Download as pdf or txt
You might also like
- Transx 2000 ManualDocument5 pagesTransx 2000 Manualacmemail583No ratings yet
- 2.card Sort Lab Sheet PDFDocument4 pages2.card Sort Lab Sheet PDFshjanNo ratings yet
- A Review Paper On Supercapacitor UltraDocument21 pagesA Review Paper On Supercapacitor UltraShahzaib AhmadNo ratings yet
- Nikon AssignmentDocument4 pagesNikon Assignmentfarah arshad100% (1)
- Grid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemDocument10 pagesGrid Integration of PMSG Based Wind Energy Conversion With Battery Storage SystemRahul KumarNo ratings yet
- Power Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorDocument13 pagesPower Maximization Control of Small Wind System Using Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Optimal Control of Matrix-Converter-Based WECS For Performance Enhancement and Efficiency OptimizationDocument10 pagesOptimal Control of Matrix-Converter-Based WECS For Performance Enhancement and Efficiency Optimizationkrishkrishna007No ratings yet
- Jjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorDocument6 pagesJjmie: Modeling and Optimization of Wind Turbine Driving Permanent Magnet Synchronous GeneratorhassenbbNo ratings yet
- Voltage Stability Enhancement of Wind Energy Conversion System Using SVPWM ControllerDocument13 pagesVoltage Stability Enhancement of Wind Energy Conversion System Using SVPWM ControllerpremsonyNo ratings yet
- Simulation and Analysis of PMSG-based Wind Energy Conversion System Using Different Coverter ModelsDocument5 pagesSimulation and Analysis of PMSG-based Wind Energy Conversion System Using Different Coverter ModelsHamza MahmoodNo ratings yet
- Volume (8) Issue (4) 493-507Document15 pagesVolume (8) Issue (4) 493-507Seid BegovicNo ratings yet
- Design of A Three-Phase Boost Type Vienna Rectifier For 1kW Wind Energy Conversion SystemDocument10 pagesDesign of A Three-Phase Boost Type Vienna Rectifier For 1kW Wind Energy Conversion SystemSreekanth IyerNo ratings yet
- Volume8Issue4493 507Document16 pagesVolume8Issue4493 507Mark FordNo ratings yet
- Impact of The Design Method of Permanent Magnets Synchronous Generators For Small Direct Drive Wind Turbines For Battery OperationDocument5 pagesImpact of The Design Method of Permanent Magnets Synchronous Generators For Small Direct Drive Wind Turbines For Battery OperationhassenbbNo ratings yet
- A Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleDocument6 pagesA Study of MPPT Schemes in PMSG Based Wind Turbine System: Joydeep Sarkar Prof. Shridhar S KhuleKhiem NguyenNo ratings yet
- FuzzyDocument8 pagesFuzzyRITWIK MALNo ratings yet
- 510 TorresDocument6 pages510 TorresnavidelecNo ratings yet
- CAD-based Design of Three Phase Transformer and CoDocument13 pagesCAD-based Design of Three Phase Transformer and CoM4gne7icNo ratings yet
- Estimacion CPDocument6 pagesEstimacion CPEdjavier CastilloNo ratings yet
- Wind Energy Systems and Power Quality: Matrix Versus Two-Level ConvertersDocument6 pagesWind Energy Systems and Power Quality: Matrix Versus Two-Level Converterschetan_bec2834No ratings yet
- Ullah 2009Document12 pagesUllah 2009t64008No ratings yet
- Energies: A New Miniature Wind Turbine For Wind Tunnel Experiments. Part I: Design and PerformanceDocument19 pagesEnergies: A New Miniature Wind Turbine For Wind Tunnel Experiments. Part I: Design and Performancemasrawy2010No ratings yet
- 11IPST078Document6 pages11IPST078mielle ricardoNo ratings yet
- Modelling and Simulation: Wind Turbine GeneratorDocument7 pagesModelling and Simulation: Wind Turbine GeneratorEléctrico IngenieríaNo ratings yet
- Power and Energy Analysis of Commercial Small Wind Turbine SystemsDocument6 pagesPower and Energy Analysis of Commercial Small Wind Turbine SystemsKamal DrawilNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- A Stand-Alone Wind Energy Conversion System: Debabrata PalDocument3 pagesA Stand-Alone Wind Energy Conversion System: Debabrata Palashu gslassie100% (1)
