Download as pdf or txt
You might also like
- (Feynman) Space-Time Approach To Non-Relativistic Quantum MechanicsDocument21 pages(Feynman) Space-Time Approach To Non-Relativistic Quantum MechanicsKenion AssunçãoNo ratings yet
- 72 Yak 54 ManualDocument10 pages72 Yak 54 Manualpeng_dongtao2054No ratings yet
- Dark Matter As A Result of Field Oscillations in TDocument15 pagesDark Matter As A Result of Field Oscillations in Targ0nautNo ratings yet
- September: Physical Review 15 Integrals $Document7 pagesSeptember: Physical Review 15 Integrals $Célio LimaNo ratings yet
- Power and Beauty of The Lagrange EquationsDocument8 pagesPower and Beauty of The Lagrange EquationsVICTORNo ratings yet
- A. O. Barvinsky, C. de Ffayet and A. Yu. Kamenshchik - Density Matrix of The Universe Reloaded: Origin of Inflation and Cosmological AccelerationDocument18 pagesA. O. Barvinsky, C. de Ffayet and A. Yu. Kamenshchik - Density Matrix of The Universe Reloaded: Origin of Inflation and Cosmological AccelerationJomav23No ratings yet
- Symmetries and The Cosmological Constant PuzzleDocument11 pagesSymmetries and The Cosmological Constant PuzzleBlagojeNo ratings yet
- Interacting Classical and Quantum Particles: PACS Numbers: 03.65.ca, 03.65.ta, 04.60.-mDocument7 pagesInteracting Classical and Quantum Particles: PACS Numbers: 03.65.ca, 03.65.ta, 04.60.-mRobert DavisNo ratings yet
- Quantum Interactions Between A Laser Interferometer and Gravitational WavesDocument13 pagesQuantum Interactions Between A Laser Interferometer and Gravitational WavesfafaNo ratings yet
- PinheiroBuker EPL PDFDocument6 pagesPinheiroBuker EPL PDFMario J. PinheiroNo ratings yet
- Cómo Convertir Un Oscilador Armónico en Una Partícula LibreDocument8 pagesCómo Convertir Un Oscilador Armónico en Una Partícula LibreRodrigo Sanchez MartinezNo ratings yet
- Quantum Annealing Inversion and Its ImplementationDocument8 pagesQuantum Annealing Inversion and Its ImplementationPangestu WibisonoNo ratings yet
- Letter To The Editor: Scale-Relativity and Quantization of Extra-Solar Planetary SystemsDocument4 pagesLetter To The Editor: Scale-Relativity and Quantization of Extra-Solar Planetary SystemsmnguyenNo ratings yet
- J. Gregory Moxness - A More Natural Reference Model Integrating Relativity and Quantum MechanicsDocument28 pagesJ. Gregory Moxness - A More Natural Reference Model Integrating Relativity and Quantum MechanicstheherbsmithNo ratings yet
- Nontrivial GeometriesDocument7 pagesNontrivial GeometriesMartin BullichNo ratings yet
- Qualitative Yang-Mills TheoryDocument34 pagesQualitative Yang-Mills TheoryNomaan AhmedNo ratings yet
- Mecánica Clásica - L.S.F. Olavo - Quantum Mechanics As A Classical TheoryDocument12 pagesMecánica Clásica - L.S.F. Olavo - Quantum Mechanics As A Classical TheoryEloise RodriguesNo ratings yet
- Universe 09 00284Document16 pagesUniverse 09 00284fabri bazzoniNo ratings yet
- The Transient Acceleration From Time-Dependent Interacting Dark Energy ModelsDocument18 pagesThe Transient Acceleration From Time-Dependent Interacting Dark Energy ModelscrocoaliNo ratings yet
- Dual-Time Supercausality (1989) Physics Essays 2/2 128-151Document29 pagesDual-Time Supercausality (1989) Physics Essays 2/2 128-151DanToledoNo ratings yet
