
YWFj YTg 1 OTRi NTG 3 MJ Uy OTlk Y2 RH N2 My MGIy NDM5 ODg 2 ZJ U3 OThm YQ
YWFj YTg 1 OTRi NTG 3 MJ Uy OTlk Y2 RH N2 My MGIy NDM5 ODg 2 ZJ U3 OThm YQ
You might also like
- GW4C20 Engine Manual 20140513 EDocument194 pagesGW4C20 Engine Manual 20140513 ESantiago CosNo ratings yet
- Can I Ask You A QuestionDocument3 pagesCan I Ask You A QuestionlaiaNo ratings yet
- Ship Particular Mother VesselDocument1 pageShip Particular Mother VesselAkun GocarNo ratings yet
- Cimil 9487378 Oil Chemical Tanker 71385Document2 pagesCimil 9487378 Oil Chemical Tanker 71385Ahmed HossamNo ratings yet
- ABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmDocument2 pagesABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmAbhijithNo ratings yet
- Ships Particular Up Date Jul 16Document5 pagesShips Particular Up Date Jul 16Ihwan AsrulNo ratings yet
- Ship Partticular AsrDocument11 pagesShip Partticular AsrPrawoto SragenNo ratings yet
- Ship'S Particulars: Draft (MLD.) Density DWT Displacement TPC FWA T. Fresh Fresh Tropical Summer WinterDocument2 pagesShip'S Particulars: Draft (MLD.) Density DWT Displacement TPC FWA T. Fresh Fresh Tropical Summer WinterBarış ÖzturkNo ratings yet
- Seacor Maya: Main Particulars Electronics & ControlsDocument2 pagesSeacor Maya: Main Particulars Electronics & ControlsarnoldbusaNo ratings yet
- Ship ParticularsDocument6 pagesShip Particularsjwzcrh5rndNo ratings yet
- Ships Particular 1Document2 pagesShips Particular 1Lasha MamuladzeNo ratings yet
- Containership (1) UniFlorida PDFDocument1 pageContainership (1) UniFlorida PDFAriv Nicobar Reborn0% (1)
- 20-Lampiran 1 Ship ParticularDocument1 page20-Lampiran 1 Ship ParticularAkun Gocar100% (1)
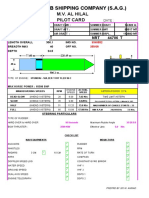
- United Arab Shipping Company (S.A.G.) : M.V. Al Hilal Pilot CardDocument3 pagesUnited Arab Shipping Company (S.A.G.) : M.V. Al Hilal Pilot CardAamir Sirohi100% (2)
- Ship ParticularsDocument1 pageShip ParticularsKaio Andrade100% (2)
- Ship ParticularDocument1 pageShip ParticularMuh. Risqullah FadilNo ratings yet
- Ships ParticularsDocument3 pagesShips ParticularsM. K. HossainNo ratings yet
- MV NAVIOS BONAVIS Preliminary Report DocumentsDocument11 pagesMV NAVIOS BONAVIS Preliminary Report DocumentsDanielNo ratings yet
- Ship Particulars - PNS SerenaDocument1 pageShip Particulars - PNS SerenaID 29No ratings yet
- Standar Penulisan Ship ParticularDocument1 pageStandar Penulisan Ship ParticularRyandhani Aje100% (1)
- FPMC-25 ParticularsDocument2 pagesFPMC-25 ParticularsSHUSHEELNo ratings yet
- Selina Ii Ship ParticularDocument1 pageSelina Ii Ship ParticularOzan EgemenNo ratings yet
- Cosco (Singapore) Vessel Particulars: Basic DataDocument1 pageCosco (Singapore) Vessel Particulars: Basic DataAyman Awad AlKaremNo ratings yet
- Particular ASRDocument6 pagesParticular ASRPrawoto SragenNo ratings yet
- Ship Particular MBDocument2 pagesShip Particular MBromi.arvNo ratings yet
- GA-B-Class 1Document2 pagesGA-B-Class 1albustamanteNo ratings yet
- Ship'S Particulars: See Next PageDocument2 pagesShip'S Particulars: See Next PageBarış Özturk0% (2)
- MV Amfitriti Ship'S Particulars: Paloma ShippingDocument3 pagesMV Amfitriti Ship'S Particulars: Paloma ShippingNimesh Perera100% (1)
