Download as pdf or txt
You might also like
- .Archivetempengine - ZD30DDTi Diesel Engine Maintenance ManualDocument70 pages.Archivetempengine - ZD30DDTi Diesel Engine Maintenance ManualEduardoGaleano75% (8)
- Diagrama Hidraulico 962g CaterpillarDocument4 pagesDiagrama Hidraulico 962g CaterpillarRonald Gareca Rueda100% (1)
- Schneider Electric Type 2 Co-Ordination Selection Charts-2Document4 pagesSchneider Electric Type 2 Co-Ordination Selection Charts-2rajpre1213100% (4)
- B6 - For-1Document10 pagesB6 - For-15002- Ajay.RNo ratings yet
- Mechanism KinematicsDocument4 pagesMechanism KinematicsLuis OscarNo ratings yet
- Lecture 9 - DynamicsDocument39 pagesLecture 9 - DynamicsrebortronaldNo ratings yet
- Chapter 8 Dynamics and Control of RobotsDocument30 pagesChapter 8 Dynamics and Control of RobotsSiferaw NegashNo ratings yet
- Robotics Manohar Notes Unit 3,4 & 5Document19 pagesRobotics Manohar Notes Unit 3,4 & 5Johnson PaulNo ratings yet
- KMDocument120 pagesKMsady1967No ratings yet
- Chapter # 1: Introduction To Robotics Mechanics & ControlDocument51 pagesChapter # 1: Introduction To Robotics Mechanics & ControlAli AliNo ratings yet
- Lec - 5.2 - Robotic Model AnalysisDocument33 pagesLec - 5.2 - Robotic Model AnalysisNiyamul Karim NiloyNo ratings yet
- Theme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021Document48 pagesTheme 2 (Revision) Introduction of Industrial Robot - Manipulators - Ver 1. of Doz Ivan Avramov 28 Jan 2021stanimirNo ratings yet
- Lecture 2 MechanicsDocument11 pagesLecture 2 MechanicsM. Sharjeel FarzadNo ratings yet
- ME 3507: Theory of Machines: Dr. Faraz JunejoDocument45 pagesME 3507: Theory of Machines: Dr. Faraz JunejoArsal AbbasNo ratings yet
- Unit 3 ModelingDocument8 pagesUnit 3 Modelingece.hk116No ratings yet
- LectureTwo Roboticsjoint DrWasanDocument23 pagesLectureTwo Roboticsjoint DrWasanwasan.engNo ratings yet
- Robotics IntroductionDocument22 pagesRobotics IntroductionPrashanth BnNo ratings yet
- ARKaD WS2122 L07 LagrangeDocument28 pagesARKaD WS2122 L07 LagrangeOscar CopadoNo ratings yet
- Mejias - Activtiy 7 - Control LabDocument9 pagesMejias - Activtiy 7 - Control LabLaurence MejiasNo ratings yet
- Co-Simulation of A Crank - Slider Servo Mechanism: October 2015Document8 pagesCo-Simulation of A Crank - Slider Servo Mechanism: October 2015Douai LinNo ratings yet
- Lecture 2Document30 pagesLecture 2abdul bariNo ratings yet
- Unit - 3Document6 pagesUnit - 3hemanthrevuri2002No ratings yet
- Robot Dynamics PDFDocument4 pagesRobot Dynamics PDFAlvin KiruiNo ratings yet
- Mejias - Activtiy 3 - Control LabDocument17 pagesMejias - Activtiy 3 - Control LabLaurence MejiasNo ratings yet
- Share Unit1Document65 pagesShare Unit1SHUBHAM WAGHNo ratings yet
- Module - 1Document53 pagesModule - 1Sehraj singh GothraNo ratings yet
- 00 Robotics Lec00Document14 pages00 Robotics Lec00Furkan KirmaciNo ratings yet
- Kinematics and DynamicsDocument19 pagesKinematics and DynamicsSamuel DhlaminiNo ratings yet
- KMDocument120 pagesKMsankara25101991No ratings yet
- Control Strategies and Advanced RoboticsDocument10 pagesControl Strategies and Advanced Roboticsisaacokai20No ratings yet
- Ac DC MotorDocument11 pagesAc DC Motoranuj kumarNo ratings yet
- Unit IV Robot Kinematics and Robot ProgrammingDocument23 pagesUnit IV Robot Kinematics and Robot Programminggnanasekar.mechNo ratings yet
- Csir Co4 PDFDocument100 pagesCsir Co4 PDFRam MNo ratings yet
