Download as pdf or txt
You might also like
- Agrokid 210 220 230 240 WSM PDFDocument488 pagesAgrokid 210 220 230 240 WSM PDFjwd80% (5)
- Cable Sizing CalculationDocument15 pagesCable Sizing CalculationMaloni0193% (14)
- Scania P, G, R, T Series Workshop Manual - Removing The Radiator Part 4Document10 pagesScania P, G, R, T Series Workshop Manual - Removing The Radiator Part 4musharrfNo ratings yet
- Class 12 Physics Project On Full Wave Bridge RectifierDocument14 pagesClass 12 Physics Project On Full Wave Bridge RectifierVaibhavPal75% (96)
- Water Specialist WS2H and WS3 Control Valve Programming and Wiring ManualDocument32 pagesWater Specialist WS2H and WS3 Control Valve Programming and Wiring ManualIsaac MendibleNo ratings yet
- Users Manual: SN1676-1CB Canbus Control SystemDocument26 pagesUsers Manual: SN1676-1CB Canbus Control Systemابراهيم حافظNo ratings yet
- ECOS System OverviewDocument57 pagesECOS System Overviewgaby100% (4)
- EMCP II P Application Notes Rev 10Document13 pagesEMCP II P Application Notes Rev 10Taz Uddin100% (3)
- Dkg-209 Automatic Mains Failure UnitDocument53 pagesDkg-209 Automatic Mains Failure UnitAnonymous V9fdC6No ratings yet
- EPower - Datasheet (All Range) HA033671 Issue 1Document22 pagesEPower - Datasheet (All Range) HA033671 Issue 1Erlangga LutfiNo ratings yet
- Man Duostart GB 01Document22 pagesMan Duostart GB 01bbaboomNo ratings yet
- EN IT Parallel Installation Guide v2.0Document25 pagesEN IT Parallel Installation Guide v2.0simonNo ratings yet
- Method Statement - Installation of Transformers and E-House Rev 01Document13 pagesMethod Statement - Installation of Transformers and E-House Rev 01amakiri Tamunoimama100% (2)
- Manual GenconDocument97 pagesManual GenconBruno MarianoNo ratings yet
- Handbook For LHB Coach Wheel Slide Protection and Controlled Discharge Toilet SystemDocument28 pagesHandbook For LHB Coach Wheel Slide Protection and Controlled Discharge Toilet SystemMUZZAMMILSHERIFF89% (9)
- BeoSound6_service-engDocument32 pagesBeoSound6_service-engJacek GaluszczynskiNo ratings yet
- MVFCL Redundancy Testing PDFDocument13 pagesMVFCL Redundancy Testing PDFfreddyjoertyNo ratings yet
- Generator Circuit Breaker Control.: TerbergDocument9 pagesGenerator Circuit Breaker Control.: TerbergyousufNo ratings yet
- Troubleshooting From I571-E2-03 G5 (AP)Document25 pagesTroubleshooting From I571-E2-03 G5 (AP)ImamNo ratings yet
- Dkg-329 Automatic Transfer Switch Controller: With Uninterrupted Transfer and Multiple Genset SupportDocument43 pagesDkg-329 Automatic Transfer Switch Controller: With Uninterrupted Transfer and Multiple Genset SupportJermaine PeñaNo ratings yet
- Load Cell User ManualDocument20 pagesLoad Cell User ManualSetianiNo ratings yet
- 329 - 2G - User DatakonDocument45 pages329 - 2G - User DatakonJermaine PeñaNo ratings yet
- EN-eng 12A1 Breaker-Control-Configuration-Gen-CbDocument9 pagesEN-eng 12A1 Breaker-Control-Configuration-Gen-CbSreepriodas RoyNo ratings yet
- Manual US DeyeDocument56 pagesManual US DeyeRoman Mikhail Pak Balitskiy100% (1)
- L&T SolutionsDocument7 pagesL&T Solutionsng_rupendraprasadNo ratings yet
- 【b】30240301001390 使用说明书 储能单相 sun (12 16) k sg01lp1 eu 德业英文 封面彩印 封面封底157g 内页70g铜版纸 142.5x210mm ver2.2Document48 pages【b】30240301001390 使用说明书 储能单相 sun (12 16) k sg01lp1 eu 德业英文 封面彩印 封面封底157g 内页70g铜版纸 142.5x210mm ver2.2Fajar Alam PriambudyNo ratings yet
- Solis Manual S6-EH1P3-8K-L-PRO EUR V1.020230428Document68 pagesSolis Manual S6-EH1P3-8K-L-PRO EUR V1.020230428l4522766No ratings yet
- Solis Manual s6 Eh1p3 8k L Pro Eur v1120240311Document75 pagesSolis Manual s6 Eh1p3 8k L Pro Eur v1120240311solarwinpowrunltdNo ratings yet
- Design, Implementation and Test Results of A Robust Control Method For A Powered Ankle Foot Orthosis (AFO)Document6 pagesDesign, Implementation and Test Results of A Robust Control Method For A Powered Ankle Foot Orthosis (AFO)jose diazNo ratings yet