- Design and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueDocument5 pagesDesign and Modeling of Wind Energy Conversion System Based On PMSG Using MPPT TechniqueijsretNo ratings yet
- Predictive PM Synchronous Generator Based Small-Scale Wind Energy SystemDocument21 pagesPredictive PM Synchronous Generator Based Small-Scale Wind Energy SystemsarbiniNo ratings yet
- Control of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsDocument10 pagesControl of A PMSG Based Wind Energy Generation System For Power Maximization and Grid Fault ConditionsHieu VuNo ratings yet
- Reviewed - Control Technique For PEMFC Based Energy SystemDocument6 pagesReviewed - Control Technique For PEMFC Based Energy Systemiaset123No ratings yet
- Modeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DDocument5 pagesModeling and Simulation of PMSG Based Wecs: Jamuna V Baskar M Senthoorselvam DSundaraPandiyanNo ratings yet
- Actual Wind EnergyDocument11 pagesActual Wind EnergyAbhishek V DeshpandeNo ratings yet
- Performance Enhancement of Grid Connected Wind Energy Conversion SystemsDocument6 pagesPerformance Enhancement of Grid Connected Wind Energy Conversion Systemskanda71No ratings yet
- Optimal Location and Reactive Power Injection of WDocument8 pagesOptimal Location and Reactive Power Injection of WAzuan Abdul RazakNo ratings yet
- Assessment of Flicker Emission in A Grid Connected Wind FarmsDocument12 pagesAssessment of Flicker Emission in A Grid Connected Wind FarmspetraschukmNo ratings yet
- Erlich 2011 ADocument7 pagesErlich 2011 AsubasratnaNo ratings yet
- Grid Stability PDFDocument6 pagesGrid Stability PDFSomagutta JahnaviNo ratings yet
- Reactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisDocument10 pagesReactive Power Supplied by Wind Energy Converters - Cost-Benefit-AnalysisjandazNo ratings yet
- New Control Strategies of A Small Size Wind Generation System For Battery ChargingDocument6 pagesNew Control Strategies of A Small Size Wind Generation System For Battery ChargingZellagui EnergyNo ratings yet
- Wind Generation System For Charging BatteriesDocument6 pagesWind Generation System For Charging BatteriesAmit RanjanNo ratings yet
- Fuzzy Logic Control of Fuel Cell System For Residential Power GenerationDocument7 pagesFuzzy Logic Control of Fuel Cell System For Residential Power GenerationodysseysxNo ratings yet
- Performance Study of Grid Connected PMSG Based Wind Turbine SystemDocument4 pagesPerformance Study of Grid Connected PMSG Based Wind Turbine SystemDjedidi Med RiadhNo ratings yet
- Advanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemDocument11 pagesAdvanced Fuzzy Power Extraction Control of Wind Energy Conversion System For Power Quality Improvement in A Grid Tied Hybrid Generation SystemChristian JimenezNo ratings yet
- Conf 1Document5 pagesConf 1sujithadharani9813No ratings yet
- Simulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDocument9 pagesSimulation of Low Voltage Ride Through Capability of Wind Turbines With Doubly Fed Induction GeneratorDanny LiNo ratings yet
- ARTICULO de AerogeneradorDocument9 pagesARTICULO de AerogeneradorNelson Rafael Vicent RuedaNo ratings yet
- PSCAD Based Dynamic ModelingDocument7 pagesPSCAD Based Dynamic ModelingLalith KrishnanNo ratings yet
- Improvement of Power Quality in Wind Energy System Using StatcomDocument8 pagesImprovement of Power Quality in Wind Energy System Using StatcomRtkNo ratings yet
- Ijpeds - 15016 26406 1 PB PDFDocument11 pagesIjpeds - 15016 26406 1 PB PDFAbdelghani El OugliNo ratings yet
- 100107Document5 pages100107Vol2No1No ratings yet
- Steady State Analysis of PMSG PDFDocument16 pagesSteady State Analysis of PMSG PDF1balamanianNo ratings yet
- DC DC ConvertorDocument11 pagesDC DC ConvertorJyothiNo ratings yet