- MMT Mod1Document107 pagesMMT Mod1cattykaif1No ratings yet
- VCS REPORT FinalDocument7 pagesVCS REPORT Finalasd108533No ratings yet
- Lecture 1Document59 pagesLecture 1iptradersNo ratings yet
- Robotic ManipulatorsDocument4 pagesRobotic Manipulatorsshaik roshanNo ratings yet
- Assessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and AutomationDocument30 pagesAssessment Criteria For Mid-Term Assessment TEQIP-III Technology Robotics and Automationdjadja nakamayaNo ratings yet
- OIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)Document10 pagesOIE 751 ROBOTICS Unit 2 Class 1 (26-8-2020)MICHEL RAJ0% (1)
- Inverted PendulumDocument18 pagesInverted PendulumLingxi HuangNo ratings yet
- Mechanisms of Machinery Blue Print ObjectivesDocument9 pagesMechanisms of Machinery Blue Print Objectiveskidusabeje7No ratings yet
- A New Approach On Stabilization Control of An InveDocument5 pagesA New Approach On Stabilization Control of An Inveseyed mohsen SalehiNo ratings yet
- ME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Document14 pagesME-309: Mechanics of Machines Spring 2011/2012: Instructor: Office: E-Mail: Catalogue Description: (3-0-3)Diala DurubiNo ratings yet
- MEC 567 Kinematic Analysis and Synthesis of Mechanisms Spring 2016Document18 pagesMEC 567 Kinematic Analysis and Synthesis of Mechanisms Spring 2016anik sarkerNo ratings yet
- Automation and Robotic Lec 2Document9 pagesAutomation and Robotic Lec 2Josh Sam Rindai MhlangaNo ratings yet
- ME3026 Dynamics Chap1 2 Merged - RemovedDocument44 pagesME3026 Dynamics Chap1 2 Merged - RemovedNguyễn Nam AnhNo ratings yet
- Mach L 1Document34 pagesMach L 1abdul bariNo ratings yet
- Lecture1 IntroductionDocument36 pagesLecture1 IntroductionelwakilwkwNo ratings yet
- Introduction To Concepts in RoboticsDocument22 pagesIntroduction To Concepts in Roboticsharikiran3285No ratings yet
- Torque Reduction For 2 Dof ManipulatorDocument5 pagesTorque Reduction For 2 Dof ManipulatorAnkit GoratelaNo ratings yet
- Unit 2 2nd PartDocument23 pagesUnit 2 2nd Partrajaganesh.c.i.dNo ratings yet
- Robot Kinematics: Robot Kinematics Applies Geometry To The Study of The MovementDocument3 pagesRobot Kinematics: Robot Kinematics Applies Geometry To The Study of The MovementKrishanu ModakNo ratings yet
- Mechanotrix 1Document37 pagesMechanotrix 1Mansif HossainNo ratings yet
- Control System Engineering PPT by ShemsudinDocument42 pagesControl System Engineering PPT by ShemsudinShemsudin AhmedteibNo ratings yet
- Dr. Sidra Khanam Assistant Professor Department of Mechanical Engineering Aligarh Muslim UniversityDocument33 pagesDr. Sidra Khanam Assistant Professor Department of Mechanical Engineering Aligarh Muslim UniversityAmir Mahmoud Mahdavi Abhari100% (1)
- Saber PhdthesisDocument307 pagesSaber PhdthesisszepesvaNo ratings yet
- A New Approach On Stabilization Control of An InveDocument6 pagesA New Approach On Stabilization Control of An InveHưng Nguyễn Trần NhựtNo ratings yet
- PUMA-560 Robot Manipulator Position Sliding Mode Control Methods Using MATLAB/SIMULINK and Their Integration Into Graduate/Undergraduate Nonlinear Control, Robotics and MATLAB CoursesDocument45 pagesPUMA-560 Robot Manipulator Position Sliding Mode Control Methods Using MATLAB/SIMULINK and Their Integration Into Graduate/Undergraduate Nonlinear Control, Robotics and MATLAB CoursesAI Coordinator - CSC JournalsNo ratings yet
