Download as pdf or txt
You might also like
- DLL Heat and Temperature - SUPERFIVEDocument8 pagesDLL Heat and Temperature - SUPERFIVEKATHRYN CENTINALES67% (3)
- Solid State DC Drives Part1 PDFDocument72 pagesSolid State DC Drives Part1 PDFGopi Krishnan100% (2)
- Viscosity by Efflux TimeDocument3 pagesViscosity by Efflux TimeAmit Jharbade67% (3)
- Induction Motor GK DubeyDocument13 pagesInduction Motor GK Dubeysakshamnegi40069No ratings yet
- Unit - 2 SSDDocument85 pagesUnit - 2 SSDAkshat SaxenaNo ratings yet
- Unit 2Document72 pagesUnit 2Amar Hain HumNo ratings yet
- Electric DrivesDocument32 pagesElectric DrivessangsangicnuNo ratings yet
- Chapter 3-3Document19 pagesChapter 3-3Blue BerryNo ratings yet
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Document22 pagesGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNo ratings yet
- Special Topics: Islamic Azad University Isfahan (Khorasgan) BranchDocument19 pagesSpecial Topics: Islamic Azad University Isfahan (Khorasgan) BranchAli HusseinNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking MethodsRukkuArunNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument54 pagesChapter 2 Det50063 - Speed Control of DC MotorFara Fara100% (1)
- 4th Module 2Document11 pages4th Module 2dilja aravindanNo ratings yet
- DC Motor Speed Control: Bayan University For Science & TechnologyDocument12 pagesDC Motor Speed Control: Bayan University For Science & TechnologyAltayeb AbdulhameedNo ratings yet
- DC MachinesDocument31 pagesDC MachinesBlesson RoyNo ratings yet
- DC Motors and Generators Chapter # 9Document13 pagesDC Motors and Generators Chapter # 9SamiNo ratings yet
- XLecture 7 - DC DrivesDocument29 pagesXLecture 7 - DC DrivesমোঃওমরফারুকNo ratings yet
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocument3 pagesSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Impact of Power Electronics On Electrical System DesignDocument29 pagesImpact of Power Electronics On Electrical System Designanandjoy4uNo ratings yet
- ET Lecture On 11-05-2021 & 12-05-2021Document23 pagesET Lecture On 11-05-2021 & 12-05-2021balajiNo ratings yet
- Speed Control of MotorDocument5 pagesSpeed Control of MotorPrabuddha ChakrabortyNo ratings yet
- Modern VVVF DrivesDocument5 pagesModern VVVF DrivesJohn BackmanNo ratings yet
- AED Notes SECTION BDocument8 pagesAED Notes SECTION BShivam RaiNo ratings yet
- Speed Control of DC MotorDocument19 pagesSpeed Control of DC MotorVijaya LakshmiNo ratings yet
- Speed Control of DC MotorDocument18 pagesSpeed Control of DC Motorkrishnareddy_chintalaNo ratings yet
- DC Motors Starters and Breaking MethodsDocument25 pagesDC Motors Starters and Breaking Methodskrishnareddy_chintalaNo ratings yet
- Lecture 6Document31 pagesLecture 6amanuel abrehaNo ratings yet
- Part - 9 - DC Machine - Part - 4 - Control MotorDocument18 pagesPart - 9 - DC Machine - Part - 4 - Control MotorAyyub Dhimastara AjiNo ratings yet
- Fig. 2 (A) Self Excited Induction GeneratorDocument7 pagesFig. 2 (A) Self Excited Induction GeneratorLaxmikant BagaleNo ratings yet
- Em 1 TestingDocument13 pagesEm 1 TestingAravindNo ratings yet
- Chapter 2 Det50063 - Speed Control of DC MotorDocument53 pagesChapter 2 Det50063 - Speed Control of DC MotorKuhaanProNo ratings yet
- Speed Control of DC Motor-SLIDEDocument24 pagesSpeed Control of DC Motor-SLIDEMASOUDNo ratings yet
- DC Motor S: Anand 08338958770Document79 pagesDC Motor S: Anand 08338958770Rohit AvasthiNo ratings yet
- Speed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlDocument8 pagesSpeed Control of DC Shunt Motor: A) Field Current Control B) Armature Voltage ControlAkshit VSNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Square Wave Voltage Source Inverter Fed InductionDocument4 pagesSquare Wave Voltage Source Inverter Fed Induction5049 SUSEENTHIRAN ANo ratings yet