- Kota SejarahDocument1 pageKota SejarahWilmer Mejias DiazNo ratings yet
- Ship Particular PABLODocument1 pageShip Particular PABLOBerbisnisDanBersedekahNo ratings yet
- Các đội tàu của Vosco (Khô-Dầu-Cont)Document13 pagesCác đội tàu của Vosco (Khô-Dầu-Cont)Đức Huy VũNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsEmin AbishovNo ratings yet
- Ship'S Particulars: Load Mark Draught Freeboard Displacement DeadweightDocument2 pagesShip'S Particulars: Load Mark Draught Freeboard Displacement DeadweightSantharam Mariner0% (4)
- Ship' S Particulars: V7UM7 MV E TraderDocument1 pageShip' S Particulars: V7UM7 MV E TraderElenaNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsJanjang WijiartoNo ratings yet
- 11 - Ship Particulars - Eagle PetrolinaDocument1 page11 - Ship Particulars - Eagle PetrolinaCapital Shipping Services0% (1)
- FLYING DUCHESS - Ship Particular - pdf20221013 044601 765Document1 pageFLYING DUCHESS - Ship Particular - pdf20221013 044601 765crewops2No ratings yet
- FIRST BRIDGE-SP NewDocument2 pagesFIRST BRIDGE-SP NewmarioNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsMori Shan24No ratings yet
- Greenwich ParkDocument1 pageGreenwich ParkWilmer Mejias DiazNo ratings yet
- Seacor TarahumaraDocument3 pagesSeacor TarahumaraTrinidad GraneNo ratings yet
- MV Yong Ning ParticularsDocument2 pagesMV Yong Ning ParticularsEdy GunawanNo ratings yet
- 1 Ship's ParticularsDocument1 page1 Ship's ParticularsNikolas PereiraNo ratings yet
- M.T Cururo Ship ParticularsDocument1 pageM.T Cururo Ship ParticularsArchit BhardwajNo ratings yet
- Ship ParticullarDocument2 pagesShip Particullararek BaweanNo ratings yet
- 684509277particulars - Navimar 7 NEWDocument1 page684509277particulars - Navimar 7 NEWAndi Irfan0% (1)
- KSL Santiago Ships ParticularDocument2 pagesKSL Santiago Ships Particularjeff100% (1)
- BBC-12K-240A - BBC Campana TypeDocument2 pagesBBC-12K-240A - BBC Campana TypeH.J.PetersenNo ratings yet
- M/T ST Charlotte: General InformationDocument1 pageM/T ST Charlotte: General InformationDuan QingBinNo ratings yet
- KM Victoria IDocument1 pageKM Victoria IAlven Usvon TamaraNo ratings yet
- Velocity String Installation and Performance ReviewDocument13 pagesVelocity String Installation and Performance ReviewSilicon Density100% (1)
- Akranes Specs 2020Document2 pagesAkranes Specs 2020giovanni julioNo ratings yet
- 5 Swarna Kalash Ib - Ships ParticularsDocument1 page5 Swarna Kalash Ib - Ships Particularskumar.sambit14No ratings yet
- (IKAN SELIGI) Ships ParticularDocument1 page(IKAN SELIGI) Ships ParticularTouhid ShohelNo ratings yet
- Gulf MasDocument15 pagesGulf MasAditya Jalasena JiwandhonoNo ratings yet
- Mogok Star ExcelDocument2 pagesMogok Star ExcelAhmed Hossam0% (1)
- Vessel Particular COSCO MALASIADocument1 pageVessel Particular COSCO MALASIAwiltorNo ratings yet
- Seacor ResoluteDocument2 pagesSeacor ResoluteTrinidad GraneNo ratings yet
- Ship's Particulars - ExlDocument2 pagesShip's Particulars - ExlВиталий ГрибинецNo ratings yet
- Ship'S Particulars: Class DNV GL: OwnersDocument1 pageShip'S Particulars: Class DNV GL: OwnersDāvis DzērveNo ratings yet
- Ship's Particulars MV DEWI SHINTA MANGGALA-NewDocument1 pageShip's Particulars MV DEWI SHINTA MANGGALA-Newangga andi ardiansyahNo ratings yet
