using Wireless Embedded System in Transportation System Based On GSM and GPS TechnologyJubin JainNo ratings yet
- An Automated Approach To Driving Assistance and Accident DetectionDocument3 pagesAn Automated Approach To Driving Assistance and Accident DetectionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Vehicle LocatorDocument7 pagesAutomatic Vehicle LocatorYogesh YadavNo ratings yet
- Real Time Vehicle Tracking Using ArduinoDocument4 pagesReal Time Vehicle Tracking Using ArduinoBill CheimarasNo ratings yet
- Deep Learning Based Vehicle Speed Estimation On HighwaysDocument11 pagesDeep Learning Based Vehicle Speed Estimation On HighwaysHien TranNo ratings yet
- Real Tie M Gps Gprs Based Vehicle Tracking SystemDocument6 pagesReal Tie M Gps Gprs Based Vehicle Tracking SystemSruthi ReddyNo ratings yet
- "Intelligent Navigation Systems": Aftab ZiyaDocument37 pages"Intelligent Navigation Systems": Aftab ZiyaPraveen HalladmaniNo ratings yet
- Autonomous VehiclesDocument15 pagesAutonomous VehiclesAYESHANo ratings yet
- Advanced Adaptive Cruise Control System For An Automobile: ISSN (ONLINE) : 2250-0758, ISSN (PRINT) : 2394-6962Document4 pagesAdvanced Adaptive Cruise Control System For An Automobile: ISSN (ONLINE) : 2250-0758, ISSN (PRINT) : 2394-6962Basheer T MNo ratings yet
- Synopsis Major Project FinalDocument5 pagesSynopsis Major Project FinalHarsh MundraNo ratings yet
- Anti Theft Conference - ProposalDocument8 pagesAnti Theft Conference - ProposalNeil SantosNo ratings yet
- A Certain Investigation of Smart System For Regulating Vanet Traffic With Probable Path PlanningDocument7 pagesA Certain Investigation of Smart System For Regulating Vanet Traffic With Probable Path PlanningRa muNo ratings yet
- GPS Tracking System Using ARDUINODocument15 pagesGPS Tracking System Using ARDUINORenu PeriketiNo ratings yet
- Conference 12 OPTIM 2012Document6 pagesConference 12 OPTIM 2012Vlad PopescuNo ratings yet
- Vehicle Tracking System Using Map-Matching Search Algorithm.Document45 pagesVehicle Tracking System Using Map-Matching Search Algorithm.Okunade Oluwafemi100% (2)
- MARUFDocument42 pagesMARUFbanogjonathan8No ratings yet
- Rodriguez Mva 2011Document16 pagesRodriguez Mva 2011Felipe Taha Sant'AnaNo ratings yet
- v61 14Document9 pagesv61 14jitendra_mawaiNo ratings yet
- Automatic Number Plate Recognition: Unlocking the Potential of Computer Vision TechnologyFrom EverandAutomatic Number Plate Recognition: Unlocking the Potential of Computer Vision TechnologyNo ratings yet
- Automatic Number Plate Recognition: Fundamentals and ApplicationsFrom EverandAutomatic Number Plate Recognition: Fundamentals and ApplicationsNo ratings yet
- Motion Estimation: Advancements and Applications in Computer VisionFrom EverandMotion Estimation: Advancements and Applications in Computer VisionNo ratings yet
- Estimation of Crash Injury Severity Reduction For IvsDocument9 pagesEstimation of Crash Injury Severity Reduction For IvsEnrico NardiNo ratings yet
- Designing c2x Communication Infrastructure Based On Iot For Curitiba's PtsDocument6 pagesDesigning c2x Communication Infrastructure Based On Iot For Curitiba's PtsEnrico NardiNo ratings yet
- Car2X Communication: Securing The Last MeterDocument5 pagesCar2X Communication: Securing The Last MeterEnrico NardiNo ratings yet
- Broadcast Authentication in Latency-Critical Applications On The Efficiency of IEEE 1609.2Document11 pagesBroadcast Authentication in Latency-Critical Applications On The Efficiency of IEEE 1609.2Enrico NardiNo ratings yet
- Politics of Pedestrian Level Urban Wind ControlDocument5 pagesPolitics of Pedestrian Level Urban Wind ControlEnrico NardiNo ratings yet
