Download as pdf or txt
You might also like
- LG IS3 ManualDocument137 pagesLG IS3 ManualEugenio Francisco Martínez Mora70% (10)
- Pass Ultrasound Physics Exam Study Guide ReviewFrom EverandPass Ultrasound Physics Exam Study Guide ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- 1b Static & Dynamic Characteristics&Loading Effect PDFDocument45 pages1b Static & Dynamic Characteristics&Loading Effect PDFvishnu100% (1)
- Introduction To Measurement and Instrumentation SystemDocument38 pagesIntroduction To Measurement and Instrumentation SystemFaizal AbdullahNo ratings yet
- Pass Ultrasound Physics Exam Review Match the AnswersFrom EverandPass Ultrasound Physics Exam Review Match the AnswersRating: 4 out of 5 stars4/5 (4)
- Lect 1 - Electronics and InstrumentationDocument49 pagesLect 1 - Electronics and Instrumentationahmedabousree4No ratings yet
- Unit I Basics of MechtronicsDocument68 pagesUnit I Basics of MechtronicsvijayacnkumarNo ratings yet
- L3 - Introduction To SensorsDocument57 pagesL3 - Introduction To SensorsSana DINo ratings yet
- Mechatronics - 302050: Lecture Notes / PPT Unit IDocument66 pagesMechatronics - 302050: Lecture Notes / PPT Unit ISwapvaibNo ratings yet
- Lesson-3, 6, 7, 8, 9 (I & PC)Document78 pagesLesson-3, 6, 7, 8, 9 (I & PC)Amit ChaudharyNo ratings yet
- EE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićDocument22 pagesEE305 Instrumentation and Measurement Teaching Assistant Šejla DžakmićFrank WhiteNo ratings yet
- 1-Intro and First UnitDocument39 pages1-Intro and First Unitsahale sheraNo ratings yet
- 7CS4 IOT Unit-2Document141 pages7CS4 IOT Unit-2Nikhil KumarNo ratings yet
- Arusha Technical College: Automation EET 06102 Introduction To Sensors Wilson, DDocument73 pagesArusha Technical College: Automation EET 06102 Introduction To Sensors Wilson, DNurdin badiNo ratings yet
- Sensors 123Document112 pagesSensors 123Mahmoud HassanNo ratings yet
- Unit IDocument131 pagesUnit IpruNo ratings yet
- Smartsensor 5Document44 pagesSmartsensor 5Ravi KumarNo ratings yet
- Instrumentation and Measurements: Fall Semster 2019Document19 pagesInstrumentation and Measurements: Fall Semster 2019khizar abbasNo ratings yet
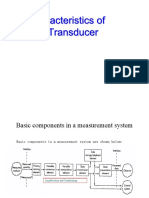
- Characteristic of TransducerDocument40 pagesCharacteristic of Transducergkarthikeyan50% (2)
- Newlectures N2Document11 pagesNewlectures N2Muhammad SiddiqueNo ratings yet
- Industrial Instrumentation: Chapter 2: Instrument Types and Performance Characteristics-Part 1Document15 pagesIndustrial Instrumentation: Chapter 2: Instrument Types and Performance Characteristics-Part 1Nguyễn Xuân DươngNo ratings yet
- Sensors and TransducersDocument118 pagesSensors and TransducersDhaval Patel100% (1)
- Lecture # 2&3Document51 pagesLecture # 2&3Noor UL AaienNo ratings yet
- Chapter 4.0 Sensor and Signal CondDocument49 pagesChapter 4.0 Sensor and Signal CondmathewosNo ratings yet
- Generalized Configurations and Functional Descriptions of Measuring InstrumentsDocument31 pagesGeneralized Configurations and Functional Descriptions of Measuring InstrumentsNishanthi BheemanNo ratings yet
- Chapter 4.0 Sensor and Signal ConditioningDocument49 pagesChapter 4.0 Sensor and Signal ConditioningDawit MengisteabNo ratings yet
- Chapter 3 Part 1 Sensor and TransducersDocument48 pagesChapter 3 Part 1 Sensor and TransducersFikadu Eshetu100% (1)
- PI2 MeasurementDocument37 pagesPI2 MeasurementRamkumar ANo ratings yet
