Download as pdf or txt
You might also like
- Robust Autonomous Navigation of Unmanned Aerial Vehicles (Uavs) For Warehouses' Inventory ApplicationDocument7 pagesRobust Autonomous Navigation of Unmanned Aerial Vehicles (Uavs) For Warehouses' Inventory ApplicationAdeeba AliNo ratings yet
- Fault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringDocument12 pagesFault-Tolerant Cooperative Navigation of Networked UAV Swarms For Forest Fire MonitoringSuhas DevmaneNo ratings yet
- Multi-Agent Tasks Scheduling For Coordinated Actions of Unmanned Aerial Vehicles Acting in GroupDocument7 pagesMulti-Agent Tasks Scheduling For Coordinated Actions of Unmanned Aerial Vehicles Acting in GroupQuoc Phong PhamNo ratings yet
- B Paper MadridConference PlagiarismDocument1 pageB Paper MadridConference PlagiarismAdeeba AliNo ratings yet
- Performance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorDocument15 pagesPerformance Evaluation of Multi-UAV System in Post-Disaster Application: Validated by HITL SimulatorMarko SimićNo ratings yet
- Entropy 25 00853 With CoverDocument15 pagesEntropy 25 00853 With CoverDemie RedNo ratings yet
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument23 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetNo ratings yet
- Addis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer EngineeringDocument22 pagesAddis Ababa University Addis Ababa Institute of Technology School of Electrical and Computer Engineeringbegziew getnetNo ratings yet
- Sandino U2Document14 pagesSandino U2OM SARDESAI225286No ratings yet
- Decision Process of Autonomous Drones For Environmental MonitoringDocument6 pagesDecision Process of Autonomous Drones For Environmental MonitoringPeterPanNo ratings yet
- Cobertura Optima UAV CortadoDocument11 pagesCobertura Optima UAV CortadoPabloNo ratings yet
- Robotics: Cooperative Optimization of Uavs Formation Visual TrackingDocument22 pagesRobotics: Cooperative Optimization of Uavs Formation Visual TrackingEngMohamedReyadHelesyNo ratings yet
- Swarm Technology in Drones and Its ApplicationsDocument20 pagesSwarm Technology in Drones and Its Applicationskishan31080210No ratings yet
- Electronics 11 04187 v2Document33 pagesElectronics 11 04187 v2mm123No ratings yet
- Accurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Document8 pagesAccurate Indoor Mapping Using An Autonomous Unmanned Aerial Vehicle (UAV)Andy FloresNo ratings yet
- Recent Advances in Control and Instrumentation of Unmanned Aerial VehiclesDocument7 pagesRecent Advances in Control and Instrumentation of Unmanned Aerial Vehicleswovaj97072No ratings yet
- Review PaperDocument15 pagesReview Paperdre98makNo ratings yet
- 1 s2.0 S0167739X18325299 MainDocument9 pages1 s2.0 S0167739X18325299 Mainroi.ho2706No ratings yet
- Unmanned Aerial Vehicles A Literature ReviewDocument18 pagesUnmanned Aerial Vehicles A Literature Reviewshaaban.aliNo ratings yet
- An Optimal Scheme To Recharge Communication Drones: Edgar Arribas Vicent Cholvi Vincenzo MancusoDocument6 pagesAn Optimal Scheme To Recharge Communication Drones: Edgar Arribas Vicent Cholvi Vincenzo MancusoEdgar Arribas GimenoNo ratings yet
- Crowd Detection For Drone Safe Landing LNCS TemplateDocument12 pagesCrowd Detection For Drone Safe Landing LNCS TemplateRohit HatkarNo ratings yet
- FinishedfDocument20 pagesFinishedfkushalgayathri007No ratings yet