- Kapal Data-DataDocument38 pagesKapal Data-DataAlamNo ratings yet
- Ageod EAW. Central Powers. Points To KnowDocument23 pagesAgeod EAW. Central Powers. Points To KnowDaniel EscovedoNo ratings yet
- VW Racing Drop and Raise Plates: VW Tech Tip VW Tech TipDocument4 pagesVW Racing Drop and Raise Plates: VW Tech Tip VW Tech Tiprodney_massieNo ratings yet
- I Bau Hamburg: Original ComponentsDocument28 pagesI Bau Hamburg: Original ComponentsCarlos DiazNo ratings yet
- Warranty & Maintenance Guide: Printed in U.S.A. 6/18 18-TCS-11472Document50 pagesWarranty & Maintenance Guide: Printed in U.S.A. 6/18 18-TCS-11472Hay NakuNo ratings yet
- Perancangan Sistem Informasi Geografis Perlengkapan Jalan Berbasis Daerah Rawan KecelakaanDocument9 pagesPerancangan Sistem Informasi Geografis Perlengkapan Jalan Berbasis Daerah Rawan KecelakaanAlya ArhamNo ratings yet
- Andhra Pradesh State Road Transport Corporation: Online - Support@apsrtconline - inDocument1 pageAndhra Pradesh State Road Transport Corporation: Online - Support@apsrtconline - inManikandan100% (1)
- 392 - 1000HRSDocument2 pages392 - 1000HRSManutenção Base AnápolisNo ratings yet
- Item 702Document18 pagesItem 702Art AV B LimNo ratings yet
- Karakteristik Campuran Beton Aspal (Ac-Wc) Dengan Menggunakan Variasi Kadar Filler Abu Terbang Batu BaraDocument23 pagesKarakteristik Campuran Beton Aspal (Ac-Wc) Dengan Menggunakan Variasi Kadar Filler Abu Terbang Batu BaraArsalia InsyiraaNo ratings yet
- TicketDocument1 pageTicketvikas babuNo ratings yet
- Mmel 212 - 412Document65 pagesMmel 212 - 412agripinaluzmilaaNo ratings yet
- DBR StationDocument32 pagesDBR Stationamit ralkarNo ratings yet
- Black Bolts Screws and Nuts - : Specification ForDocument22 pagesBlack Bolts Screws and Nuts - : Specification FordoyenofcastleNo ratings yet
- B737-800 KuizDocument3 pagesB737-800 Kuizkairol nizam bin mansorNo ratings yet
- S & D MahindraDocument14 pagesS & D MahindraPriyanshu SharmaNo ratings yet
- Fabrication Erection and Installation Procedure For PipingDocument35 pagesFabrication Erection and Installation Procedure For Pipingmohd as shahiddin jafri100% (1)
- Kramer 880Document2 pagesKramer 880Олег СимоновNo ratings yet
- Gas Power CyclesDocument19 pagesGas Power CyclesMa. Monica ConsulNo ratings yet
- VW - Frezone NewDocument2,539 pagesVW - Frezone NewCOSA PARTSNo ratings yet
- 8.control Arm - WDocument50 pages8.control Arm - WEleazar PavonNo ratings yet
- DHS 15apDocument14 pagesDHS 15apadelNo ratings yet
- Assignment 2 EOT 1032Document5 pagesAssignment 2 EOT 1032Rajbir SinghNo ratings yet
- Race Schedule DataDocument4 pagesRace Schedule DataAvelino SumaguiNo ratings yet
- Rineer Hydraulics Inc, Specifications PDFDocument2 pagesRineer Hydraulics Inc, Specifications PDFTulio Andres CoyNo ratings yet
- WayBill Number 228406907Document2 pagesWayBill Number 228406907hasan arbiNo ratings yet
- Sibiu "Liqui Moly" Rally Official FIA Stage Classification Stage Ss 16 'Ss Liqui Moly Ii' Lenght 4 KmsDocument2 pagesSibiu "Liqui Moly" Rally Official FIA Stage Classification Stage Ss 16 'Ss Liqui Moly Ii' Lenght 4 KmsIvanBillNo ratings yet