- Correspondence, Time, Energy, Uncertainty, Tunnelling, and Collapse of Probability DensitiesDocument17 pagesCorrespondence, Time, Energy, Uncertainty, Tunnelling, and Collapse of Probability DensitiesBeni ManialupNo ratings yet
- MIT8 962S20 Pset06Document5 pagesMIT8 962S20 Pset06Robin Red MsiskaNo ratings yet
- Molecular Dynamics Simulations in Materials Science: Algorithms, Interatomic Potentials and Parallel ComputingDocument41 pagesMolecular Dynamics Simulations in Materials Science: Algorithms, Interatomic Potentials and Parallel Computingnuova0No ratings yet
- Conservation of The Nonlinear Curvature Perturbation in Generic Single-Field InflationDocument8 pagesConservation of The Nonlinear Curvature Perturbation in Generic Single-Field InflationWilliam AlgonerNo ratings yet
- Einstein Equations, Cosmological Constant and All That.: Prepared For Submission To JHEPDocument33 pagesEinstein Equations, Cosmological Constant and All That.: Prepared For Submission To JHEPEduardo Salgado EnríquezNo ratings yet
- Power-Law Genesis: Strong Coupling and Galileon-Like Vector FieldsDocument9 pagesPower-Law Genesis: Strong Coupling and Galileon-Like Vector FieldsHWNo ratings yet
- Quantum Chaos in The Nuclear Collective Model: I. Classical-Quantum CorrespondenceDocument10 pagesQuantum Chaos in The Nuclear Collective Model: I. Classical-Quantum CorrespondenceBayer MitrovicNo ratings yet
- Dark EnergyDocument19 pagesDark EnergyEnrique GuardadoNo ratings yet
- Time-Varying G in Shift-Symmetric Scalar-Tensor Theories With A Vainshtein MechanismDocument4 pagesTime-Varying G in Shift-Symmetric Scalar-Tensor Theories With A Vainshtein MechanismItz TimezNo ratings yet
- Ten1perature, Least Action, and Lagrangian Mechanics: William G. HooverDocument3 pagesTen1perature, Least Action, and Lagrangian Mechanics: William G. HooverTodor TodorovNo ratings yet
- Noncommutativity and Parametrization of Fields: The Scalar Electrodynamics CaseDocument29 pagesNoncommutativity and Parametrization of Fields: The Scalar Electrodynamics Caseragnarok2015No ratings yet
- Group Approach To Quantization of Yang-Mills Theories: A Cohomological Origin of MassDocument21 pagesGroup Approach To Quantization of Yang-Mills Theories: A Cohomological Origin of MassBayer MitrovicNo ratings yet
- Effective Theories Modifications of GravityDocument21 pagesEffective Theories Modifications of GravitytonyamargosaNo ratings yet
- 1108 3269v1 PDFDocument58 pages1108 3269v1 PDFShweta SridharNo ratings yet
- Unit 1 Introduction To The Statistical Physics. The Microcanonical EnsembleDocument32 pagesUnit 1 Introduction To The Statistical Physics. The Microcanonical EnsembleJesus MoralNo ratings yet
- SCHR Odinger Equation From An Exact Uncertainty PrincipleDocument16 pagesSCHR Odinger Equation From An Exact Uncertainty PrincipleJonNo ratings yet
- Symmetric Teleparallel General RelativityDocument6 pagesSymmetric Teleparallel General RelativityAnujThakurNo ratings yet
- Everpresent LambaDocument10 pagesEverpresent LambahypercubicityNo ratings yet
- The Ideas of Gravitational Effective Field TheoryDocument6 pagesThe Ideas of Gravitational Effective Field TheoryBayer MitrovicNo ratings yet
- 7 Equlibrium Statistical MechanicsDocument10 pages7 Equlibrium Statistical MechanicsRadoslaw RyblewskiNo ratings yet