- E4416A/E4417A EPM-P Series Power Meters and E-Series E9320 Peak and Average Power SensorsDocument21 pagesE4416A/E4417A EPM-P Series Power Meters and E-Series E9320 Peak and Average Power SensorsPixel ShicNo ratings yet
- Metode Pengukuran (2) STD UgmDocument30 pagesMetode Pengukuran (2) STD Ugmmifdhal.rafinandaNo ratings yet
- Lecture #1 (Measurement Systems)Document56 pagesLecture #1 (Measurement Systems)inabalqisNo ratings yet
- EBC MINODE User ManualDocument31 pagesEBC MINODE User ManualGiani BuzatuNo ratings yet
- Sensors IDocument19 pagesSensors ISachith Praminda RupasingheNo ratings yet
- With The Help of Block Diagram, Elaborate The Working of A Generalizes Measuring SystemDocument15 pagesWith The Help of Block Diagram, Elaborate The Working of A Generalizes Measuring Systemusiaf007No ratings yet
- Sensors in Internet of ThingsDocument4 pagesSensors in Internet of ThingsAjit Kushwaha100% (1)
- Mechanical Engineering Mechatronics Sensors-And-signal-processing NotesDocument56 pagesMechanical Engineering Mechatronics Sensors-And-signal-processing NotesPritam OjhaNo ratings yet
- Electrical Measurements and Instrumentation ProjectDocument96 pagesElectrical Measurements and Instrumentation Projectsetsindia373575% (4)
- Precision Engineering & MetrologyDocument58 pagesPrecision Engineering & MetrologyAsad KhanNo ratings yet
- Sensors & TransducersDocument5 pagesSensors & TransducersSachith Praminda RupasingheNo ratings yet
- Solid State SensorsDocument39 pagesSolid State SensorsRona Mae Raza RecaldeNo ratings yet
- 2141-375 Measurement and Instrumentation: Basic Concepts of Measurement MethodsDocument37 pages2141-375 Measurement and Instrumentation: Basic Concepts of Measurement MethodsnagabushanamNo ratings yet
- Bab5 Sensorbiomedika PDFDocument8 pagesBab5 Sensorbiomedika PDFGALIH SETYAWANNo ratings yet
- Classification of Methods of MeasurementsDocument60 pagesClassification of Methods of MeasurementsVenkat Krishna100% (2)
- Transducers: Transducer ElementsDocument14 pagesTransducers: Transducer ElementsSourav SwastikNo ratings yet
- OCW SKN3022 Instrumentation CH 3Document31 pagesOCW SKN3022 Instrumentation CH 3ramajaxNo ratings yet
- Bio Instrum Intro1Document13 pagesBio Instrum Intro1CALEB DAVID ROMERO MERCADONo ratings yet
- Unit-2: Sensors & TransducersDocument10 pagesUnit-2: Sensors & TransducersSourabh GavandiNo ratings yet
- Topic 2-Mesurands and Transducers (14-02-2014)Document63 pagesTopic 2-Mesurands and Transducers (14-02-2014)Fer Martinez de la RivaNo ratings yet
- EE 87022 Sensors, Instrumentation, and Measurements in Electronic ApplicationsDocument35 pagesEE 87022 Sensors, Instrumentation, and Measurements in Electronic Applicationsdrunken monkeyNo ratings yet
- Chapter 4: Scaling: A. Definition of Key TermsDocument8 pagesChapter 4: Scaling: A. Definition of Key TermsKevin MuhalingNo ratings yet
- Mechatronica 1 ElectronicsDocument62 pagesMechatronica 1 ElectronicsHahhaah BbbNo ratings yet
- Instrumentation & Measurement (ME342) : Chapter 2: Instrument Types and Performance CharacteristicsDocument40 pagesInstrumentation & Measurement (ME342) : Chapter 2: Instrument Types and Performance CharacteristicsMajid ArabiatNo ratings yet
- Unit IiiDocument11 pagesUnit IiiCbitpavan ReddyNo ratings yet
- 3 - Sensor and ActuatorsDocument31 pages3 - Sensor and Actuatorsmehulprajapati1661No ratings yet
- Chapter 4Document31 pagesChapter 4Kibrom MenasboNo ratings yet
- Sensors Selection CriteriaDocument23 pagesSensors Selection CriteriaMurali SiddarthNo ratings yet
- Sensors and TransducersDocument59 pagesSensors and TransducersnewworldosemwegieNo ratings yet
