Download as pdf or txt
You might also like
- 04 15 2021 Basics of Automotive Ethernet Rev1.1Document71 pages04 15 2021 Basics of Automotive Ethernet Rev1.1RakshithNo ratings yet
- 2021 05 13 Teledyne LeCroy Auto ENET Compliance Webinar Rev. 1Document114 pages2021 05 13 Teledyne LeCroy Auto ENET Compliance Webinar Rev. 1Rakshith100% (1)
- Spectre RF Explorer WorkshopDocument579 pagesSpectre RF Explorer WorkshopHoang Nguyen100% (1)
- Vector Network AnalisisDocument18 pagesVector Network AnalisisHenry Lois Davila Andrade100% (1)
- Agilent AN 1287-1 Understanding The Fundamental Principles of Vector Network AnalysisDocument14 pagesAgilent AN 1287-1 Understanding The Fundamental Principles of Vector Network AnalysisaaerospaceNo ratings yet
- VNA FMR AgilentDocument15 pagesVNA FMR AgilentErickOmarBurgosParraNo ratings yet
- 7860 Ch1and2 Aug09Document90 pages7860 Ch1and2 Aug09Priyanka SinhaNo ratings yet
- Signals and SystemsDocument67 pagesSignals and Systemsyadagiri devarakondaNo ratings yet
- Spectrum Analyzer PrelabDocument11 pagesSpectrum Analyzer PrelabMohammed EllafiNo ratings yet
- Base BandDocument110 pagesBase BandMohanNo ratings yet
- Stable System:: Bilinear TransformDocument7 pagesStable System:: Bilinear TransformSulaimanNo ratings yet
- Principles of CommunicationDocument24 pagesPrinciples of CommunicationJyothirmai GarapatiNo ratings yet
- Fast Fourier Transform ReportDocument19 pagesFast Fourier Transform ReportKarabo LetsholoNo ratings yet
- Signal Integrity: by AsifDocument66 pagesSignal Integrity: by Asifsrikanth chundiNo ratings yet
- Idresss Sir#1Document11 pagesIdresss Sir#1Dil NawazNo ratings yet
- Lecture3 & 4 - Amplitude Modulation - DoneDocument73 pagesLecture3 & 4 - Amplitude Modulation - Donerizwanahmed06No ratings yet
- Introduction To Signals: Mansoor Khan EEE352 Analog Communication SystemsDocument49 pagesIntroduction To Signals: Mansoor Khan EEE352 Analog Communication Systemsali_rehman87100% (1)
- NOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksDocument13 pagesNOTES 99-4 Bandwidth, Frequency Response, and Capacity of Communication LinksengrkskNo ratings yet
- CT NotesDocument227 pagesCT NotesAnonymous ODLmPN5g100% (3)
- Chapter 0121Document10 pagesChapter 0121Venice Rome RoldanNo ratings yet
- The Phase Sensitive (Lock-In) DetectorDocument21 pagesThe Phase Sensitive (Lock-In) DetectorBert ColijnNo ratings yet
- Seismic Processing 3Document169 pagesSeismic Processing 3Temitayo Ologun100% (1)
- Bahan Kul Siskom (3,4,5)Document84 pagesBahan Kul Siskom (3,4,5)Syarif KotoNo ratings yet
- Lecture 2 - Physical LayerDocument44 pagesLecture 2 - Physical LayerBatool SajidaNo ratings yet
- Design and Implementation of Analog Multiplier SDocument29 pagesDesign and Implementation of Analog Multiplier Sjeju rajNo ratings yet
- Self Adaptive Microwave FiltersDocument4 pagesSelf Adaptive Microwave FiltersVanitha KaremollaNo ratings yet
- Building A Lock-In Amplifier PHY 312: 1. FilterDocument4 pagesBuilding A Lock-In Amplifier PHY 312: 1. FilterIvan PetrovNo ratings yet
- Lecture - 2 and 3 Winter - 2023 - 2024Document34 pagesLecture - 2 and 3 Winter - 2023 - 2024ritamonde4No ratings yet
- Oscillator Noise Analysis:: (T) Be A Noisy Signal. It Can Be Separated Into A N (T)Document12 pagesOscillator Noise Analysis:: (T) Be A Noisy Signal. It Can Be Separated Into A N (T)deepakvaj25No ratings yet
- Lecture 2Document33 pagesLecture 2marcelineparadzaiNo ratings yet
- WN Ch2 Wireless - TransmissionDocument74 pagesWN Ch2 Wireless - TransmissionPriyanka DengeNo ratings yet
- Op Power System Harmonics W. Bin Chang: 60 RadiDocument8 pagesOp Power System Harmonics W. Bin Chang: 60 RadiFabien CallodNo ratings yet
- Wireless & Mobile Communications Chapter 2: Wireless TransmissionDocument74 pagesWireless & Mobile Communications Chapter 2: Wireless TransmissionMichael Derrick OdhiamboNo ratings yet
- Communication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirDocument58 pagesCommunication System TC-307: EL, Lecture 7, Week 3 Course Instructor: Nida NasirAhmad IrfanNo ratings yet