- Unit-IV Speed Control of Induction Motor On Rotor SideDocument8 pagesUnit-IV Speed Control of Induction Motor On Rotor SideMohammed MateenNo ratings yet
- Eee206 DC Motor p1bDocument3 pagesEee206 DC Motor p1bAhad AhadNo ratings yet
- Class DutyDocument58 pagesClass DutyHarsha AnantwarNo ratings yet
- ECNG-4010 Lecture 05Document37 pagesECNG-4010 Lecture 05Abel BatuNo ratings yet
- Lecture No 3Document33 pagesLecture No 3Walid salamaNo ratings yet
- Power Electronics Chapter 2-2: Applications of Semiconductor DevicesDocument18 pagesPower Electronics Chapter 2-2: Applications of Semiconductor DevicestesfuNo ratings yet
- Constructional Project: 'FeaturesDocument2 pagesConstructional Project: 'FeaturesBimoo Chandra Bimantara PutraNo ratings yet
- Self Excited Induction GeneratorDocument6 pagesSelf Excited Induction Generatorayash mohantyNo ratings yet
- Ed Mod5Document29 pagesEd Mod5AlphaBravoNo ratings yet
- Question No 1: Speed Control of DC MotorDocument10 pagesQuestion No 1: Speed Control of DC MotorProxima YusNo ratings yet
- PSD..UNIT 3..motor DrivesDocument38 pagesPSD..UNIT 3..motor Drivessatish reddyNo ratings yet
- Speed Control of Three Phase Induction MotorDocument25 pagesSpeed Control of Three Phase Induction MotorTrios TECHNOLOGIESNo ratings yet
- DC Motors Starting MethodsDocument6 pagesDC Motors Starting MethodsSai Teja KondraNo ratings yet
- Speed Control of Induction Motors - 2 PDFDocument22 pagesSpeed Control of Induction Motors - 2 PDFZariz ZakianNo ratings yet
- Apnot 125Document4 pagesApnot 125wilson2142No ratings yet
- Unit Ii Drive ChaacteristicsDocument26 pagesUnit Ii Drive Chaacteristicssaravanakmar vNo ratings yet
- Load Frequency Control LFCPower System Operation ControlDocument23 pagesLoad Frequency Control LFCPower System Operation Controlsaifur rahmanNo ratings yet
- Speeed ControlDocument3 pagesSpeeed ControlChristine GomezNo ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Induction Motor BrakingDocument26 pagesInduction Motor BrakingAshwini Singh100% (3)
- 637 - 2024 Lab-5 Synchronous MachinesDocument13 pages637 - 2024 Lab-5 Synchronous Machineseren.alliNo ratings yet
- Speed Control of 3 Phase Slip Ring Induction MotorDocument2 pagesSpeed Control of 3 Phase Slip Ring Induction Motoraditya aryaNo ratings yet
- Synchronous Motor DrivesDocument17 pagesSynchronous Motor DrivessidharthNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Chapter 4 - Induction Motor Drives - Part1 - AddDocument46 pagesChapter 4 - Induction Motor Drives - Part1 - AddZafirah HanafiNo ratings yet
- Chapter 4 - Induction Motor Drives - Part1Document45 pagesChapter 4 - Induction Motor Drives - Part1Zafirah HanafiNo ratings yet
- Chapter 3 - Power Electronics Converters For DC Motor Drives - Part1Document22 pagesChapter 3 - Power Electronics Converters For DC Motor Drives - Part1Zafirah HanafiNo ratings yet
- DC Motor Drives (Switched Mode Converter)Document23 pagesDC Motor Drives (Switched Mode Converter)Zafirah HanafiNo ratings yet
- Chapter 2 Energy Management System Part 1Document74 pagesChapter 2 Energy Management System Part 1Zafirah HanafiNo ratings yet
- Introduction To Electrical DrivesDocument71 pagesIntroduction To Electrical DrivesZafirah HanafiNo ratings yet
- Chapter 2 Energy Management System Part 2Document32 pagesChapter 2 Energy Management System Part 2Zafirah HanafiNo ratings yet
- Chapter 1 Introduction To Energy EfficiencyDocument54 pagesChapter 1 Introduction To Energy EfficiencyZafirah HanafiNo ratings yet
- Key Words: Stress Concentrations Stroh Formalism Piezo-Electric Laminates Symmetric, Unsymmetric Laminates Coupled Electromechanical Loading Inplane and Bending LoadsDocument29 pagesKey Words: Stress Concentrations Stroh Formalism Piezo-Electric Laminates Symmetric, Unsymmetric Laminates Coupled Electromechanical Loading Inplane and Bending LoadsDr.D.K.Nageswara RaoNo ratings yet
