Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalNo ratings yet
- Part 4 of 5Document6 pagesPart 4 of 5mick.pride81No ratings yet
- Field Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsDocument6 pagesField Oriented Control Reduces Motor Size, Cost and Power Consumption in Industrial ApplicationsnikanikolinaNo ratings yet
- Parameter Identification and Comparision of An Induction Motor ModelsDocument11 pagesParameter Identification and Comparision of An Induction Motor ModelsJUAN4201No ratings yet
- Speed Control of DC Motor by Using PWM TechniqueDocument51 pagesSpeed Control of DC Motor by Using PWM TechniqueYuvraj GogoiNo ratings yet
- Analytical and Experimental Investigation of A Low Torque, Ultra-High Speed Drive SystemDocument7 pagesAnalytical and Experimental Investigation of A Low Torque, Ultra-High Speed Drive SystemJerry HalibasNo ratings yet
- ReportfinalDocument44 pagesReportfinalYuvraj GogoiNo ratings yet
- U1 EdDocument2 pagesU1 EdOMKAR PATILNo ratings yet
- Induction Motor For Crane ApplicationDocument5 pagesInduction Motor For Crane ApplicationPankaj KumarNo ratings yet
- Adaptive Bandwidth Approach ON DTC Controlled Induction MotorDocument9 pagesAdaptive Bandwidth Approach ON DTC Controlled Induction MotorijicsjournalNo ratings yet
- Simulation of Closed Loop Control of Buck Converter Fed DC Motor DriveDocument4 pagesSimulation of Closed Loop Control of Buck Converter Fed DC Motor DriveIJSTENo ratings yet
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- AC Induction Motor SlipDocument6 pagesAC Induction Motor SlipnotastudentNo ratings yet
- Unit VDocument23 pagesUnit VDhaval PatelNo ratings yet
- 3 Phase Induction Motor Speed Control Using PIC PDFDocument18 pages3 Phase Induction Motor Speed Control Using PIC PDFAmmar Al-Kindy100% (2)
- Different Methods of Speed Control of Three-Phase PDFDocument7 pagesDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoNo ratings yet
- Amplifier ServoDocument3 pagesAmplifier ServoinputzNo ratings yet
- ED1000Document4 pagesED1000Mohamed TahounNo ratings yet
- 2.8 Classes - Speed - Control - and - Starting - of - DC - MotorsDocument5 pages2.8 Classes - Speed - Control - and - Starting - of - DC - MotorsEdison EstrellaNo ratings yet
- Speed Control of D C MOTOR Using Chopper-1308Document7 pagesSpeed Control of D C MOTOR Using Chopper-1308Moon3pellNo ratings yet
- Speed Control of DC MotorDocument10 pagesSpeed Control of DC MotorYadira RocanoNo ratings yet
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- Ain Shams University Faculty of Engineering Chep Energy SeniorDocument12 pagesAin Shams University Faculty of Engineering Chep Energy Seniorbanana_26No ratings yet
- Design Example For Alternator "Load Dump"Document20 pagesDesign Example For Alternator "Load Dump"Sandeep MishraNo ratings yet
- Sri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersDocument12 pagesSri Shakthi Institute of Engg and Technology: Two Marks Questions and AnswersdhivyadevinNo ratings yet
- Industrial Circuits Application NoteDocument3 pagesIndustrial Circuits Application Notequechild180No ratings yet
- 1 Introduction 2. TheoryDocument33 pages1 Introduction 2. TheorychikulenkaNo ratings yet
- PID Controller For A Two Quadrant Chopper Fed DC Motor DriveDocument5 pagesPID Controller For A Two Quadrant Chopper Fed DC Motor DriveSalman HabibNo ratings yet