- Railways-PTLOC CHistoryScrn PDFDocument2 pagesRailways-PTLOC CHistoryScrn PDFmarcusNo ratings yet
























































































Download as pdf or txt
You might also like
- GW4C20 Engine Manual 20140513 EDocument194 pagesGW4C20 Engine Manual 20140513 ESantiago CosNo ratings yet
- Can I Ask You A QuestionDocument3 pagesCan I Ask You A QuestionlaiaNo ratings yet
- Ship Particular Mother VesselDocument1 pageShip Particular Mother VesselAkun GocarNo ratings yet
- Cimil 9487378 Oil Chemical Tanker 71385Document2 pagesCimil 9487378 Oil Chemical Tanker 71385Ahmed HossamNo ratings yet
- ABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmDocument2 pagesABS Check Sheet SOLAS Surveys AIS Radio Tech - DocmAbhijithNo ratings yet
- Ships Particular Up Date Jul 16Document5 pagesShips Particular Up Date Jul 16Ihwan AsrulNo ratings yet
- Ship Partticular AsrDocument11 pagesShip Partticular AsrPrawoto SragenNo ratings yet
- Ship'S Particulars: Draft (MLD.) Density DWT Displacement TPC FWA T. Fresh Fresh Tropical Summer WinterDocument2 pagesShip'S Particulars: Draft (MLD.) Density DWT Displacement TPC FWA T. Fresh Fresh Tropical Summer WinterBarış ÖzturkNo ratings yet
- Seacor Maya: Main Particulars Electronics & ControlsDocument2 pagesSeacor Maya: Main Particulars Electronics & ControlsarnoldbusaNo ratings yet
- Ship ParticularsDocument6 pagesShip Particularsjwzcrh5rndNo ratings yet
- Ships Particular 1Document2 pagesShips Particular 1Lasha MamuladzeNo ratings yet
- Containership (1) UniFlorida PDFDocument1 pageContainership (1) UniFlorida PDFAriv Nicobar Reborn0% (1)
- 20-Lampiran 1 Ship ParticularDocument1 page20-Lampiran 1 Ship ParticularAkun Gocar100% (1)
- United Arab Shipping Company (S.A.G.) : M.V. Al Hilal Pilot CardDocument3 pagesUnited Arab Shipping Company (S.A.G.) : M.V. Al Hilal Pilot CardAamir Sirohi100% (2)
- Ship ParticularsDocument1 pageShip ParticularsKaio Andrade100% (2)
- Ship ParticularDocument1 pageShip ParticularMuh. Risqullah FadilNo ratings yet
- Ships ParticularsDocument3 pagesShips ParticularsM. K. HossainNo ratings yet
- MV NAVIOS BONAVIS Preliminary Report DocumentsDocument11 pagesMV NAVIOS BONAVIS Preliminary Report DocumentsDanielNo ratings yet
- Ship Particulars - PNS SerenaDocument1 pageShip Particulars - PNS SerenaID 29No ratings yet
- Standar Penulisan Ship ParticularDocument1 pageStandar Penulisan Ship ParticularRyandhani Aje100% (1)
- FPMC-25 ParticularsDocument2 pagesFPMC-25 ParticularsSHUSHEELNo ratings yet
- Selina Ii Ship ParticularDocument1 pageSelina Ii Ship ParticularOzan EgemenNo ratings yet
- Cosco (Singapore) Vessel Particulars: Basic DataDocument1 pageCosco (Singapore) Vessel Particulars: Basic DataAyman Awad AlKaremNo ratings yet
- Particular ASRDocument6 pagesParticular ASRPrawoto SragenNo ratings yet
- Ship Particular MBDocument2 pagesShip Particular MBromi.arvNo ratings yet
- GA-B-Class 1Document2 pagesGA-B-Class 1albustamanteNo ratings yet
- Ship'S Particulars: See Next PageDocument2 pagesShip'S Particulars: See Next PageBarış Özturk0% (2)
- MV Amfitriti Ship'S Particulars: Paloma ShippingDocument3 pagesMV Amfitriti Ship'S Particulars: Paloma ShippingNimesh Perera100% (1)
- Kota SejarahDocument1 pageKota SejarahWilmer Mejias DiazNo ratings yet