- Power Balancing Control For AC/DC MicrogridDocument8 pagesPower Balancing Control For AC/DC MicrogridInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Eea 63 1 2015 078 EN LP 000 PDFDocument10 pagesEea 63 1 2015 078 EN LP 000 PDFhamza gaNo ratings yet
- International Journal of Engineering Research and DevelopmentDocument9 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Rajaei 2010Document19 pagesRajaei 2010gerson gomesNo ratings yet
- Stability Enhancement of Wind Power System by Using Energy Capacitor SystemDocument4 pagesStability Enhancement of Wind Power System by Using Energy Capacitor SystemPriyanka GuptaNo ratings yet
- Speed Control OF WIND TURBINEDocument4 pagesSpeed Control OF WIND TURBINESHADDOWWNo ratings yet
- Loss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind FarmsDocument11 pagesLoss Evaluation of HVAC and HVDC Transmission Solutions For Large Offshore Wind Farmsmohon_eee03100% (2)
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- Impedance Spectroscopy: Theory, Experiment, and ApplicationsFrom EverandImpedance Spectroscopy: Theory, Experiment, and ApplicationsEvgenij BarsoukovNo ratings yet
- 23R1476 - 0 - M039-H - Info Only PDFDocument463 pages23R1476 - 0 - M039-H - Info Only PDFChristianChalcoGonzales100% (3)
- Format For 6th Semester Btech SynopsisDocument5 pagesFormat For 6th Semester Btech SynopsisVishal OjhaNo ratings yet
- Dist RelayDocument6 pagesDist RelaymakroumNo ratings yet
- Casio FX 3800PDocument6 pagesCasio FX 3800PRamiroRinconSuarezNo ratings yet
- 1 SolutionsDocument7 pages1 SolutionsSih AtiiNo ratings yet
- Rajiv Gandhi University of Knowledge Technologies MT3-Electrical TechnologyDocument5 pagesRajiv Gandhi University of Knowledge Technologies MT3-Electrical TechnologySrikanth AllamsettyNo ratings yet
- Siemens LFL1..Document18 pagesSiemens LFL1..lucasjohn1964No ratings yet
- Tnstrument Transformers (CT, PT) TheoryDocument6 pagesTnstrument Transformers (CT, PT) TheorySARAVANANo ratings yet
- 60KW Ricardo Open Diesel GensetDocument4 pages60KW Ricardo Open Diesel GensetnicolasNo ratings yet
- Chemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityDocument13 pagesChemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityNishith Naik100% (1)
- KX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)Document232 pagesKX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)ValeriiNo ratings yet
- 1.1.3 SoundDocument10 pages1.1.3 SoundAhsan WaheedNo ratings yet
- LDF4 50aDocument5 pagesLDF4 50aDamar Lukito WahyudiNo ratings yet
- FR7xx2 BrochureDocument4 pagesFR7xx2 BrochuredotatchuongNo ratings yet
- Kistler 603cDocument8 pagesKistler 603cVladimir ObradovicNo ratings yet
- I-Et-3010.00-5140-700-P4x-002 - K - Specification For Electrical Material An...Document208 pagesI-Et-3010.00-5140-700-P4x-002 - K - Specification For Electrical Material An...everton maldonadoNo ratings yet
- Manual Mesa PHONIC AM240 AM240D en EsDocument28 pagesManual Mesa PHONIC AM240 AM240D en EsJuanmaNo ratings yet
- GFK1645JDocument704 pagesGFK1645JArvind DeepNo ratings yet
- Hypotultra3 ManDocument128 pagesHypotultra3 ManAlexis Cháirez UlloaNo ratings yet
- Design Lab 3 ReportDocument5 pagesDesign Lab 3 Reportapi-489665585No ratings yet
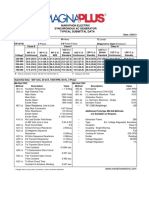
- Marathon Electric Synchronous Ac Generator Typical Submittal DataDocument2 pagesMarathon Electric Synchronous Ac Generator Typical Submittal Datamarkigldmm918No ratings yet
- 5 Channel Radio Remote Control Circuit Based of TX-2B - RX - 2B PairDocument9 pages5 Channel Radio Remote Control Circuit Based of TX-2B - RX - 2B PairSulianto BhirawaNo ratings yet
- ThesisDocument11 pagesThesistotktoNo ratings yet
- Total Mosa DetelDocument5 pagesTotal Mosa DetelapuNo ratings yet
- Delta Outdoor CabinetDocument2 pagesDelta Outdoor CabinetRichard ThainkhaNo ratings yet
- Menu de Del Baofeng Uv82Document9 pagesMenu de Del Baofeng Uv82Jose Riera100% (1)