- Equilibrium Statistical MechanicsDocument56 pagesEquilibrium Statistical Mechanicsfevv1610No ratings yet
- Traversable Wormholes and Time Machines in Non-Minimally Coupled Curvature-Matter F (R) TheoriesDocument6 pagesTraversable Wormholes and Time Machines in Non-Minimally Coupled Curvature-Matter F (R) TheoriesVasco FerreiraNo ratings yet
- Eulerian Versus Lagrangian Variational Principles in Stochastic MechanicsDocument12 pagesEulerian Versus Lagrangian Variational Principles in Stochastic MechanicsLeonardo ParraNo ratings yet
- October 14, 2011 11:33 Wspc/Instruction File 00117: Weyl Geometry As Characterization of Space-TimeDocument11 pagesOctober 14, 2011 11:33 Wspc/Instruction File 00117: Weyl Geometry As Characterization of Space-TimejosesalimNo ratings yet
- Palatini Form of 1/R GravityDocument4 pagesPalatini Form of 1/R GravityRicardo AlbrechtNo ratings yet
- On The Connection Between Quantum Mechanics and The Geometry of Two-Dimensional StringsDocument20 pagesOn The Connection Between Quantum Mechanics and The Geometry of Two-Dimensional Stringsdeepak_seniorNo ratings yet
- Action-Angle Variables in Curved Space-TimeDocument8 pagesAction-Angle Variables in Curved Space-TimeGNo ratings yet
- Christian G. Bohmer and James Burnett - Dark Spinors With Torsion in CosmologyDocument7 pagesChristian G. Bohmer and James Burnett - Dark Spinors With Torsion in CosmologyVelveetNo ratings yet
- Entropy: Connecting Information Geometry and Geometric MechanicsDocument31 pagesEntropy: Connecting Information Geometry and Geometric Mechanicsbadid SusskindNo ratings yet
- Hydrodynamic Transport Functions From Quantum Kinetic Field TheoryDocument20 pagesHydrodynamic Transport Functions From Quantum Kinetic Field TheoryKaustubhNo ratings yet
- Influence of Dissipation On Quantum Tunneling in Macroscopic SystemsDocument4 pagesInfluence of Dissipation On Quantum Tunneling in Macroscopic SystemsAakif AkhtarNo ratings yet
- Intro FieldsDocument28 pagesIntro FieldsGerman ChiappeNo ratings yet
- Impact Models of Gravitational and Electrostatic ForcesDocument23 pagesImpact Models of Gravitational and Electrostatic ForcesPatrickNo ratings yet
- RubberbandDocument3 pagesRubberbandMatt MacNo ratings yet
- Ch01 PDFDocument33 pagesCh01 PDFphooolNo ratings yet
- Scalar Radiation With A Quartic Galileon: Claudia de Rham John T. Giblin, Jr. Andrew J. TolleyDocument13 pagesScalar Radiation With A Quartic Galileon: Claudia de Rham John T. Giblin, Jr. Andrew J. Tolleysoljay100No ratings yet
- I I I IDocument14 pagesI I I Isscript14No ratings yet
- A Postquantum Theory of Classical GravityDocument37 pagesA Postquantum Theory of Classical GravitylerhlerhNo ratings yet
- The Four Variational Principles of MechanicsDocument25 pagesThe Four Variational Principles of MechanicsCanh LeNo ratings yet
- Letters: Physical Review Density-FunctionalDocument4 pagesLetters: Physical Review Density-Functionalبدون اسمNo ratings yet
- Theology Finals - Grade 11Document7 pagesTheology Finals - Grade 11Sophia BiancaNo ratings yet
- Ocean Acidification - Yet Another Wobbly Pillar of Climate AlarmismDocument6 pagesOcean Acidification - Yet Another Wobbly Pillar of Climate AlarmismcaioNo ratings yet