- SENSOR and Signal Processing UnitDocument57 pagesSENSOR and Signal Processing UnitRohit Ghulanavar100% (1)
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Fast and Easily Implementable Detection CircuitsDocument9 pagesFast and Easily Implementable Detection CircuitsPablo Henrique Seibert JahnoNo ratings yet
- Components 1Document18 pagesComponents 1Viktor LobenokNo ratings yet
- Manual Vision FMDocument10 pagesManual Vision FMIchsan DachiNo ratings yet
- Tuberia Conduit Flexible EnerligthDocument1 pageTuberia Conduit Flexible Enerligthjunioralamo17No ratings yet
- Protopic540 Quatro SlitDocument51 pagesProtopic540 Quatro SlitAlejandro MelianNo ratings yet
- Design and ConstructionDocument47 pagesDesign and Constructionemmanuel akojiNo ratings yet
- Class D Amplifier PDFDocument7 pagesClass D Amplifier PDFHoracio Dorantes ReyesNo ratings yet
- Bul. 440R - Guardmaster® Safety Relays (DI, DIS, SI, CI, GLP, EM, and EMD)Document12 pagesBul. 440R - Guardmaster® Safety Relays (DI, DIS, SI, CI, GLP, EM, and EMD)Carlos AguirreNo ratings yet
- Kx-tg7321fx User GuideDocument60 pagesKx-tg7321fx User GuideHoria GiurgiuNo ratings yet
- Hyperloop One Letter Address 2159 Bay ST Los Angeles Ca 90021Document11 pagesHyperloop One Letter Address 2159 Bay ST Los Angeles Ca 90021api-646708752No ratings yet
- VFDDocument151 pagesVFDMUHAMMAD UZAIR100% (1)
- LDR PDFDocument136 pagesLDR PDFvighneshNo ratings yet
- Kip or Troubleshooting GuideDocument10 pagesKip or Troubleshooting Guideweber888100% (1)
- Parts Reference List: DCP-1510/1511/1512/1518 MFC-1810/1811/1813/1815/1818Document35 pagesParts Reference List: DCP-1510/1511/1512/1518 MFC-1810/1811/1813/1815/1818Алексей КазанцевNo ratings yet
- Service BulletinDocument4 pagesService BulletinMohammad yasinNo ratings yet
- RGGVY: Details of Quality Inspections Conducted by REC Quality Monitors and Rejection ThereinDocument3 pagesRGGVY: Details of Quality Inspections Conducted by REC Quality Monitors and Rejection ThereinNitish SinghNo ratings yet
- Rev.01 L90 - REF615 Gajah Tunggal - Pasar KemisDocument5 pagesRev.01 L90 - REF615 Gajah Tunggal - Pasar Kemisandi mulyanaNo ratings yet
- Nigeria PhysicDocument6 pagesNigeria PhysicAda ElokaNo ratings yet
- RTD-15 Operation ManualDocument46 pagesRTD-15 Operation ManualMohamed TarekNo ratings yet
- MTL Grounding Tp1121-1Document16 pagesMTL Grounding Tp1121-1mongo55No ratings yet
- Harmonics Guide: Control TechniquesDocument28 pagesHarmonics Guide: Control TechniquesHoang TruongNo ratings yet
- Unit 1 - Introduction To Control Systems - Part2 - SlidesDocument24 pagesUnit 1 - Introduction To Control Systems - Part2 - SlidesSiphamandla CokaNo ratings yet
- Unit - 4 - Power Electronics and Energy Storage in Smart GridDocument50 pagesUnit - 4 - Power Electronics and Energy Storage in Smart GridsujithNo ratings yet
- EE301Topic35 PDFDocument9 pagesEE301Topic35 PDFNaren VmdNo ratings yet
- Focus Tig 200 Ac/Dc PFCDocument2 pagesFocus Tig 200 Ac/Dc PFCsezai dağNo ratings yet
- SWR700 14 Ee0698Document80 pagesSWR700 14 Ee0698juriNo ratings yet
- DARPS System - UHF Antenna (PROCOM CXL 900-6LW)Document2 pagesDARPS System - UHF Antenna (PROCOM CXL 900-6LW)VishalNo ratings yet
- Evaluation of Reactive Ion Etching Processes For Fabrication of GaAs Algaas DevicesDocument4 pagesEvaluation of Reactive Ion Etching Processes For Fabrication of GaAs Algaas DevicesMasoud MuradNo ratings yet
- Physics-II (Quarter-II)Document2 pagesPhysics-II (Quarter-II)Muhammad QasimNo ratings yet