- Training Autonomous Drones for Search and Rescue with Convolutional Autoencoder-Document47 pagesTraining Autonomous Drones for Search and Rescue with Convolutional Autoencoder-amal.es23No ratings yet
- Preprints201811 0601 v1 PDFDocument19 pagesPreprints201811 0601 v1 PDFSatrio CiptoNo ratings yet
- Drones 05 00098 v2Document18 pagesDrones 05 00098 v2Georgios CostopNo ratings yet
- Air TO Air UAV DETECTIONDocument3 pagesAir TO Air UAV DETECTIONthinkableofficialhandleNo ratings yet
- Sensors 22 09180 v4Document13 pagesSensors 22 09180 v4liuNo ratings yet
- Multi Agent Reinforcement Learning Based Resource Allocation ForDocument15 pagesMulti Agent Reinforcement Learning Based Resource Allocation Forlukasmuench640No ratings yet
- 10 3390@drones3030058Document14 pages10 3390@drones3030058XxgametrollerxXNo ratings yet
- Field Coverage For Weed Mapping: Toward Experiments With A UAV SwarmDocument16 pagesField Coverage For Weed Mapping: Toward Experiments With A UAV SwarmTerra visionNo ratings yet
- EFFECTIVE FOREST FIRE DETECTION SYSTEM USING VISUAL IMAGES AND UNMANNED AERIAL VEHICLE Ijariie10993Document10 pagesEFFECTIVE FOREST FIRE DETECTION SYSTEM USING VISUAL IMAGES AND UNMANNED AERIAL VEHICLE Ijariie10993Hrutuj ShirkeNo ratings yet
- Unmanned Aerial Vehicle Classification Application PDFDocument20 pagesUnmanned Aerial Vehicle Classification Application PDF083898025012No ratings yet
- Abbreviated UAV Cloud Integration Proposal - (Katende Marvin and Ayebare Anil Pelice)Document5 pagesAbbreviated UAV Cloud Integration Proposal - (Katende Marvin and Ayebare Anil Pelice)Marvin KatendeNo ratings yet
- UAV1Document17 pagesUAV1TamerZakiFouadNo ratings yet
- Remotesensing 14 03908Document17 pagesRemotesensing 14 03908Tekletsadik TeketelNo ratings yet
- Remote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceDocument29 pagesRemote Sensing: A Review On Iot Deep Learning Uav Systems For Autonomous Obstacle Detection and Collision AvoidanceMatheus Cardoso SantosNo ratings yet
- Swarm Coordination of Mini-Uavs For Target Search Using Imperfect SensorsDocument28 pagesSwarm Coordination of Mini-Uavs For Target Search Using Imperfect SensorsAfework BezieNo ratings yet
- Position Controlling of A Flapper Drone Using UWBDocument9 pagesPosition Controlling of A Flapper Drone Using UWBMysa ChakrapaniNo ratings yet
- Comparative Study of Indoor Navigation S-1Document11 pagesComparative Study of Indoor Navigation S-1Jayashree T R 21PHD1140No ratings yet
- 2011 - Instantaneous Autonomous Aerial Reconnaissance For Civil Applications - A UAV Based Approach To Support Security and Rescue ForcesDocument5 pages2011 - Instantaneous Autonomous Aerial Reconnaissance For Civil Applications - A UAV Based Approach To Support Security and Rescue ForcesAni DalalNo ratings yet
- Applied SciencesDocument16 pagesApplied SciencesnarinderNo ratings yet
- Paper 4Document10 pagesPaper 4S U B R O 0No ratings yet
- Miniature Uav and Future Electronic Warfare PDFDocument13 pagesMiniature Uav and Future Electronic Warfare PDFl k100% (2)
- Research PaperDocument9 pagesResearch PaperShashi sidhwaniNo ratings yet
- 1 s2.0 S1874490723000769 MainDocument21 pages1 s2.0 S1874490723000769 MainHANS MAYCOL VICENTE ALEJANDRONo ratings yet
- Applsci 13 11548 v3Document19 pagesApplsci 13 11548 v3apexcindy27No ratings yet
- Trajectory Path Control of Multiple Unmanned Aerial VehiclesDocument4 pagesTrajectory Path Control of Multiple Unmanned Aerial VehiclesdormentryNo ratings yet