- RM RM RM RM RM: 3684nwxci 3684wxci Aspire 5583wxmi Aspire 5573A Wxmi Aspire 5054nwxmiDocument1 pageRM RM RM RM RM: 3684nwxci 3684wxci Aspire 5583wxmi Aspire 5573A Wxmi Aspire 5054nwxmialexcus1539No ratings yet
- Dairy Farm Project Report - Buffalo (Large Scale)Document2 pagesDairy Farm Project Report - Buffalo (Large Scale)VIJAYJKNo ratings yet
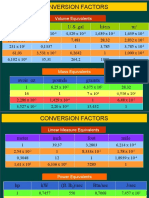
- Conversion Factors: in FT U.S. Gal Liters MDocument8 pagesConversion Factors: in FT U.S. Gal Liters MSamuel MahendraNo ratings yet
- Little Baguio Building Rules and Regulations DraftDocument7 pagesLittle Baguio Building Rules and Regulations DraftJun Dela CruzNo ratings yet
- Physics 326 - Optics and Laser Physics 2017Document123 pagesPhysics 326 - Optics and Laser Physics 2017Parthasarathi JoarderNo ratings yet
- Euro Currency MarketDocument33 pagesEuro Currency Marketsfkokane83% (6)
- Pre Loading Condition SurveyDocument16 pagesPre Loading Condition Surveymax.pitchiah100% (1)
- Meyer Liadain and CurithirDocument27 pagesMeyer Liadain and CurithirFangzhe QiuNo ratings yet
- Signals and Systems: BITS PilaniDocument21 pagesSignals and Systems: BITS Pilanirajeevdutt_1215No ratings yet
- Annex 52A Selection of Wiring Systems: (Normative)Document10 pagesAnnex 52A Selection of Wiring Systems: (Normative)Mihaela AntonNo ratings yet
- Sample For Official Solution Manual Dynamics (8th Edition) by Meriam & KraigeDocument26 pagesSample For Official Solution Manual Dynamics (8th Edition) by Meriam & Kraigeomar burakNo ratings yet
- Netflix ReportDocument9 pagesNetflix ReportMarijuana MomentNo ratings yet
- Practical Stress Analysis For Design... by Flabel, Jean-ClaudeDocument1 pagePractical Stress Analysis For Design... by Flabel, Jean-ClaudeDAVID GRACEYNo ratings yet
- HF Conventions: Marine VDocument21 pagesHF Conventions: Marine VHarun KınalıNo ratings yet
- Fire Pump Field Acceptance TestDocument23 pagesFire Pump Field Acceptance Testwalitedison100% (1)
- 2019 Gynecomastia EAA Clinical Practice Guidelines PDFDocument16 pages2019 Gynecomastia EAA Clinical Practice Guidelines PDFRaluk BalaceanuNo ratings yet
- Science 7 Q4 SLM11Document15 pagesScience 7 Q4 SLM11Seen Tuna-doughNo ratings yet
- Improve Your Skills For IELTS - Reading Low pp14-22Document9 pagesImprove Your Skills For IELTS - Reading Low pp14-22Suna KimNo ratings yet
- Catchillar - Environmental LawsDocument10 pagesCatchillar - Environmental LawsPam SyNo ratings yet
- Nirman VriddhiDocument24 pagesNirman VriddhiNarmad RavalNo ratings yet
- Machines Lab 5 UTECHDocument6 pagesMachines Lab 5 UTECHDellonNo ratings yet
- Chapter - 10: Respiration in OrganismsDocument13 pagesChapter - 10: Respiration in OrganismsCHINMAYA RANJAN SAHOONo ratings yet
- 10yr Capital Works Program 2012 21Document8 pages10yr Capital Works Program 2012 21Joe BidenNo ratings yet
- Integrated Circuits Applications Laboratory: Lab ManualDocument72 pagesIntegrated Circuits Applications Laboratory: Lab ManualRajkumar RajNo ratings yet
- Net Ionic Equations-ProblemsDocument3 pagesNet Ionic Equations-ProblemsChikuta ShingaliliNo ratings yet
- The Advantages and Disadvantage of Opt in in Smart GridDocument3 pagesThe Advantages and Disadvantage of Opt in in Smart GridFathur RoesliNo ratings yet
- Mosaic TRD2 Tests U7 1Document3 pagesMosaic TRD2 Tests U7 1Patricia Alfaro GarijoNo ratings yet