- EE340 Week1 Ch1 AhmedDocument62 pagesEE340 Week1 Ch1 AhmedMuhannad BedaiwiNo ratings yet
- 2798 Astm D - 2020Document6 pages2798 Astm D - 2020M0197 BatenkhNo ratings yet
- 2019-SOL-APA-2B - Liquids, POM, Thermodynamics, SHM, WavesDocument12 pages2019-SOL-APA-2B - Liquids, POM, Thermodynamics, SHM, WavesHemendra PrasannaNo ratings yet
- NEWKer 18imi Series Controller Installation GuideDocument12 pagesNEWKer 18imi Series Controller Installation GuideElenilton MelchiorsNo ratings yet
- 2A AM-FAME-AMIS MicroProp Functional Volpi 2023-2024Document52 pages2A AM-FAME-AMIS MicroProp Functional Volpi 2023-2024Moiz AmirNo ratings yet
- An Ultra-Broadband and Optically Transparent Metamaterial Absorber Based On Multilayer Indium-Tin-Oxide Structure-2021Document8 pagesAn Ultra-Broadband and Optically Transparent Metamaterial Absorber Based On Multilayer Indium-Tin-Oxide Structure-2021reza mirzakhaniNo ratings yet
- Evaluation of The Nonlinear Properties of SoilDocument16 pagesEvaluation of The Nonlinear Properties of SoilSafwat El RoubyNo ratings yet
- Conversion From Latitude/Longitude To Cartesian CoordinatesDocument34 pagesConversion From Latitude/Longitude To Cartesian CoordinatesMinaAdlyNo ratings yet
- Merkel PTFE U-Rings: For High Level ApplicationsDocument20 pagesMerkel PTFE U-Rings: For High Level ApplicationskazemiNo ratings yet
- Lecture Industrial Robots - 2017 - FundamentalDocument53 pagesLecture Industrial Robots - 2017 - FundamentalĐình TrungNo ratings yet
- Xerox 5915 Service ManualDocument146 pagesXerox 5915 Service Manualmehdi_palangiNo ratings yet
- Quantum InformationDocument6 pagesQuantum Informationyout ubeNo ratings yet
- Design of Buried Pipeline Block AnchorDocument2 pagesDesign of Buried Pipeline Block Anchoragung_gpeNo ratings yet
- HQ002EN Balinit® HELICADocument4 pagesHQ002EN Balinit® HELICAMari BraatzNo ratings yet
- Normal Distribution of Statistics and Probability and Basic Calculus - Continuity of FunctionsDocument4 pagesNormal Distribution of Statistics and Probability and Basic Calculus - Continuity of FunctionsAlt GakeNo ratings yet
- University of Manchester MSC Dissertation GuidelinesDocument6 pagesUniversity of Manchester MSC Dissertation GuidelinesBuyPsychologyPapersSingaporeNo ratings yet
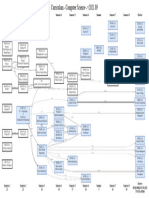
- Curriculum - Computer Science - v2021.89Document1 pageCurriculum - Computer Science - v2021.8927.Nguyễn Trung Nguyên 12a17No ratings yet
- Specs Muscenone® Firmenich 962191 (Muscenone Delta)Document1 pageSpecs Muscenone® Firmenich 962191 (Muscenone Delta)路人甲No ratings yet
- CE Board Nov 2020 - RCD - Set 3 MonoDocument2 pagesCE Board Nov 2020 - RCD - Set 3 MonoDale MalazzabNo ratings yet
- Quantity Unit Abbreviation: SI UnitsDocument2 pagesQuantity Unit Abbreviation: SI UnitsST - Roselyn BellezaNo ratings yet
- Quantitative Interpretation of The Response of Surface Plasmon Resonance Sensors To Adsorbed FilmsDocument13 pagesQuantitative Interpretation of The Response of Surface Plasmon Resonance Sensors To Adsorbed FilmsKaren Régules MedelNo ratings yet
- Free Download Electric Vehicle Engineering 1St Edition Enge Full Chapter PDFDocument51 pagesFree Download Electric Vehicle Engineering 1St Edition Enge Full Chapter PDFjames.alonso405100% (25)
- Constant Head Permeability TestDocument8 pagesConstant Head Permeability TestcursostangNo ratings yet
- Cyber Exploration Laboratory 1: Semeniano, Hubert BDocument1 pageCyber Exploration Laboratory 1: Semeniano, Hubert BHubert SemenianoNo ratings yet
- Regression Practice Questions 2024Document3 pagesRegression Practice Questions 2024Brian SamendeNo ratings yet
- Online Homework 8Document5 pagesOnline Homework 8Hoang PhuonghaNo ratings yet
- Transverse Waves Worksheet Given 2021Document2 pagesTransverse Waves Worksheet Given 2021llekhanya-1No ratings yet