- Data Transmission CH 2Document71 pagesData Transmission CH 2Prïñčé Äl ŜåmádNo ratings yet
- 2-FM MOD DemodDocument8 pages2-FM MOD Demodsmilyboy2904No ratings yet
- Data and Computer Communications: Tenth Edition by William StallingsDocument33 pagesData and Computer Communications: Tenth Edition by William StallingsMohamed HelmyNo ratings yet
- EMC Chap 3Document28 pagesEMC Chap 3Sasidhar Reddy VundelaNo ratings yet
- All About ModulationDocument0 pagesAll About Modulationkrtica1989No ratings yet
- C02 Wireless TransmissionDocument48 pagesC02 Wireless TransmissionTrần Thanh TùngNo ratings yet
- Fourier Transform Experiment ManualDocument10 pagesFourier Transform Experiment Manualf20212358No ratings yet
- Lecture 2-Wireless - TransmissionDocument41 pagesLecture 2-Wireless - TransmissionNashrah AnsariNo ratings yet
- CSE 315 Lecture-No.3 (Spring 2022) - Transmission Media and Channel CapacityDocument63 pagesCSE 315 Lecture-No.3 (Spring 2022) - Transmission Media and Channel CapacityShajjad Hossain ShisherNo ratings yet
- Minggu Ini - ChannelsDocument28 pagesMinggu Ini - ChannelsMuhamad ReduanNo ratings yet
- Phase Jitter: Phase Noise and Voltage Controlled Crystal OscillatorsDocument26 pagesPhase Jitter: Phase Noise and Voltage Controlled Crystal OscillatorsDhrupesh955No ratings yet
- Signals and Spectra: Chapter - 3Document29 pagesSignals and Spectra: Chapter - 3varshitaNo ratings yet
- 3-Data and SignalDocument48 pages3-Data and SignalIman FahimNo ratings yet
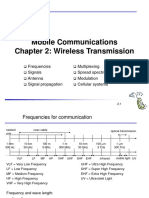
- Mobile Communications Chapter 2: Wireless TransmissionDocument41 pagesMobile Communications Chapter 2: Wireless TransmissionKevin Mauricio VelasquezNo ratings yet
- COMM1208 Unit2 SignalsDocument14 pagesCOMM1208 Unit2 SignalsidatscribdNo ratings yet
- C. Instrumentation For Electrical Bioimpedance MeasurementsDocument32 pagesC. Instrumentation For Electrical Bioimpedance MeasurementsDmitriyNo ratings yet
- Ec102: Electronics & Communication Laboratory List of ExperimentsDocument95 pagesEc102: Electronics & Communication Laboratory List of Experimentsaryan kumarNo ratings yet
- Single-Stage Amplifiers: 3.1 ApplicationsDocument8 pagesSingle-Stage Amplifiers: 3.1 ApplicationsStickJimenezHerreraNo ratings yet
- LS NA Short CourseDocument62 pagesLS NA Short CourseManuel GaytanNo ratings yet
- Reviseio CSystemeeDocument25 pagesReviseio CSystemeeRaman TrivediNo ratings yet
- Channel Impairments: Muhammad Uzair Rasheed 2009-CPE-03 Uce&T Bzu MultanDocument25 pagesChannel Impairments: Muhammad Uzair Rasheed 2009-CPE-03 Uce&T Bzu MultanRaman TrivediNo ratings yet
- Unit-5 - Detection of Radar Signals in NoiseDocument39 pagesUnit-5 - Detection of Radar Signals in NoiseMani PrinceNo ratings yet
- Signal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDocument4 pagesSignal and Production of Signal: Digital Signal (Figure 1b) Refers To MoreDarren GegantinoNo ratings yet
- Analolug and Digital Communication: Submitted BYDocument44 pagesAnalolug and Digital Communication: Submitted BYAnsh MathurNo ratings yet
- Time and Frequency DomainsDocument5 pagesTime and Frequency DomainsAlemat TesfayNo ratings yet
- Analog To Digital ConversionDocument11 pagesAnalog To Digital Conversionsaurabh2078No ratings yet
- 3.1-3.4 Signal GeneratorDocument34 pages3.1-3.4 Signal GeneratorFadhilatullaili AbdullahNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Random VariablesDocument8 pagesRandom VariablesRakshithNo ratings yet
- XUV400 MobileLeafletDocument8 pagesXUV400 MobileLeafletRakshithNo ratings yet
- What Is CANDocument4 pagesWhat Is CANRakshithNo ratings yet
- Network AnalyzerDocument54 pagesNetwork AnalyzerRakshithNo ratings yet
- Tta Elearning Courses RF and Microwave EngineeringDocument43 pagesTta Elearning Courses RF and Microwave EngineeringRakshithNo ratings yet
- Exam SpecDocument2 pagesExam SpecRakshithNo ratings yet
- 2021 03 10 Debug Embedded Systems Part 1 V 1.01Document95 pages2021 03 10 Debug Embedded Systems Part 1 V 1.01RakshithNo ratings yet
