Download as pdf or txt
You might also like
- Our House Is On FireDocument45 pagesOur House Is On FireKatharina J. MuhrNo ratings yet
- CB To Fill Up Items 1,2 & 4 and Col 3 of The Checklist NABCB AT To Fill The RestDocument75 pagesCB To Fill Up Items 1,2 & 4 and Col 3 of The Checklist NABCB AT To Fill The RestBS AnilKumarNo ratings yet
- Assignment 2 ReportDocument13 pagesAssignment 2 ReportMuhammad DaniyalNo ratings yet
- Calculus Notes CH 6Document9 pagesCalculus Notes CH 6mandela2013No ratings yet
- State Space Equations - Pole Assignment by State Feedback - Observer DesignDocument27 pagesState Space Equations - Pole Assignment by State Feedback - Observer DesignEngr. Naveed MazharNo ratings yet
- Legrange & Serendipity PDFDocument14 pagesLegrange & Serendipity PDFvinodh159No ratings yet
- Weekv1 IntegralDocument22 pagesWeekv1 IntegralChristofer YalungNo ratings yet
- Lecture 05 - Decrease and ConquerDocument22 pagesLecture 05 - Decrease and ConquerwaheedgxNo ratings yet
- DAA - Chapter - 5Document37 pagesDAA - Chapter - 5SabonaNo ratings yet
- Unit 3 - Discrete Fourier TransformDocument62 pagesUnit 3 - Discrete Fourier Transformchandrani deyNo ratings yet
- Ant Colony Numerical ExampleDocument20 pagesAnt Colony Numerical ExampleHarish Kant SoniNo ratings yet
- M1120 Calculus (II) LectureDocument7 pagesM1120 Calculus (II) LectureAuzzie MovinNo ratings yet
- COL 106: Data-Structures and Algorithms: Sorting Lower BoundDocument5 pagesCOL 106: Data-Structures and Algorithms: Sorting Lower BoundhellopNo ratings yet
- Coordinate Descent: Ryan Tibshirani Convex Optimization 10-725/36-725Document29 pagesCoordinate Descent: Ryan Tibshirani Convex Optimization 10-725/36-725Yang LongNo ratings yet
- Exact Solutions To NP-Complete Problems: by Mr. Satyasundara Mahapatra Asst. Prof. (Comp. SC.) IISIT, BhubaneswarDocument25 pagesExact Solutions To NP-Complete Problems: by Mr. Satyasundara Mahapatra Asst. Prof. (Comp. SC.) IISIT, BhubaneswarpradiptartNo ratings yet
- BacktrackingDocument65 pagesBacktracking21311a1993No ratings yet
- Taylor 2 3Document8 pagesTaylor 2 3Nattapat TantapongNo ratings yet
- Unconstrained Multivariable OptimizationDocument42 pagesUnconstrained Multivariable OptimizationAliyya DhiyaNo ratings yet
- Anti DerivativesDocument15 pagesAnti DerivativesNoli NogaNo ratings yet
- L - Unit 3Document3 pagesL - Unit 3Raymond ShirimaNo ratings yet
- NP Complete ReductionsDocument24 pagesNP Complete ReductionstariqravianNo ratings yet
- 4.1 Limits, Continuity and Convergence: X X X XX X X X X X X X X X FX X X X X FX X X KX X FX XDocument4 pages4.1 Limits, Continuity and Convergence: X X X XX X X X X X X X X X FX X X X X FX X X KX X FX XcandyNo ratings yet
- Maths - 2bimportant Q RemovedDocument9 pagesMaths - 2bimportant Q Removedclass workNo ratings yet
- Graphics 03 Basic Line DDADocument22 pagesGraphics 03 Basic Line DDATanvir AlamNo ratings yet
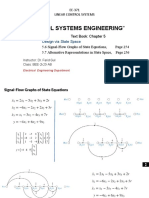
- Chapter 5 Alternative Representation in State SpaceDocument13 pagesChapter 5 Alternative Representation in State SpaceRakhmeen gulNo ratings yet
- Integration of Rational Functions by Partial FractionDocument22 pagesIntegration of Rational Functions by Partial FractionRitzz ThakurNo ratings yet
- Anti DerivativesDocument15 pagesAnti DerivativesBretana joanNo ratings yet
- AOD Assignment-1Document11 pagesAOD Assignment-1AbhiNo ratings yet
- Limits Quiz ReviewDocument3 pagesLimits Quiz ReviewAnthony Mercado LeonardoNo ratings yet
- DAA - Decrease and ConguerDocument72 pagesDAA - Decrease and ConguerAndika NugrahaNo ratings yet
- Lesson 5Document47 pagesLesson 5Anonymous qwId10om4wNo ratings yet
- Lecture 12Document15 pagesLecture 12mbilal23640No ratings yet
- TBS Integration EntranceDocument4 pagesTBS Integration EntranceAnonymous HSXJ3qIAeFNo ratings yet