- NNS Notes ServomotorDocument9 pagesNNS Notes ServomotorNarendra SinhaNo ratings yet
- Speed Control of DC Motor Using PWMDocument23 pagesSpeed Control of DC Motor Using PWMSunitha MaryNo ratings yet
- Low Cost Single Phase To Three Phase ConverterDocument12 pagesLow Cost Single Phase To Three Phase Converteraravind alexisNo ratings yet
- Induction MotorDocument6 pagesInduction MotorHamdani RizkiNo ratings yet
- MV Industrial VSDDocument7 pagesMV Industrial VSDONILEDA1970No ratings yet
- Electrical Drives (ARG)Document24 pagesElectrical Drives (ARG)alu bhindiNo ratings yet
- Thesis On Switched Reluctance MotorDocument4 pagesThesis On Switched Reluctance Motorbsqxd5g1100% (2)
- 1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Document9 pages1.1 TRIAC: BLDEA'S Engineering College DEPARTMENT OF EEE)Sushmita PatilNo ratings yet
- Unit-Iv Rotor Side Controlled Induction Motor DriveDocument34 pagesUnit-Iv Rotor Side Controlled Induction Motor DriveChinnu ChinniNo ratings yet
- Robust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Document6 pagesRobust Self-Tuning MTPA Algorithm For IPMSM Drives 2008Giang LamNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- EMD Assignment - 2021 FinalDocument24 pagesEMD Assignment - 2021 FinalTushar TaruNo ratings yet
- How To Drive DC Motors With Smart Power IcsDocument14 pagesHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićNo ratings yet
- DSP Control of Stepper MotorDocument5 pagesDSP Control of Stepper MotorAhmedHyderMohdNo ratings yet
- VVVF DrivesDocument16 pagesVVVF DrivesIsradani MjNo ratings yet
- Help - Brushless DC Motor Drive - Blocks (SimPowerSystems™)Document15 pagesHelp - Brushless DC Motor Drive - Blocks (SimPowerSystems™)lojain centerNo ratings yet
- Matrix AdvantagesDocument14 pagesMatrix AdvantagesAdeline WinsterNo ratings yet
- Induction Motor Speed Control Using Fuzzy Logic Controller: AbstractDocument15 pagesInduction Motor Speed Control Using Fuzzy Logic Controller: AbstractAvinash VenkatNo ratings yet
- 445 AndradaDocument5 pages445 AndradaNishant GoyalNo ratings yet
- LCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Document10 pagesLCIs and Syn Motors Applied To Roller Mills - Zayechek - 2000Parameswararao BillaNo ratings yet
- Speed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueDocument6 pagesSpeed Control of Single Phase Induction Motor Using AC Chopper by Asymmetrical PWM TechniqueGRD Journals100% (2)
- Speed Control of Induction Motor by Using Cyclo-ConverterDocument5 pagesSpeed Control of Induction Motor by Using Cyclo-ConverterBiswajit ChangkakotyNo ratings yet
- Bond Graph Modeling and Computer Simulation of Automotive Torque ConvertersDocument22 pagesBond Graph Modeling and Computer Simulation of Automotive Torque ConvertersPratik ShahNo ratings yet
- Speed Control of DC MotorDocument19 pagesSpeed Control of DC MotorVijaya LakshmiNo ratings yet
- Aplicação e Seleção de Drives AbbDocument13 pagesAplicação e Seleção de Drives AbbThalita Viganó ArraisNo ratings yet
- Transient Stability Analysis For 6 Bus System Using E-TapDocument10 pagesTransient Stability Analysis For 6 Bus System Using E-TapSaran KuttyNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Specificatii Tehnice Schneider RM4TR32Document7 pagesSpecificatii Tehnice Schneider RM4TR32wwcbaNo ratings yet
