Download as pdf or txt
You might also like
- Marchenbilder, Op. 113 (Schumann) Formal AnalysisDocument14 pagesMarchenbilder, Op. 113 (Schumann) Formal AnalysisMilos Jovanovic75% (4)
- ARM Microcontrollers Programming for Embedded SystemsFrom EverandARM Microcontrollers Programming for Embedded SystemsRating: 5 out of 5 stars5/5 (1)
- Sistemul SIMOS 3.4 Motor ALZDocument37 pagesSistemul SIMOS 3.4 Motor ALZLucian Traian Cojocaru100% (1)
- Group 1 - UD Case Study - KaohsiungDocument35 pagesGroup 1 - UD Case Study - KaohsiungSHASHWAT PRAKHARNo ratings yet
- PID Speed Control of DC Motor Using MicrocontrollerDocument7 pagesPID Speed Control of DC Motor Using MicrocontrollerGias NawariNo ratings yet
- C1000T Lathe CNC ControllerDocument0 pagesC1000T Lathe CNC ControllerCNCmakersNo ratings yet
- Inertial Measurement and Filtering of A UAV Flight: NtroductionDocument4 pagesInertial Measurement and Filtering of A UAV Flight: NtroductionmukaNo ratings yet
- Reserch On Code of PID ControllerDocument2 pagesReserch On Code of PID Controllerashutosh raiNo ratings yet
- Quadstripped 150226205933 Conversion Gate01Document69 pagesQuadstripped 150226205933 Conversion Gate01石大明No ratings yet
- PID AlgDocument2 pagesPID AlgAheesha J VadaviNo ratings yet
- Kuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityDocument36 pagesKuka Youbot Hardware Interfaces: Jan Paulus Bonn-Rhein-Sieg UniversityLuan MoraisNo ratings yet
- 04 SpeedControlDocument5 pages04 SpeedControlAngel ChicchonNo ratings yet
- Control Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalDocument10 pagesControl Architecture For A UAV-Mounted Pan/Tilt/Roll Camera GimbalMarcio PortsNo ratings yet
- Line Follower Project ReportDocument4 pagesLine Follower Project Reporthimsboss100% (1)
- DC-Motor Speed ControllerDocument3 pagesDC-Motor Speed ControllerchakralabsNo ratings yet
- Design and Implementation of PID Controller For Motor Position ControlDocument5 pagesDesign and Implementation of PID Controller For Motor Position ControlOwais Ahmad KhanNo ratings yet
- 02 HummingbirdDocument36 pages02 Hummingbirdantenr100% (1)
- AN532 - Servo Control of A DC Brush Motor PDFDocument141 pagesAN532 - Servo Control of A DC Brush Motor PDFpierdonneNo ratings yet
- 02 PIDcontroller PDFDocument5 pages02 PIDcontroller PDFZugravu AndreiNo ratings yet
- Interfacing With DC Pololu MotorDocument12 pagesInterfacing With DC Pololu MotorYash MaharajNo ratings yet
- N EOM Project Report: Fuzzy-Pid ControllerDocument35 pagesN EOM Project Report: Fuzzy-Pid ControllerAnime XNo ratings yet
- G 3512h Standard PerameterDocument46 pagesG 3512h Standard PerameterYousuf AliNo ratings yet
- New Intelilite: Single Set Gen-Set ControllerDocument4 pagesNew Intelilite: Single Set Gen-Set ControllerMaximiliano GomezNo ratings yet
- Self Balancing BotDocument14 pagesSelf Balancing BotshivimshrNo ratings yet
- Experiment FileDocument40 pagesExperiment FilePankaj SharmaNo ratings yet
- Electronica - Servo Control of A Dc-Brush Motor An532Document89 pagesElectronica - Servo Control of A Dc-Brush Motor An532Ismael 8877No ratings yet
- GTR-168CP User ManualDocument6 pagesGTR-168CP User ManualLusy NoviaanjarsariNo ratings yet
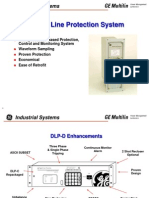
- Digital Line Protection System: Industrial SystemsDocument35 pagesDigital Line Protection System: Industrial Systemsquangspkt100% (1)
- InteliATS NT DatasheetDocument4 pagesInteliATS NT DatasheetasuhuaneNo ratings yet
- Drone PID Controller LabDocument8 pagesDrone PID Controller Labjoshimeet479No ratings yet