- Binomal ExpansionDocument23 pagesBinomal ExpansionNicoletta SmithNo ratings yet
- Factoring Cubic Polynomials: Mr. Jacobs Algebra 1Document6 pagesFactoring Cubic Polynomials: Mr. Jacobs Algebra 1arturojmartinezNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deDocument28 pagesMANE 4240 & CIVL 4240 Introduction To Finite Elements: Prof. Suvranu deskkskNo ratings yet
- AntiderivativesDocument21 pagesAntiderivativesAlberca Arve jadeNo ratings yet
- 02-Systems of Linear EquationDocument24 pages02-Systems of Linear EquationRifqi T. MaulanaNo ratings yet
- Back TrackingDocument43 pagesBack TrackinggjolluNo ratings yet
- Decrease and ConquerDocument45 pagesDecrease and ConquerObaid ur RehmanNo ratings yet
- 25 Coord DescDocument29 pages25 Coord DescNishanta BoroNo ratings yet
- 2.2: Polynomial Functions: PrecalculusDocument22 pages2.2: Polynomial Functions: Precalculusapi-472822698No ratings yet
- Techniques of DifferentiationDocument29 pagesTechniques of DifferentiationAmeet Singh SidhuNo ratings yet
- Specialist Maths: Calculus Week 6 Definite Integrals & AreasDocument23 pagesSpecialist Maths: Calculus Week 6 Definite Integrals & AreasJess Peralta0% (1)
- TS - SR - Maths Iib - Imp Questions-2023-24Document6 pagesTS - SR - Maths Iib - Imp Questions-2023-24jaashwanand09No ratings yet
- Dividing Polynomials Using Long DivisionDocument33 pagesDividing Polynomials Using Long DivisionReinabelle Marfil MarquezNo ratings yet
- Algebra 2: Section 5.5Document15 pagesAlgebra 2: Section 5.5api-16254560No ratings yet
- Constraint+Satisfaction+Problem IIDocument38 pagesConstraint+Satisfaction+Problem IIM MNo ratings yet
- MA15910Lesson16Notes (Revsp15)Document6 pagesMA15910Lesson16Notes (Revsp15)Jash YeriNo ratings yet
- SMA 1117 - Lec 3Document30 pagesSMA 1117 - Lec 3Samuel WocheNo ratings yet
- Final Trial MLDocument4 pagesFinal Trial MLRaghav RawatNo ratings yet
- TS - SR - Maths Iib - Imp Questions-2023-24Document6 pagesTS - SR - Maths Iib - Imp Questions-2023-24p5bmt8njqwNo ratings yet
- Maths 2023 Walk - in Day Centre ManualDocument64 pagesMaths 2023 Walk - in Day Centre Manualmashileharvey01No ratings yet
- Dsa 05 T ShankarDocument6 pagesDsa 05 T Shankarapi-3737469No ratings yet
- Sri Vidya College of Engineering and Technology, Virudhunagar Course Material (Question Bank)Document4 pagesSri Vidya College of Engineering and Technology, Virudhunagar Course Material (Question Bank)David MillerNo ratings yet
- Golden Section Method - New PracticeDocument21 pagesGolden Section Method - New PracticeHedy LiuNo ratings yet
- Chapter 5 Integration - Part2Document47 pagesChapter 5 Integration - Part2checekNo ratings yet
- Implicit Differentiation: Lesson 6.4Document11 pagesImplicit Differentiation: Lesson 6.4FerrolinoLouieNo ratings yet
- Fleis Surdsindices and Logarithms Working RulesDocument20 pagesFleis Surdsindices and Logarithms Working RulesEmmaculate OngumNo ratings yet
- CSC 8301-Design and Analysis of AlgorithmsDocument16 pagesCSC 8301-Design and Analysis of Algorithmsabdullah noorNo ratings yet
- Chapter 5: Some Discrete Probability Distributions: 5.2: Discrete Uniform DistributionDocument21 pagesChapter 5: Some Discrete Probability Distributions: 5.2: Discrete Uniform DistributionAnonymous OTvBGdzL5ONo ratings yet
- Integration of One-forms on P-adic Analytic Spaces. (AM-162)From EverandIntegration of One-forms on P-adic Analytic Spaces. (AM-162)No ratings yet
- Artificial Intelligence: Local SearchDocument36 pagesArtificial Intelligence: Local Searchরাফিদ আহমেদNo ratings yet
- UntitledDocument9 pagesUntitledরাফিদ আহমেদNo ratings yet
- Artificial Intelligence: Prof. Dr. Fazlul Hasan SiddiquiDocument21 pagesArtificial Intelligence: Prof. Dr. Fazlul Hasan Siddiquiরাফিদ আহমেদNo ratings yet
- AI Search BasicsDocument14 pagesAI Search Basicsরাফিদ আহমেদNo ratings yet