- 1-15 p32 Automated Validation of Canfd Networks Cs-GroupDocument2 pages1-15 p32 Automated Validation of Canfd Networks Cs-GroupRakshithNo ratings yet
- Circuits and NetworksDocument2 pagesCircuits and NetworksPritesh PatelNo ratings yet
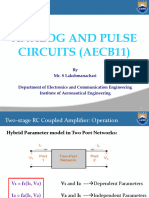
- Two Port Characterizations: Electronic Circuits 1Document26 pagesTwo Port Characterizations: Electronic Circuits 1OursIsTheFuryNo ratings yet
- IndexDocument54 pagesIndexpardeepNo ratings yet
- H-Parameters and Single Stage Amplifier AnalysisDocument14 pagesH-Parameters and Single Stage Amplifier AnalysisMrs. P. Ganga BhavaniNo ratings yet
- Power1 Chapter 5Document33 pagesPower1 Chapter 5EnyewNo ratings yet
- Introduction & Types of NnetworksDocument4 pagesIntroduction & Types of NnetworksPrashant SharmaNo ratings yet
- Apostila - Matemática Computacional - Adérito Araújo - Univ. de Coimbra, PortugalDocument29 pagesApostila - Matemática Computacional - Adérito Araújo - Univ. de Coimbra, PortugalAntonio PortelaNo ratings yet
- Analysis of Small Signal-Transistor Amplifiers: Reasons For Adopting This TechniqueDocument14 pagesAnalysis of Small Signal-Transistor Amplifiers: Reasons For Adopting This TechniqueAnderson LeblancNo ratings yet
- Electrical Circuit Analysis and Design by Noel M. MorrisDocument421 pagesElectrical Circuit Analysis and Design by Noel M. MorrisErnesto Ch Agamar100% (7)
- Assignment 1Document22 pagesAssignment 122L149 - SUBASH KARTHICK VNo ratings yet
- Electric Circuits and FieldsDocument20 pagesElectric Circuits and Fieldssubhrajit kumar sethiNo ratings yet
- Measurement of UHF RFID Tag Antenna ImpedanceDocument4 pagesMeasurement of UHF RFID Tag Antenna ImpedanceMar CelNo ratings yet
- Full Download Book Fundamentals of Electric Circuits 2 PDFDocument41 pagesFull Download Book Fundamentals of Electric Circuits 2 PDFshirley.sur179100% (36)
- 3rd Sem SyllabusDocument19 pages3rd Sem SyllabusabcNo ratings yet
- B. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharDocument55 pagesB. Tech. Course Structure & Syllabus, Electrical Engineering Department, N.I.T. SilcharKunalNo ratings yet
- Transistor at Low FrequenciesDocument40 pagesTransistor at Low Frequenciesjoydeep12100% (1)
- SPICE Equivalent Circuits of Frequency-Domain Responses: Giulio Antonini, Member, IEEEDocument11 pagesSPICE Equivalent Circuits of Frequency-Domain Responses: Giulio Antonini, Member, IEEEKandimalla Divyabramhendra ChowdaryNo ratings yet
- HFIC Chapter 3 Network ParametersDocument27 pagesHFIC Chapter 3 Network Parameterssebastian nasiNo ratings yet
- Chapter 4: Single and Multiport Networks-: 4.3 Network Properties and ApplicationsDocument13 pagesChapter 4: Single and Multiport Networks-: 4.3 Network Properties and ApplicationsLuis DeVargasNo ratings yet
- DC Transient AnalysisDocument206 pagesDC Transient Analysisasanithanair35No ratings yet
- Lab Power System OFF GRID SOLAR PVDocument23 pagesLab Power System OFF GRID SOLAR PVمحممد ترميزي بحر الدينNo ratings yet
- Network Analysis Sept 2021Document3 pagesNetwork Analysis Sept 2021rajeswari gandhamNo ratings yet
- Electronics Engineering Syllabus - AMUDocument50 pagesElectronics Engineering Syllabus - AMUAdil MohammadNo ratings yet
- Network Analysis ECE Question Bank 4,5,6Document5 pagesNetwork Analysis ECE Question Bank 4,5,6RajeshKanchanaNo ratings yet
- General Coupling Matrix Synthesis Methods For Chebyshev Filtering FunctionsDocument10 pagesGeneral Coupling Matrix Synthesis Methods For Chebyshev Filtering FunctionsFlorin CalinescuNo ratings yet
- Jawaharlal Nehru Technological University Anantapur: Implementation of G ParametersDocument19 pagesJawaharlal Nehru Technological University Anantapur: Implementation of G ParametersKollimarala Srinivasa raoNo ratings yet
- Chapter 7 Two Port NetworksDocument89 pagesChapter 7 Two Port Networkssudarshan poojary100% (1)
- Voinigescu Book ChapterDocument30 pagesVoinigescu Book Chapterwantcheck1No ratings yet
- Transist 224###@Document205 pagesTransist 224###@NehaNo ratings yet