- Evolvable Mechanics Hardware Tools For Evolutionary RoboticsDocument7 pagesEvolvable Mechanics Hardware Tools For Evolutionary Roboticsdinu petreNo ratings yet
- AcfDocument5 pagesAcfShubhamNo ratings yet
- Exp 5 Head Loss Due To FrictionDocument17 pagesExp 5 Head Loss Due To FrictionnileshNo ratings yet
- Installers Manual ING 2010Document161 pagesInstallers Manual ING 2010Aminu IbrahimNo ratings yet
- SM Xc500carbDocument350 pagesSM Xc500carbRadulf PugnusNo ratings yet
- Toyota LC HZJ78 02 CL ClutchDocument4 pagesToyota LC HZJ78 02 CL Clutchyannis.spinnerNo ratings yet
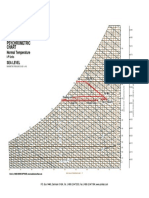
- AHU 3 PsychrometricDocument1 pageAHU 3 PsychrometricIzaaz AhamedNo ratings yet
- Rotor DynamicsDocument5 pagesRotor DynamicsavciayNo ratings yet
- Lab Report 6 Saaim Ahmed - 417524Document9 pagesLab Report 6 Saaim Ahmed - 417524Zain AhmedNo ratings yet
- States of Matter - Solutions and MixturesDocument25 pagesStates of Matter - Solutions and MixturesYasinth ThivagarNo ratings yet
- METEOR 350 - UK UpdatedDocument2 pagesMETEOR 350 - UK UpdatedMeka MekarnikasNo ratings yet
- Buoyancy ProblemsDocument4 pagesBuoyancy ProblemsKeinth JosephNo ratings yet
- Oisd STD 139 (Old)Document10 pagesOisd STD 139 (Old)Ravikumar mahadevNo ratings yet
- Experiment No. 01: DR D Y Patil School of Engineering & TechnologyDocument4 pagesExperiment No. 01: DR D Y Patil School of Engineering & Technologypradnya sadigaleNo ratings yet
- Case Study of Twin Cable-Stayed Bridges For High-Speed Railway in China: Design, Analysis and ConstructionDocument7 pagesCase Study of Twin Cable-Stayed Bridges For High-Speed Railway in China: Design, Analysis and Constructionkirti jadhavNo ratings yet
- Twin Clutch TransmissionDocument237 pagesTwin Clutch TransmissionAkash Mankar100% (1)
- The Use of Onboard Real-Time Models For Jet Engine ControlDocument27 pagesThe Use of Onboard Real-Time Models For Jet Engine ControljoukendNo ratings yet
- UntitledDocument12 pagesUntitledFHGDTY? HNo ratings yet
- Stability and Control Iit KanpurDocument844 pagesStability and Control Iit KanpursankalpNo ratings yet
- Model 5265 Static Gel Strength Analyzer ManualDocument50 pagesModel 5265 Static Gel Strength Analyzer ManualWilsson GalindoNo ratings yet
- HCDP Danalyzerdan An 42 NGC An HDCP 700xaDocument4 pagesHCDP Danalyzerdan An 42 NGC An HDCP 700xakenangrok2009No ratings yet
- 50Hz Air Conditioners: Comfort ZoneDocument27 pages50Hz Air Conditioners: Comfort ZoneZeljko Lazarevic100% (1)
- Water Tube Package BoilerDocument12 pagesWater Tube Package Boilerravish ravindran67% (3)
- Service Bulletin A - 3.1: Technical Information To All The Owners of Sulzer A Type Diesel Engines 22.03.96Document8 pagesService Bulletin A - 3.1: Technical Information To All The Owners of Sulzer A Type Diesel Engines 22.03.96zbkt07No ratings yet
- Maintenance: Maintenance and Operation InstructionsDocument4 pagesMaintenance: Maintenance and Operation InstructionsAdnanNo ratings yet
- What Are The Differences Between Implicit and Explicit?: Weak SpringDocument2 pagesWhat Are The Differences Between Implicit and Explicit?: Weak SpringKoral ToptopNo ratings yet
- Tpi106 de UsDocument10 pagesTpi106 de UsYogesh BadheNo ratings yet
- Physics HL Worked SolutionsDocument131 pagesPhysics HL Worked SolutionsChis KutiNo ratings yet
- Presented By:-: Akshay Ts DTDM 6 SEM Roll No - 04Document23 pagesPresented By:-: Akshay Ts DTDM 6 SEM Roll No - 04Deepak RameshNo ratings yet