- Lab 3 ReportDocument33 pagesLab 3 ReportdasdasdNo ratings yet
- DC Servo Motor ControlDocument14 pagesDC Servo Motor ControlKundan NamadeNo ratings yet
- Control System Design For An Autonomous Mobile Robot: Sathish K ShanmugasundaramDocument36 pagesControl System Design For An Autonomous Mobile Robot: Sathish K Shanmugasundaramteknikpembakaran2013No ratings yet
- Tutorial - 3-Phase Inverter Control Loop DesignDocument11 pagesTutorial - 3-Phase Inverter Control Loop DesignJandfor Tansfg ErrottNo ratings yet
- Implementing A PID Controller Using A PICDocument15 pagesImplementing A PID Controller Using A PICJavier CharrezNo ratings yet
- VFD Trainer With Motor Features:: SiemensDocument6 pagesVFD Trainer With Motor Features:: Siemenshimanshu mohapatraNo ratings yet
- Day 3Document41 pagesDay 3SalmansajidNo ratings yet
- GLR SGR eDocument2 pagesGLR SGR eronald.1978No ratings yet
- Configuring The Flextimer For Position and Speed Measurement With An EncoderDocument10 pagesConfiguring The Flextimer For Position and Speed Measurement With An EncoderElias CarvalhoNo ratings yet
- STM32F3 TimersDocument75 pagesSTM32F3 TimersVport Port100% (1)
- Study of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingDocument4 pagesStudy of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingMadhusmita BeheraNo ratings yet
- ResolverDocument8 pagesResolverNishant KalbhorNo ratings yet
- Arduino PID Control Tutorial - Make Your Project SmarterDocument7 pagesArduino PID Control Tutorial - Make Your Project SmarteredeNo ratings yet
- QuadDocument55 pagesQuadVgokulGokulNo ratings yet
- Implementing A PID Controller in A Microsemi Fpga: Application Note AC303Document8 pagesImplementing A PID Controller in A Microsemi Fpga: Application Note AC303tjshelleyNo ratings yet
- BLDC Sinusoidal ControlDocument6 pagesBLDC Sinusoidal ControlOctavian MîrţiNo ratings yet
- InteliCompact NT Datasheet 2011-11 CPLEICNTDocument6 pagesInteliCompact NT Datasheet 2011-11 CPLEICNTThao Nguyen XuanNo ratings yet
- DC Motor With Encoder Manual (1.1 W)Document7 pagesDC Motor With Encoder Manual (1.1 W)Saad NajibNo ratings yet
- Datasheet DMC 630 PDFDocument8 pagesDatasheet DMC 630 PDFPaulo César CarvalhoNo ratings yet
- Digital PID Controller Using AT89C52Document1 pageDigital PID Controller Using AT89C52Manoj KavediaNo ratings yet
- DigitalLineProtection GE DLPDDocument35 pagesDigitalLineProtection GE DLPDMarcWorldNo ratings yet
- Sensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Document135 pagesSensored Field Oriented Control (FOC) of Three Phase AC Induction Motor, Texas Instruments, 2000.Ali H. NumanNo ratings yet
- PROJECTPRE OdpDocument18 pagesPROJECTPRE OdpakankshatrikhaNo ratings yet
- Sepk Lab7Document14 pagesSepk Lab7ritikgbmrcNo ratings yet
- SimCoder User ManualDocument84 pagesSimCoder User ManualAlArpeggios AzAzel NaFisNo ratings yet
- Designs of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These I o Driver CircuitsDocument5 pagesDesigns of Input and Output Driver Circuits For 16-Bit Electronic Control Unit (Ecu) and Development of Control Strategy For Ecu Using These I o Driver CircuitsesatjournalsNo ratings yet
- Dron Controller Listing ProgramDocument3 pagesDron Controller Listing ProgramAl MtdrsNo ratings yet
- Lab11 - Autotuning PDFDocument26 pagesLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiNo ratings yet
- Lab11 - AutotuningDocument26 pagesLab11 - AutotuningEng. Ebrahim A. AlrohmiNo ratings yet