- Emotron Syncoption Instruction 01-5828-01r1.enDocument28 pagesEmotron Syncoption Instruction 01-5828-01r1.enhadiNo ratings yet
- Transformer Fault Detection Using Zigbee and GSMDocument46 pagesTransformer Fault Detection Using Zigbee and GSMIrfan Baig100% (1)
- RH850/F1x 100-Pin RH850/R1x 100-PinDocument35 pagesRH850/F1x 100-Pin RH850/R1x 100-Pinmurtadha 2016No ratings yet
- 【b】储能三相说明书sun 8 12k sg01lp3 ver2.0 deyeDocument43 pages【b】储能三相说明书sun 8 12k sg01lp3 ver2.0 deyeMohammed Abdullah AwadhNo ratings yet
- hawker_lifetech_modular_instructions_english_0521Document4 pageshawker_lifetech_modular_instructions_english_0521ghpatrasNo ratings yet
- Av00 0074enDocument8 pagesAv00 0074enbayursanNo ratings yet
- Sistema Trifasico y Paralelo VEBusDocument6 pagesSistema Trifasico y Paralelo VEBusAlonso CervantesNo ratings yet
- Technical Spec - GeneratorsDocument19 pagesTechnical Spec - Generatorsmik786.znNo ratings yet
- LA SA Cheatsheet For Calculating RatingsDocument10 pagesLA SA Cheatsheet For Calculating RatingssnclgsraoNo ratings yet
- Safe Work Method of Statement For Testing and Commissioning of Diesel GeneratorsDocument9 pagesSafe Work Method of Statement For Testing and Commissioning of Diesel GeneratorsHumaid ShaikhNo ratings yet
- IGS NT 3 9 0 New FeaturesDocument21 pagesIGS NT 3 9 0 New Featuresandrea8031No ratings yet
- 329 User DizelDocument43 pages329 User DizelандрейNo ratings yet
- Gek 91718Document14 pagesGek 91718mauricio suarezNo ratings yet
- 【b】30240301001283 使用说明书 储能单相 sun (5 8) k sg01lp1 us eu 德业英文Document56 pages【b】30240301001283 使用说明书 储能单相 sun (5 8) k sg01lp1 us eu 德业英文nguyenvancuong12051999No ratings yet
- STS 116 MCSA Report-J200628Document21 pagesSTS 116 MCSA Report-J200628Haitham YoussefNo ratings yet
- VAMP 121/VAMP 121D: Arc Flash Protection UnitDocument26 pagesVAMP 121/VAMP 121D: Arc Flash Protection UnitAn Trần Huỳnh PhúNo ratings yet
- UniOP Instalation GuideDocument63 pagesUniOP Instalation Guidezvonkomihajlovic4891No ratings yet
- Etacon Brochure PDFDocument8 pagesEtacon Brochure PDFVeeraa PasupuletiNo ratings yet
- Voltage DroopDocument4 pagesVoltage Droopvictor laraNo ratings yet
- Owner'S Manual: Manual de Usuario Manual Do UsuárioDocument32 pagesOwner'S Manual: Manual de Usuario Manual Do UsuáriofelipizilNo ratings yet
- Isolation Fault TroubleshootingDocument9 pagesIsolation Fault Troubleshootingrihan.mNo ratings yet
- Week 5Document13 pagesWeek 5Qadriyyah RazaviyyahNo ratings yet
- DKG 705 UserDocument22 pagesDKG 705 UsermxnoxnNo ratings yet
- ELFA Technical DescriptionDocument14 pagesELFA Technical DescriptionLuis Franco RiosNo ratings yet
- Pact Series: Service Interface For Masterpact NT/NW, Compact NS, and Powerpact P-, R-Frame Circuit BreakersDocument10 pagesPact Series: Service Interface For Masterpact NT/NW, Compact NS, and Powerpact P-, R-Frame Circuit BreakersMohamad MakramNo ratings yet
- Lotus2ZZ PNP ManualDocument18 pagesLotus2ZZ PNP ManuallukaszNo ratings yet
- Mpalt006 Lifetech Modular Instruction Asia enDocument8 pagesMpalt006 Lifetech Modular Instruction Asia enДмитро СелютінNo ratings yet
- 200807 TECHCROSS AS점검매뉴얼 ENG 200903 (최종)Document80 pages200807 TECHCROSS AS점검매뉴얼 ENG 200903 (최종)Максим КарташовNo ratings yet
- Oly Changeover SystemsDocument5 pagesOly Changeover SystemsCandiano PopescuNo ratings yet
- Delomatic 3 Data Sheet 4921240164 UkDocument2 pagesDelomatic 3 Data Sheet 4921240164 Ukdali.marouenNo ratings yet
- Manual Sun (5 12) K sg04lp3 Au Deye 1Document53 pagesManual Sun (5 12) K sg04lp3 Au Deye 1Irfan RisaldiNo ratings yet
- 【b】30240301001287 使用说明书 储能三相 sun (25 50) k sg01hp3 - 221103 - 190919Document53 pages【b】30240301001287 使用说明书 储能三相 sun (25 50) k sg01hp3 - 221103 - 190919Mohammed Abdullah AwadhNo ratings yet
