Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5834)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Introdution To Information TechnologyDocument81 pagesIntrodution To Information TechnologyPratibha Jha100% (1)
- Bosch Integrated Circuits Part NumbersDocument7 pagesBosch Integrated Circuits Part NumbersSzekelyGobeNo ratings yet
- Control Engineering and Automation LD PDF CatalogueDocument100 pagesControl Engineering and Automation LD PDF CatalogueIvan David SmithNo ratings yet
- Optimal PID Controller Design For DC Motor Speed Control System With Tracking and Regulating Constrained Optimization Via Cuckoo SearchDocument8 pagesOptimal PID Controller Design For DC Motor Speed Control System With Tracking and Regulating Constrained Optimization Via Cuckoo SearchIvan David SmithNo ratings yet
- Instruction Sheet 734 064: PID-Digital Controller (734 064)Document3 pagesInstruction Sheet 734 064: PID-Digital Controller (734 064)Ivan David SmithNo ratings yet
- Speed Control of DC Motor Using Pid ControllerDocument4 pagesSpeed Control of DC Motor Using Pid ControllerIvan David Smith100% (1)
- BPW43Document5 pagesBPW43pome14No ratings yet
- Es SyllabusDocument56 pagesEs SyllabusmanoshamnairNo ratings yet
- A New Technique For Measuring Ferrite Core Loss Under DC Bias ConditionsDocument4 pagesA New Technique For Measuring Ferrite Core Loss Under DC Bias Conditionsshekhar.mnnitNo ratings yet
- Automatic Voltage Regulator For Synchronous GeneratorDocument7 pagesAutomatic Voltage Regulator For Synchronous GeneratorGnanaseharan ArunachalamNo ratings yet
- LTE Performance Optimization - White PaperDocument6 pagesLTE Performance Optimization - White PaperRafi AnsariNo ratings yet
- OSN 8800 6800 3800 V100R006C03 Installing, Operating and Maintaining Your Network (For Field Engineer) 01Document652 pagesOSN 8800 6800 3800 V100R006C03 Installing, Operating and Maintaining Your Network (For Field Engineer) 01Derrick Senyo100% (3)
- Program Instruction Memory Central Processing Unit BootupDocument4 pagesProgram Instruction Memory Central Processing Unit BootupADSR100% (1)
- Typical Digital Signal Processing Operations!: Prof. Shankar Prakriya! Indian Institute of Technology, Delhi!Document36 pagesTypical Digital Signal Processing Operations!: Prof. Shankar Prakriya! Indian Institute of Technology, Delhi!Pranav RavalNo ratings yet
- Study of Logic GatesDocument26 pagesStudy of Logic GatesArial96No ratings yet
- 1introduction To Amplitude Modulation (AM)Document70 pages1introduction To Amplitude Modulation (AM)Rennie KawanguNo ratings yet
- Hualogeleboufes E NTTS: ExplainDocument63 pagesHualogeleboufes E NTTS: ExplainFairoz FairozNo ratings yet
- RF Based Bus Stop Announcement SystemDocument43 pagesRF Based Bus Stop Announcement SystemSaravanan Viswakarma100% (1)
- Maintenance Manual: Stereo Power AmplifierDocument4 pagesMaintenance Manual: Stereo Power AmplifierStefanoViganóNo ratings yet
- MotherboardDocument15 pagesMotherboardJannet Francia Ong Sorreta100% (2)
- Features Types: MPL8.48/MPL8.46Document1 pageFeatures Types: MPL8.48/MPL8.46David Villamarin RiveraNo ratings yet
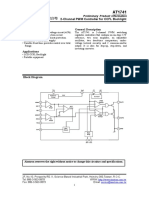
- 2-Channel PWM Controller For CCFL Backlight: Preliminary Product InformationDocument11 pages2-Channel PWM Controller For CCFL Backlight: Preliminary Product InformationMorales Avila NiorgeNo ratings yet
- EE 06 Correlation Problems Part III v1 9-1-16Document4 pagesEE 06 Correlation Problems Part III v1 9-1-16ArjunneNo ratings yet
- 2144 Protomat E33Document4 pages2144 Protomat E33josioneNo ratings yet
- Ohmega BrochureDocument12 pagesOhmega Brochurevenkat_060No ratings yet
- American International University-Bangladesh (AIUB) Faculty of EngineeringDocument11 pagesAmerican International University-Bangladesh (AIUB) Faculty of EngineeringAbeer HussainNo ratings yet
- CTC 185 Power SupplyDocument8 pagesCTC 185 Power SupplyDavid AparicioNo ratings yet
- Helical Antenna PresentationDocument17 pagesHelical Antenna Presentationjenath10% (1)
- EE370 Lab Experiment 07Document3 pagesEE370 Lab Experiment 07Mustaq AhmedNo ratings yet
- Practical No - 9: Aim: Write A C Program To Implement LALR ParsingDocument5 pagesPractical No - 9: Aim: Write A C Program To Implement LALR ParsingpriyalNo ratings yet
- 3.ourside - Vip.dvr Design and Simulation Along Power Quality Improvement.2208EE004Document8 pages3.ourside - Vip.dvr Design and Simulation Along Power Quality Improvement.2208EE004ssNo ratings yet
- Display Controlmaster - BattenfeldDocument20 pagesDisplay Controlmaster - BattenfeldJosiasNo ratings yet
- User Manual 8051 Training KitDocument26 pagesUser Manual 8051 Training KitXabi AZ50% (2)
- Eband Wireless Technology Overview White Paper V051310Document12 pagesEband Wireless Technology Overview White Paper V051310Chiker YacineNo ratings yet