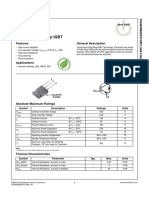
- FGH60N60SFD: 600V, 60A Field Stop IGBTDocument9 pagesFGH60N60SFD: 600V, 60A Field Stop IGBTManuel Sierra100% (1)
- Digital Code LockDocument2 pagesDigital Code LockchakralabsNo ratings yet
- True Bypass With Latching Relay: Smudgerd 14 CommentsDocument8 pagesTrue Bypass With Latching Relay: Smudgerd 14 Commentsnanodocl5099No ratings yet
- Loco Model Booklet 2003Document22 pagesLoco Model Booklet 2003satsanh_22100% (1)
- Infoplc Net Tinfo12 PDFDocument1 pageInfoplc Net Tinfo12 PDFUrbanslo1No ratings yet
- InverterDocument4 pagesInverterfransjack1234No ratings yet
- VLSI Design: Introduction To Digital Integrated CircuitsDocument16 pagesVLSI Design: Introduction To Digital Integrated CircuitsLove FahadNo ratings yet
- Elcb, RCCB, ElboDocument5 pagesElcb, RCCB, ElboNisitha Tharushan DarmarathnaNo ratings yet
- Principle of Operation Construction Types of Transformers Emf EquationDocument27 pagesPrinciple of Operation Construction Types of Transformers Emf EquationSnr Berel ShepherdNo ratings yet
- Homemade 2000 VA Power Inverter Circuit - Homemade Circuit ProjectsDocument3 pagesHomemade 2000 VA Power Inverter Circuit - Homemade Circuit ProjectsK. RAJA SEKARNo ratings yet
- MT 79398Document1 pageMT 79398kiran bathalaNo ratings yet
- PLC AC MotorDocument3 pagesPLC AC MotorAhmedNo ratings yet
- E106 - Grounding System Installation CKLST Rev 00 11.11Document1 pageE106 - Grounding System Installation CKLST Rev 00 11.11bobby CanaresNo ratings yet
- HDW6 2000acbDocument19 pagesHDW6 2000acbRoxanneNo ratings yet
- G3MB 202Document5 pagesG3MB 202Saw LinNo ratings yet
- Siemen Solid State Starter Old Version PDFDocument41 pagesSiemen Solid State Starter Old Version PDFkachanansNo ratings yet
- A Project Report On "Analysis of Banebot Motor " Submitted by Prachi Patil (BE20S02F007)Document37 pagesA Project Report On "Analysis of Banebot Motor " Submitted by Prachi Patil (BE20S02F007)Prachi Rahul PatilNo ratings yet
- AT9932 Automotive Boost Buck LED Lamp Driver IC Data Sheet 20005789ADocument18 pagesAT9932 Automotive Boost Buck LED Lamp Driver IC Data Sheet 20005789AJohnNo ratings yet
- CCS2 To GBT DC EV Adapter DescriptionDocument1 pageCCS2 To GBT DC EV Adapter DescriptionHuang MironNo ratings yet
- EE42111 MV SWG JazanDocument18 pagesEE42111 MV SWG JazandanielcabasaNo ratings yet
- WWW - Manaresults.co - In: Ac Machines - IDocument3 pagesWWW - Manaresults.co - In: Ac Machines - IVARAPRASADNo ratings yet
- Catalog Sparkfun APR 2013Document50 pagesCatalog Sparkfun APR 2013nugroho_budiNo ratings yet
- Installation Instructions Separable Elbow Connector - CENELEC Interface Type ADocument7 pagesInstallation Instructions Separable Elbow Connector - CENELEC Interface Type AElecmor06 Elecmor06No ratings yet
- Elektrolites 33kv Outdoor VCBDocument1 pageElektrolites 33kv Outdoor VCBrmgsalemNo ratings yet
- DC Machines and TransformersDocument8 pagesDC Machines and TransformersAlakaaa PromodNo ratings yet
- 22527-2019-Winter-Model-Answer-Paper (Msbte Study Resources)Document24 pages22527-2019-Winter-Model-Answer-Paper (Msbte Study Resources)mr.lightyagami1234No ratings yet
- Fig. 4.1: Different TransistorsDocument10 pagesFig. 4.1: Different Transistorsmsicoie1851No ratings yet
- ATS Drawing (R0) 30-Oct-12Document16 pagesATS Drawing (R0) 30-Oct-12Shrikant KajaleNo ratings yet