- Ship Particular PABLODocument1 pageShip Particular PABLOBerbisnisDanBersedekahNo ratings yet
- Các đội tàu của Vosco (Khô-Dầu-Cont)Document13 pagesCác đội tàu của Vosco (Khô-Dầu-Cont)Đức Huy VũNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsEmin AbishovNo ratings yet
- Ship'S Particulars: Load Mark Draught Freeboard Displacement DeadweightDocument2 pagesShip'S Particulars: Load Mark Draught Freeboard Displacement DeadweightSantharam Mariner0% (4)
- Ship' S Particulars: V7UM7 MV E TraderDocument1 pageShip' S Particulars: V7UM7 MV E TraderElenaNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsJanjang WijiartoNo ratings yet
- 11 - Ship Particulars - Eagle PetrolinaDocument1 page11 - Ship Particulars - Eagle PetrolinaCapital Shipping Services0% (1)
- FLYING DUCHESS - Ship Particular - pdf20221013 044601 765Document1 pageFLYING DUCHESS - Ship Particular - pdf20221013 044601 765crewops2No ratings yet
- FIRST BRIDGE-SP NewDocument2 pagesFIRST BRIDGE-SP NewmarioNo ratings yet
- Ship ParticularsDocument1 pageShip ParticularsMori Shan24No ratings yet
- Greenwich ParkDocument1 pageGreenwich ParkWilmer Mejias DiazNo ratings yet
- Seacor TarahumaraDocument3 pagesSeacor TarahumaraTrinidad GraneNo ratings yet
- MV Yong Ning ParticularsDocument2 pagesMV Yong Ning ParticularsEdy GunawanNo ratings yet
- 1 Ship's ParticularsDocument1 page1 Ship's ParticularsNikolas PereiraNo ratings yet
- M.T Cururo Ship ParticularsDocument1 pageM.T Cururo Ship ParticularsArchit BhardwajNo ratings yet
- Ship ParticullarDocument2 pagesShip Particullararek BaweanNo ratings yet
- 684509277particulars - Navimar 7 NEWDocument1 page684509277particulars - Navimar 7 NEWAndi Irfan0% (1)
- KSL Santiago Ships ParticularDocument2 pagesKSL Santiago Ships Particularjeff100% (1)
- BBC-12K-240A - BBC Campana TypeDocument2 pagesBBC-12K-240A - BBC Campana TypeH.J.PetersenNo ratings yet
- M/T ST Charlotte: General InformationDocument1 pageM/T ST Charlotte: General InformationDuan QingBinNo ratings yet
- KM Victoria IDocument1 pageKM Victoria IAlven Usvon TamaraNo ratings yet
- Velocity String Installation and Performance ReviewDocument13 pagesVelocity String Installation and Performance ReviewSilicon Density100% (1)
- Akranes Specs 2020Document2 pagesAkranes Specs 2020giovanni julioNo ratings yet
- 5 Swarna Kalash Ib - Ships ParticularsDocument1 page5 Swarna Kalash Ib - Ships Particularskumar.sambit14No ratings yet
- (IKAN SELIGI) Ships ParticularDocument1 page(IKAN SELIGI) Ships ParticularTouhid ShohelNo ratings yet
- Gulf MasDocument15 pagesGulf MasAditya Jalasena JiwandhonoNo ratings yet
- Mogok Star ExcelDocument2 pagesMogok Star ExcelAhmed Hossam0% (1)
- Vessel Particular COSCO MALASIADocument1 pageVessel Particular COSCO MALASIAwiltorNo ratings yet
- Seacor ResoluteDocument2 pagesSeacor ResoluteTrinidad GraneNo ratings yet
- Ship's Particulars - ExlDocument2 pagesShip's Particulars - ExlВиталий ГрибинецNo ratings yet
- Ship'S Particulars: Class DNV GL: OwnersDocument1 pageShip'S Particulars: Class DNV GL: OwnersDāvis DzērveNo ratings yet
- Ship's Particulars MV DEWI SHINTA MANGGALA-NewDocument1 pageShip's Particulars MV DEWI SHINTA MANGGALA-Newangga andi ardiansyahNo ratings yet
