Download as pdf or txt
You might also like
- NDT Request FormDocument1 pageNDT Request FormSHANENo ratings yet
- 6940 21524 1 PBDocument10 pages6940 21524 1 PBSanthosh KumarNo ratings yet
- WB1 2Document9 pagesWB1 2Saeed JavdaniNo ratings yet
- TruptiDocument7 pagesTruptidebanshushekharNo ratings yet
- Static Caracteristics BellowsDocument56 pagesStatic Caracteristics BellowsDiana SoareNo ratings yet
- Modeling and Simulation of The Orthogonal Cut by Using The Law of DamageDocument4 pagesModeling and Simulation of The Orthogonal Cut by Using The Law of DamageHayderyNo ratings yet
- Determination of Stress Concentration FactorsDocument5 pagesDetermination of Stress Concentration FactorsEduardo Felippe de SouzaNo ratings yet
- 3.2 Design Parameters and CalculationsDocument9 pages3.2 Design Parameters and CalculationsMasAmirahNo ratings yet
- Amr 1013 242Document8 pagesAmr 1013 242Ibrahim HasanNo ratings yet
- Problem FormulationDocument5 pagesProblem FormulationSudeesh SudevanNo ratings yet
- RG 2020Document20 pagesRG 2020Vikash ShuklaNo ratings yet
- Design and Analysis of Crankshaft For Single Cylinder 4-Stroke Deisel EngineDocument3 pagesDesign and Analysis of Crankshaft For Single Cylinder 4-Stroke Deisel EngineChetan GuptaNo ratings yet
- Technical Symposiu - Bessie PDFDocument28 pagesTechnical Symposiu - Bessie PDFXiomara BarónNo ratings yet
- Design Methodology of A Permanent MagnetDocument10 pagesDesign Methodology of A Permanent MagnetJian ZhangNo ratings yet
- Crankshaft VibrationDocument8 pagesCrankshaft VibrationjohansolNo ratings yet
- Machine DesignDocument8 pagesMachine DesignSirajuddin ANo ratings yet
- Flow Simulations in A Small Bulb Turbine Using TwoDocument11 pagesFlow Simulations in A Small Bulb Turbine Using TwoBurak UNo ratings yet
- Simplified Ice Impact Load Estimate For Azimuthing ThrustersDocument10 pagesSimplified Ice Impact Load Estimate For Azimuthing ThrustersMaximNo ratings yet
- Jagtap-2015-Simulation of Quarter Car Model Using MatlabDocument8 pagesJagtap-2015-Simulation of Quarter Car Model Using MatlabKyle N SamarooNo ratings yet
- LTBD2017 Paper Tschernutter FinalDocument9 pagesLTBD2017 Paper Tschernutter FinaltirtapelangiNo ratings yet
- 076BAS030 Assignment2 CFDDocument19 pages076BAS030 Assignment2 CFDPritam SahNo ratings yet
- Charpy Impact Test: An Overview of Mechanical and Physical Testing of Composite MaterialsDocument11 pagesCharpy Impact Test: An Overview of Mechanical and Physical Testing of Composite MaterialswaniNo ratings yet
- Zhang IcemsDocument4 pagesZhang IcemskfaliNo ratings yet
- Improvement of The Turbine Main Stop Valves With Flow Simulation in Erosion by Solid Particle Impact CFDDocument10 pagesImprovement of The Turbine Main Stop Valves With Flow Simulation in Erosion by Solid Particle Impact CFDsamuelNo ratings yet
- Solidworks SimulationDocument50 pagesSolidworks SimulationMark Chester KaraanNo ratings yet
- Cgj-2017-0209-Interpretation of Vane Shear Tests For Geotechnical Stability Calculations-Kouretzis Et AlDocument9 pagesCgj-2017-0209-Interpretation of Vane Shear Tests For Geotechnical Stability Calculations-Kouretzis Et AlMarlon M. Agámez A Timocarbo - CarbofibreNo ratings yet
- RAD CourseworkDocument12 pagesRAD CourseworkAlfieNo ratings yet
- Erosion of Choke Valves Using CFD and ExperimentDocument8 pagesErosion of Choke Valves Using CFD and ExperimentHeath HoughtonNo ratings yet
- Design and Experimental Evaluation of A MagnetorheologicalDocument8 pagesDesign and Experimental Evaluation of A Magnetorheologicalivan celyNo ratings yet
- PM Synchronous MachineDocument14 pagesPM Synchronous MachineNguyen Duy ChungNo ratings yet
- Numerical Simulation of Static Wind Coefficient and Flow Field of Box Girder of High Pier and Large Span Continuous Bridge, Guangbiao JiangDocument7 pagesNumerical Simulation of Static Wind Coefficient and Flow Field of Box Girder of High Pier and Large Span Continuous Bridge, Guangbiao JiangBuay BuayNo ratings yet