- Pedestrian Wind Comfort Around Buildings - Comparison of Wind Comfort Criteria Based On Whole-Flow Field Data For A Complex Case StudyDocument16 pagesPedestrian Wind Comfort Around Buildings - Comparison of Wind Comfort Criteria Based On Whole-Flow Field Data For A Complex Case StudyEnrico NardiNo ratings yet
- Improving Pedestrian Wind Comfort Around A High Rise Building in An Urban AreaDocument8 pagesImproving Pedestrian Wind Comfort Around A High Rise Building in An Urban AreaEnrico NardiNo ratings yet
- Evaluation of Pedestrian Winds in Urban AreaDocument15 pagesEvaluation of Pedestrian Winds in Urban AreaEnrico NardiNo ratings yet
- Basic Navigation: His Fuel Management, So That The Flight Could Be Continued in SafetyDocument1 pageBasic Navigation: His Fuel Management, So That The Flight Could Be Continued in SafetyUser123456nameNo ratings yet
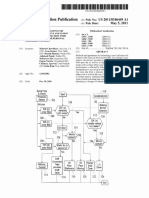
- United States: (12) Patent Application Publication (10) Pub. No.: US 2011/0106449 A1Document12 pagesUnited States: (12) Patent Application Publication (10) Pub. No.: US 2011/0106449 A1sanjaydrdoNo ratings yet
- London P&i Stoploss For ChittagongDocument4 pagesLondon P&i Stoploss For Chittagongtarunksm311No ratings yet
- Navigation 2 PlottingDocument9 pagesNavigation 2 Plottingmanny casiquinNo ratings yet
- 84A2810182V-Nr 199 The Radio Navigation SystemDocument44 pages84A2810182V-Nr 199 The Radio Navigation SystemFerhan SerdarogluNo ratings yet
- Definition and Purpose: 700. The Importance of Dead ReckoningDocument8 pagesDefinition and Purpose: 700. The Importance of Dead ReckoningjfgohlkeNo ratings yet
- An Overview of Autonomous Crop Row Navigation Strategies For Unmanned Ground VehiclesDocument8 pagesAn Overview of Autonomous Crop Row Navigation Strategies For Unmanned Ground VehiclesSudhanwa KulkarniNo ratings yet
- Introduction To Marine Navigation - 2Document2 pagesIntroduction To Marine Navigation - 2Prana AdyaNo ratings yet
- 5 Non Basic Modes PDFDocument8 pages5 Non Basic Modes PDFKunal SinghNo ratings yet
- Robotics - Sensors and Methods For Autonomous Mobile Robot PDocument204 pagesRobotics - Sensors and Methods For Autonomous Mobile Robot PReginaldo AlvesNo ratings yet
- Etd8273 YZhangDocument124 pagesEtd8273 YZhangVũ Mạnh CườngNo ratings yet
- Encoder Con Mouse OpticoDocument9 pagesEncoder Con Mouse OpticoJorge Hernán Osorio SánchezNo ratings yet
- Operator Manual: E5024 ECDIS SystemDocument80 pagesOperator Manual: E5024 ECDIS SystemEduard PrikhodkoNo ratings yet
- DP Operator Manual: Section 5 Non Basic ModesDocument8 pagesDP Operator Manual: Section 5 Non Basic ModesKunal SinghNo ratings yet
- Dead Reckoning PDFDocument6 pagesDead Reckoning PDFChiazor KevinNo ratings yet
- 11 SLAM and NavigationDocument60 pages11 SLAM and NavigationSaksham Jain100% (1)
- MSL 101 L04 OrienteeringDocument12 pagesMSL 101 L04 OrienteeringVetLegacyLdr100% (2)
- System Description - Infotainment and Navigation SystemDocument14 pagesSystem Description - Infotainment and Navigation SystemergdegNo ratings yet
- Land Navigation Tools and Techniques-1Document12 pagesLand Navigation Tools and Techniques-1Martin ApolinarNo ratings yet
- Hs2000 ManualDocument88 pagesHs2000 Manualjorgemendoza1987No ratings yet
- Intro To Air NavigationDocument182 pagesIntro To Air NavigationSean Stephenson100% (2)
- Man Ecdis 213 Uk 2Document280 pagesMan Ecdis 213 Uk 2Theodoros MarinakisNo ratings yet
- Dead Reckoning NavigationDocument8 pagesDead Reckoning NavigationKonstantinos AirmanNo ratings yet
- VýpočtyDocument7 pagesVýpočtywertcz11No ratings yet
- CP 1-8 - PPT - Current, Leeway, Set & DriftDocument22 pagesCP 1-8 - PPT - Current, Leeway, Set & DriftThe SinghNo ratings yet