- Kapal Data-DataDocument38 pagesKapal Data-DataAlamNo ratings yet
- Ageod EAW. Central Powers. Points To KnowDocument23 pagesAgeod EAW. Central Powers. Points To KnowDaniel EscovedoNo ratings yet
- VW Racing Drop and Raise Plates: VW Tech Tip VW Tech TipDocument4 pagesVW Racing Drop and Raise Plates: VW Tech Tip VW Tech Tiprodney_massieNo ratings yet
- I Bau Hamburg: Original ComponentsDocument28 pagesI Bau Hamburg: Original ComponentsCarlos DiazNo ratings yet
- Warranty & Maintenance Guide: Printed in U.S.A. 6/18 18-TCS-11472Document50 pagesWarranty & Maintenance Guide: Printed in U.S.A. 6/18 18-TCS-11472Hay NakuNo ratings yet
- Perancangan Sistem Informasi Geografis Perlengkapan Jalan Berbasis Daerah Rawan KecelakaanDocument9 pagesPerancangan Sistem Informasi Geografis Perlengkapan Jalan Berbasis Daerah Rawan KecelakaanAlya ArhamNo ratings yet
- Andhra Pradesh State Road Transport Corporation: Online - Support@apsrtconline - inDocument1 pageAndhra Pradesh State Road Transport Corporation: Online - Support@apsrtconline - inManikandan100% (1)
- 392 - 1000HRSDocument2 pages392 - 1000HRSManutenção Base AnápolisNo ratings yet
- Item 702Document18 pagesItem 702Art AV B LimNo ratings yet
- Karakteristik Campuran Beton Aspal (Ac-Wc) Dengan Menggunakan Variasi Kadar Filler Abu Terbang Batu BaraDocument23 pagesKarakteristik Campuran Beton Aspal (Ac-Wc) Dengan Menggunakan Variasi Kadar Filler Abu Terbang Batu BaraArsalia InsyiraaNo ratings yet
- TicketDocument1 pageTicketvikas babuNo ratings yet
- Mmel 212 - 412Document65 pagesMmel 212 - 412agripinaluzmilaaNo ratings yet
- DBR StationDocument32 pagesDBR Stationamit ralkarNo ratings yet
- Black Bolts Screws and Nuts - : Specification ForDocument22 pagesBlack Bolts Screws and Nuts - : Specification FordoyenofcastleNo ratings yet
- B737-800 KuizDocument3 pagesB737-800 Kuizkairol nizam bin mansorNo ratings yet
- S & D MahindraDocument14 pagesS & D MahindraPriyanshu SharmaNo ratings yet
- Fabrication Erection and Installation Procedure For PipingDocument35 pagesFabrication Erection and Installation Procedure For Pipingmohd as shahiddin jafri100% (1)
- Kramer 880Document2 pagesKramer 880Олег СимоновNo ratings yet
- Gas Power CyclesDocument19 pagesGas Power CyclesMa. Monica ConsulNo ratings yet
- VW - Frezone NewDocument2,539 pagesVW - Frezone NewCOSA PARTSNo ratings yet
- 8.control Arm - WDocument50 pages8.control Arm - WEleazar PavonNo ratings yet
- DHS 15apDocument14 pagesDHS 15apadelNo ratings yet
- Assignment 2 EOT 1032Document5 pagesAssignment 2 EOT 1032Rajbir SinghNo ratings yet
- Race Schedule DataDocument4 pagesRace Schedule DataAvelino SumaguiNo ratings yet
- Rineer Hydraulics Inc, Specifications PDFDocument2 pagesRineer Hydraulics Inc, Specifications PDFTulio Andres CoyNo ratings yet
- WayBill Number 228406907Document2 pagesWayBill Number 228406907hasan arbiNo ratings yet
- Sibiu "Liqui Moly" Rally Official FIA Stage Classification Stage Ss 16 'Ss Liqui Moly Ii' Lenght 4 KmsDocument2 pagesSibiu "Liqui Moly" Rally Official FIA Stage Classification Stage Ss 16 'Ss Liqui Moly Ii' Lenght 4 KmsIvanBillNo ratings yet
- Railways-PTLOC CHistoryScrn PDFDocument2 pagesRailways-PTLOC CHistoryScrn PDFmarcusNo ratings yet