- Mhashilkar (2016) - Design and Analysis of EOT Crane HookDocument6 pagesMhashilkar (2016) - Design and Analysis of EOT Crane HookGogyNo ratings yet
- Calculating Stray Losses in Power Transformers Using Surface Impedance With Finite ElementsDocument4 pagesCalculating Stray Losses in Power Transformers Using Surface Impedance With Finite ElementsMatejComelNo ratings yet
- Determination of Blockage Correction in Open-Jet Wind TunnelDocument6 pagesDetermination of Blockage Correction in Open-Jet Wind Tunnelmoro1381100% (1)
- An Innovative Electric Ship Steering Systems: Analysis and ImplementationDocument10 pagesAn Innovative Electric Ship Steering Systems: Analysis and ImplementationTJPRC PublicationsNo ratings yet
- FSI Analyses of A High-Performance Solar Boat Composite T-HydrofoilDocument6 pagesFSI Analyses of A High-Performance Solar Boat Composite T-HydrofoilTomás CarreiraNo ratings yet
- Assignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value UnitDocument3 pagesAssignment 5: Non-Linear Lateral Tire Dynamics: Parameter Value Unitshashank saiNo ratings yet
- Viscous Damper For Hanged CablesDocument8 pagesViscous Damper For Hanged CablesAshutoshAparajNo ratings yet
- CE 363 - Soil Mechanics ProblemsDocument16 pagesCE 363 - Soil Mechanics ProblemsAli Cem BuzluNo ratings yet
- Determination of A Dynamic Model of A Centrifugal Steam Turbine: Analysis of The Characteristics and Calculation of The Operating PointDocument18 pagesDetermination of A Dynamic Model of A Centrifugal Steam Turbine: Analysis of The Characteristics and Calculation of The Operating PointralisoamanoaNo ratings yet
- Rapid Design Optimization of A Composite RetainerDocument7 pagesRapid Design Optimization of A Composite Retainerzmajeed2016No ratings yet
- Thermal AnalizDocument71 pagesThermal AnalizkarayagizmuhammedNo ratings yet
- IJATES Journal PaperDocument9 pagesIJATES Journal PaperAJIT SHINDENo ratings yet
- Plaxis On The Use of The Shotcrete Udsm For Modelling Concrete 2016Document22 pagesPlaxis On The Use of The Shotcrete Udsm For Modelling Concrete 2016tpgggkNo ratings yet
- Sitti Al 2001Document8 pagesSitti Al 2001scribdcheealleNo ratings yet
- CHAPTER-2 Intoduction To ModelingDocument51 pagesCHAPTER-2 Intoduction To Modelingይታገሡ ተሥፋዬNo ratings yet
- Behaviour of Combined Pile-Raft Foundation Under Static and Pseudo-Static Conditions Using Plaxis3dDocument10 pagesBehaviour of Combined Pile-Raft Foundation Under Static and Pseudo-Static Conditions Using Plaxis3dJose FernandoNo ratings yet
- HydroDocument8 pagesHydroDanu PamungkasNo ratings yet
- Connecting Rod PresentationDocument17 pagesConnecting Rod PresentationArul JONo ratings yet
- Vibration and Flow Simulation AnaylsisDocument17 pagesVibration and Flow Simulation AnaylsisAdeel AltafNo ratings yet
- Assignment#1 - Solution - EI - Summer 2024Document6 pagesAssignment#1 - Solution - EI - Summer 2024D.J Hustl0No ratings yet
- Research Paper Study On Comparative Analysis of The TDocument14 pagesResearch Paper Study On Comparative Analysis of The Tlilharerakesh12No ratings yet
- Optimum Analysis of I.C. Engine Connecting RodDocument7 pagesOptimum Analysis of I.C. Engine Connecting RodInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Natsu I 2009Document8 pagesNatsu I 2009Gabriel 123No ratings yet
- Analysis of Exhaust Manifold of 4-Cylinder Si Engine Using CFDDocument14 pagesAnalysis of Exhaust Manifold of 4-Cylinder Si Engine Using CFDds8123395No ratings yet
- Actuator Disc Methods Applied To Wind Turbines: Robert MikkelsenDocument121 pagesActuator Disc Methods Applied To Wind Turbines: Robert MikkelsenEsojzerepNo ratings yet
- Genetic Algorithm Optimization of A Synchronous Reluctance MotorDocument62 pagesGenetic Algorithm Optimization of A Synchronous Reluctance MotoredumacerenNo ratings yet
- Design of A Compact BLDC Motor For Transient ApplicationsDocument5 pagesDesign of A Compact BLDC Motor For Transient ApplicationsscardigNo ratings yet