- Futuristic Projects in Energy and Automation Sectors: A Brief Review of New Technologies Driving Sustainable DevelopmentFrom EverandFuturistic Projects in Energy and Automation Sectors: A Brief Review of New Technologies Driving Sustainable DevelopmentNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Advanced Techniques and Technology of Computer-Aided Feedback ControlFrom EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNo ratings yet
- Line Dance StepsheetDocument75 pagesLine Dance StepsheetBRP_LINEDANCING100% (9)
- Lvmc-Customer Service Map-1222Document1 pageLvmc-Customer Service Map-1222Preet BamrahNo ratings yet
- Kieslowski On KieslowskiDocument289 pagesKieslowski On Kieslowskim1xalis100% (4)
- Bahasa AsingDocument9 pagesBahasa AsingDARIUS DARIUSNo ratings yet
- Aesthetic of Agostino Di Scipio, by Makis SolomosDocument4 pagesAesthetic of Agostino Di Scipio, by Makis SolomosEduardo MoguillanskyNo ratings yet
- FIREscape Catalogue - IsS9 APR16 (Low Res)Document36 pagesFIREscape Catalogue - IsS9 APR16 (Low Res)GUNABALANNo ratings yet
- Age of Mythology Unit StatisticsDocument11 pagesAge of Mythology Unit Statisticsmilauhsoj93No ratings yet
- Mountain Dwarf Ranger 5 (Fey Wanderer)Document4 pagesMountain Dwarf Ranger 5 (Fey Wanderer)lerdyandpeekyNo ratings yet
- Machine & NeedleDocument7 pagesMachine & NeedleStrelitzia AugustaNo ratings yet
- Theatre of The Deaf2Document2 pagesTheatre of The Deaf2AlexandraN.GeorgianaNo ratings yet
- Sardine SoccerDocument1 pageSardine Soccershamara lNo ratings yet
- Vision IAS Prelims 2020 Test 5 QuestionsDocument18 pagesVision IAS Prelims 2020 Test 5 QuestionsVARSHA BUDHAULIANo ratings yet
- Business Proposal DGAS...Document6 pagesBusiness Proposal DGAS...Rajesh KumarNo ratings yet
- Leadership in Innovation 1194529453608858 3Document22 pagesLeadership in Innovation 1194529453608858 3shashi4u.kumar5817No ratings yet
- 2018-05-15 MS Band Concert ProgramDocument8 pages2018-05-15 MS Band Concert ProgramNorwin High School BandNo ratings yet
- Mixed Tense PracticeDocument2 pagesMixed Tense PracticeIoana MandikNo ratings yet
- 21st Century 1st Quarter2Document42 pages21st Century 1st Quarter2nekotingNo ratings yet
- Trinity Street, Stockton Picture Stockton ArchDocument3 pagesTrinity Street, Stockton Picture Stockton ArchMax DanielNo ratings yet
- Autolite Autolite Autolite: Industrial DisplayDocument6 pagesAutolite Autolite Autolite: Industrial DisplayPrashantNo ratings yet
- MU6 Aural Perception Part 1Document7 pagesMU6 Aural Perception Part 1steve kiteNo ratings yet
- Fa ChordsDocument13 pagesFa ChordsChogel Tamang100% (1)
- Peps Int 20 Definitive Portraiture To Wedding ProgramDocument13 pagesPeps Int 20 Definitive Portraiture To Wedding Programapi-235329207No ratings yet
- By Adding R' and ST' Positive Comparative SuperlativeDocument4 pagesBy Adding R' and ST' Positive Comparative SuperlativeSunnyEesuNo ratings yet
- First Name University Acceptances: UC San Diego Boise StateDocument5 pagesFirst Name University Acceptances: UC San Diego Boise StateAshley LudwigNo ratings yet
- SSt-Eclipse Model E4xx/5xx DSP-Based Digital Servo DrivesDocument3 pagesSSt-Eclipse Model E4xx/5xx DSP-Based Digital Servo DrivesRchrdStrkNo ratings yet
- Imagine FXDocument116 pagesImagine FXEurasian YamamotoNo ratings yet
- Snowball Booklet Final Final Final v2Document24 pagesSnowball Booklet Final Final Final v2api-550334603No ratings yet
- 01 - The RestaurantDocument4 pages01 - The RestaurantsuzyNo ratings yet