- Constraint Satisfaction ProblemsDocument35 pagesConstraint Satisfaction Problemsরাফিদ আহমেদNo ratings yet
- Artificial Intelligence: 4. Classical Search, Part II: Informed Search How To Not Play Stupid When Solving A ProblemDocument67 pagesArtificial Intelligence: 4. Classical Search, Part II: Informed Search How To Not Play Stupid When Solving A Problemরাফিদ আহমেদNo ratings yet
- CSE225 Final AssignementDocument3 pagesCSE225 Final Assignementরাফিদ আহমেদNo ratings yet
- A Variable Sized 2 Dimensional Data Structure With Circular Linked ListsDocument4 pagesA Variable Sized 2 Dimensional Data Structure With Circular Linked Listsরাফিদ আহমেদNo ratings yet
- UntitledDocument10 pagesUntitledরাফিদ আহমেদNo ratings yet
- OFF For Oranges - Instructor Notes March 2014 CSDDocument15 pagesOFF For Oranges - Instructor Notes March 2014 CSDDebrah DebbieNo ratings yet
- Prilepin's ChartDocument7 pagesPrilepin's ChartHenry Clayton0% (1)
- Homework Punch CardsDocument5 pagesHomework Punch Cardsafetynbpy100% (1)
- Moore Stevens International DirectoryDocument296 pagesMoore Stevens International DirectoryShaun Neville50% (2)
- Recent Advances in Enhanced Flooded Battery For Smart Mild Hybrid Power TrainsDocument29 pagesRecent Advances in Enhanced Flooded Battery For Smart Mild Hybrid Power Trains3 GamerNo ratings yet
- Walt Disney Was Born in ChicagoDocument24 pagesWalt Disney Was Born in ChicagoNyimaSherpaNo ratings yet
- Rega Brio ManualDocument17 pagesRega Brio ManualjamocasNo ratings yet
- PEH Pre-Finals ReviewerDocument1 pagePEH Pre-Finals ReviewerMaribeth Alyssa GoNo ratings yet
- Juhani Pallasmaa Complete MonographDocument52 pagesJuhani Pallasmaa Complete MonographYang Yu100% (1)
- The Head and The Heart National Identity and Urban Planning in A Devolved ScotlandDocument23 pagesThe Head and The Heart National Identity and Urban Planning in A Devolved ScotlandMarkNo ratings yet
- 1osh LeadsDocument72 pages1osh Leadssaskiamogale100% (1)
- Customer Service ExecutiveDocument54 pagesCustomer Service ExecutiveRakshita Bhat100% (1)
- Fourier OpticsDocument9 pagesFourier Opticssal.paradise.1No ratings yet
- ReederresumeDocument2 pagesReederresumeapi-425284294No ratings yet
- Renault 5 Buyers GuideDocument4 pagesRenault 5 Buyers Guider5gordini100% (2)
- Best Practices SQL Server For OpenText Content Server 10.5Document44 pagesBest Practices SQL Server For OpenText Content Server 10.5peptaNo ratings yet
- Strategic Operation ManagementDocument7 pagesStrategic Operation ManagementJayrald Delos SantosNo ratings yet
- 5-Removable Partial Denture DesignDocument66 pages5-Removable Partial Denture DesignHiYam MohamutNo ratings yet
- Loans and MortgagesDocument26 pagesLoans and Mortgagesparkerroach21No ratings yet
- Grade 2 - Assessment ADocument11 pagesGrade 2 - Assessment Aapi-251068386No ratings yet
- Sardar JokesDocument5 pagesSardar JokesblpsimhaNo ratings yet
- Phy F313Document3 pagesPhy F313Ankit GoyalNo ratings yet
- Biochem Lab NotesDocument26 pagesBiochem Lab NotesRicky Justin NgoNo ratings yet
- Part 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportDocument52 pagesPart 2 Twentieth Century Naval Dockyards Devonport and Portsmouth Characterisation ReportToby ChessonNo ratings yet
- Onkyo tx-nr737 SM Parts Rev6Document110 pagesOnkyo tx-nr737 SM Parts Rev6MiroslavNo ratings yet
- Valeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Document11 pagesValeroso v. People, G.R. No. 164815, February 22, 2008 (546 SCRA 450)Philip Duvan FernandezNo ratings yet
- Are You Searching For Managerial Finance & Accounting Answer? Visit Us Now!Document5 pagesAre You Searching For Managerial Finance & Accounting Answer? Visit Us Now!Jamie marcNo ratings yet
- 510 - Sps Vega vs. SSS, 20 Sept 2010Document2 pages510 - Sps Vega vs. SSS, 20 Sept 2010anaNo ratings yet