- Research PaperDocument10 pagesResearch PaperGitesh SammalwarNo ratings yet
- The Selection of A TBM Using Full Scale Laboratory Tests and Comparison ofDocument9 pagesThe Selection of A TBM Using Full Scale Laboratory Tests and Comparison ofantoniusnoroNo ratings yet
- Dynamic Damage and FragmentationFrom EverandDynamic Damage and FragmentationDavid Edward LambertNo ratings yet
- Water 10 00034 s001Document204 pagesWater 10 00034 s001hr maNo ratings yet
- Bohler E7018 Ø4.00mm LT-8105848Document1 pageBohler E7018 Ø4.00mm LT-8105848Ivonne Yana EnriquezNo ratings yet
- M.E. Structural Engineering R15 SyllabusDocument68 pagesM.E. Structural Engineering R15 Syllabuskrpsatheesh0% (1)
- Michael FaradayDocument13 pagesMichael FaradayKyla MeiNo ratings yet
- Chapter 7 Continued Entropy: A Measure of Disorder Study Guide in PowerpointDocument53 pagesChapter 7 Continued Entropy: A Measure of Disorder Study Guide in Powerpointbrayan CortezNo ratings yet
- Highlighting Differences Between Force-Based and Displacement-Based Design Solutions For Reinforced Concrete Frame StructuresDocument10 pagesHighlighting Differences Between Force-Based and Displacement-Based Design Solutions For Reinforced Concrete Frame StructuresCristhian MontielNo ratings yet
- Water Hammer Possible Cause and RemedyDocument3 pagesWater Hammer Possible Cause and RemedyKarthikeyanNo ratings yet
- Quiz : Chemical ReactionDocument18 pagesQuiz : Chemical ReactionHaziq AzizNo ratings yet
- Laboratory Activity 3 Uniformly Accelerated Motion StudentDocument3 pagesLaboratory Activity 3 Uniformly Accelerated Motion StudentejNo ratings yet
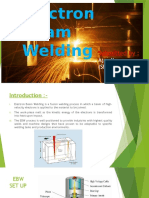
- Electron Beam Welding: Submitted byDocument13 pagesElectron Beam Welding: Submitted byTanmay WalkeNo ratings yet
- Jack Well - Well FoundationDocument9 pagesJack Well - Well FoundationRamakanth PuttyNo ratings yet
- Adv. in PDL SurgeryDocument12 pagesAdv. in PDL SurgeryHimanshuGoyalNo ratings yet
- Avogadro's Number: ExampleDocument10 pagesAvogadro's Number: ExampleAnonymous FhH8sPrNo ratings yet
- Tunnel Steel Formwork DesignDocument4 pagesTunnel Steel Formwork Designeric bargasNo ratings yet
- Mech-Engg., Thermal EngineeringDocument8 pagesMech-Engg., Thermal Engineeringnims1964No ratings yet
- Heating Systems: 1-IntroductionDocument5 pagesHeating Systems: 1-IntroductionFlaw Lesş MisşNo ratings yet
- Plate and Frame Filter Press: Cpb21404 Separation ProcessDocument15 pagesPlate and Frame Filter Press: Cpb21404 Separation ProcessRashdan CskNo ratings yet
- Extension Spring Design Info PDFDocument3 pagesExtension Spring Design Info PDFvio prasetioNo ratings yet
- Mechanical Engineering - Heat Transfer MCQ PDF: All Exam Review AddaDocument16 pagesMechanical Engineering - Heat Transfer MCQ PDF: All Exam Review AddaChetanNo ratings yet
- Avenger™ Model 91 Installation & Operation Instructions: Safety WarningsDocument7 pagesAvenger™ Model 91 Installation & Operation Instructions: Safety WarningsAldrin HernandezNo ratings yet
- Downwash Effects On LiftDocument3 pagesDownwash Effects On LiftkladjflNo ratings yet
- Resine Ip 2015-04 - Version3Document2 pagesResine Ip 2015-04 - Version3Enrique AntonioNo ratings yet
- On Equilibrium Phase Diagram of The Iron - Carbon System: Prof. Evgeny V. SidorovDocument6 pagesOn Equilibrium Phase Diagram of The Iron - Carbon System: Prof. Evgeny V. SidorovRamon BrownNo ratings yet
- P5 Oceans 31 MarchDocument22 pagesP5 Oceans 31 March5int1aischo4No ratings yet
- Design of CrystallizerDocument13 pagesDesign of CrystallizerABDULLAHI HAGAR FARAH HERSI STUDENTNo ratings yet
- Non-Continuous Piperacks System Modular Pipe RackDocument4 pagesNon-Continuous Piperacks System Modular Pipe RackMadhu GuptaNo ratings yet
- Blu0e Print of Session Ending Examination 2022-23-1Document3 pagesBlu0e Print of Session Ending Examination 2022-23-1akmNo ratings yet
- TDS 2.2.2 PDFDocument2 pagesTDS 2.2.2 PDFShripadNo ratings yet