- 【b】30240301001287 使用说明书 储能三相 sun (25 50) k sg01hp3 - 240311 - 201912Document52 pages【b】30240301001287 使用说明书 储能三相 sun (25 50) k sg01hp3 - 240311 - 201912Alexis ArayaNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- GMK Carrier SteeringDocument28 pagesGMK Carrier SteeringWellington ViniciusNo ratings yet
- GMK Carrier OutriggerDocument29 pagesGMK Carrier OutriggerWellington ViniciusNo ratings yet
- EST Inputs - OutputsDocument97 pagesEST Inputs - OutputsWellington Vinicius100% (1)
- Display Features Gen 2Document36 pagesDisplay Features Gen 2Wellington ViniciusNo ratings yet
- Display Features Gen 1Document27 pagesDisplay Features Gen 1Wellington ViniciusNo ratings yet
- Dell-1708fp User's Guide En-UsDocument55 pagesDell-1708fp User's Guide En-UsFareez TaherNo ratings yet
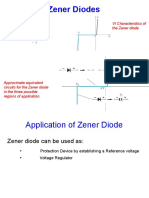
- Zener Diode AppliationsDocument19 pagesZener Diode AppliationsKartik GuptaNo ratings yet
- MTO Rigging Equipment (Sling & Shackles) - BP Tangguh ProjectDocument4 pagesMTO Rigging Equipment (Sling & Shackles) - BP Tangguh ProjectokahertaberNo ratings yet
- Evqvx: Encoders/EVQVX 10 MM Square GS EncodersDocument2 pagesEvqvx: Encoders/EVQVX 10 MM Square GS EncoderscutefrenzyNo ratings yet
- Dewalt - Acc Catalogue en MasterDocument188 pagesDewalt - Acc Catalogue en MasterМаркоNo ratings yet
- Lab 3 Three Phase Motor Rev For 10102023 014430pmDocument7 pagesLab 3 Three Phase Motor Rev For 10102023 014430pmSYED ALIYYAN IMRAN ALINo ratings yet
- Co-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionDocument6 pagesCo-Simulation of Energy Management Strategy For Hybrid Electric Vehicle in Avl InmotionConfidential SinghNo ratings yet
- SafetyDocument25 pagesSafetyflorencedago08No ratings yet
- Build A FM TransmitterDocument4 pagesBuild A FM TransmitterrastamonnNo ratings yet
- Penta KB Power kbrc240dDocument24 pagesPenta KB Power kbrc240dWilliam moreNo ratings yet
- ILI9481 v0.35Document142 pagesILI9481 v0.35Tien NguyenNo ratings yet
- VRV X & A (Catalogue)Document6 pagesVRV X & A (Catalogue)Stephanie GregasNo ratings yet
- Adeept Ultimate Kit For Arduino UNODocument143 pagesAdeept Ultimate Kit For Arduino UNOAlan Dario MazzalaiNo ratings yet
- M NG Profile Bus - DPDocument56 pagesM NG Profile Bus - DPgaikieuucNo ratings yet
- Amplivox Model 116 Operating Manual ESPDocument2 pagesAmplivox Model 116 Operating Manual ESPAlexander GutierrezNo ratings yet
- Asco ABT 300 30 To 230amp OperatorDocument19 pagesAsco ABT 300 30 To 230amp OperatorGuilherme ChiminelliNo ratings yet
- Catalog KlaussDocument5 pagesCatalog Klaussmalboro111No ratings yet
- Manual: PedelecDocument29 pagesManual: PedelecBrianNo ratings yet
- Pass Marks: - 40: Detail Syllabus For Automobile EngineerDocument7 pagesPass Marks: - 40: Detail Syllabus For Automobile EngineerSaurav AdhikariNo ratings yet
- Apple MacBook PinoutDocument2 pagesApple MacBook PinoutKélio Wolfrane Santos MachadoNo ratings yet
- F Use, Maintenance and Keeping of Air ConditionerDocument13 pagesF Use, Maintenance and Keeping of Air ConditionerBishoo ShenoudaNo ratings yet
- Errata and Addenda For Maximum MetalDocument8 pagesErrata and Addenda For Maximum Metaldaywalker44No ratings yet
- Commercial Air ConditioningDocument46 pagesCommercial Air ConditioningMohammad SaleemNo ratings yet
- Mechanical Seal Presentation (2009)Document28 pagesMechanical Seal Presentation (2009)LelosPinelos123100% (6)
- Link-Belt LS-108 Hylab 5 Hydraulic Diagram PDFDocument14 pagesLink-Belt LS-108 Hylab 5 Hydraulic Diagram PDFKOK100% (3)
- 71-20-00 PB 001 Conf 13 - Mounts - Description and OperationDocument4 pages71-20-00 PB 001 Conf 13 - Mounts - Description and OperationJack Poopay SngNo ratings yet