- Particle Swarm OptimisationDocument16 pagesParticle Swarm OptimisationdoraemonNo ratings yet
- Adoni 2023Document37 pagesAdoni 2023realabnzn8No ratings yet
- Sensors: Cloud-Assisted Uav Data Collection For Multiple Emerging Events in Distributed WsnsDocument13 pagesSensors: Cloud-Assisted Uav Data Collection For Multiple Emerging Events in Distributed WsnsJiwa Bin AbdullahNo ratings yet
- Design and Fabrication of Fire Extinguishing Drone Using CO2 Ball and SprayerDocument8 pagesDesign and Fabrication of Fire Extinguishing Drone Using CO2 Ball and SprayerIJRASETPublicationsNo ratings yet
- 2-Distributed Formation and Reconfiguration Control of VTOL UAVsDocument8 pages2-Distributed Formation and Reconfiguration Control of VTOL UAVsWaqas HussainNo ratings yet
- UAv Detection Complex Backgrounds and Rainy ConditionsDocument9 pagesUAv Detection Complex Backgrounds and Rainy Conditionscharliee8001No ratings yet
- Energy Efficient Joint UAV Secure Communication and 3D Trajecto 2022 DefenceDocument7 pagesEnergy Efficient Joint UAV Secure Communication and 3D Trajecto 2022 DefenceMuh hasan FaharuddinNo ratings yet
- RF-UAVNet High-Performance Convolutional Network For RF-Based Drone Surveillance SystemsDocument12 pagesRF-UAVNet High-Performance Convolutional Network For RF-Based Drone Surveillance Systemsabyasingh04No ratings yet
- Swarm Intelligence Based Approach For Real Time UAV Team Coordination in Search OperationsDocument7 pagesSwarm Intelligence Based Approach For Real Time UAV Team Coordination in Search OperationsRokeshuvarajNo ratings yet
- Communications and Control For Wireless Drone-Based Antenna ArrayDocument15 pagesCommunications and Control For Wireless Drone-Based Antenna ArraySyafiqah YazidNo ratings yet
- Accelerating Power Grid Monitoring With Flying Robots and Artificial IntelligenceDocument7 pagesAccelerating Power Grid Monitoring With Flying Robots and Artificial IntelligencebenlahnecheNo ratings yet
- Paper DLRK2017 Temme Trempler UAV Into Airport OperationsDocument11 pagesPaper DLRK2017 Temme Trempler UAV Into Airport OperationsOlanrewaju EmmanuelNo ratings yet
- Collision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control AlgorithmDocument11 pagesCollision Avoidance in Fixed-Wing UAV Formation Flight Based On A Consensus Control Algorithmphantuan8antNo ratings yet
- Unlocking the Lower Skies: The Costs and Benefits of Deploying Drones across Use Cases in East AfricaFrom EverandUnlocking the Lower Skies: The Costs and Benefits of Deploying Drones across Use Cases in East AfricaNo ratings yet
- JournalPaper ASC UpdatedDocument16 pagesJournalPaper ASC UpdatedAdeeba AliNo ratings yet
- B Paper MadridConference PlagiarismDocument1 pageB Paper MadridConference PlagiarismAdeeba AliNo ratings yet
- Autonomous Unmanned Aerial Vehicle Navigation Using Reinforcement Learning: A Systematic ReviewDocument24 pagesAutonomous Unmanned Aerial Vehicle Navigation Using Reinforcement Learning: A Systematic ReviewAdeeba AliNo ratings yet
- 1622 Graph Convolutional ReinforcemDocument13 pages1622 Graph Convolutional ReinforcemAdeeba AliNo ratings yet
- Research Article Federated Reinforcement Learning-Based UAV Swarm System For Aerial Remote SensingDocument15 pagesResearch Article Federated Reinforcement Learning-Based UAV Swarm System For Aerial Remote SensingAdeeba AliNo ratings yet
- SPINPaper3 Final EdittedDocument10 pagesSPINPaper3 Final EdittedAdeeba AliNo ratings yet
- Challenges and Opportunities in Deep Reinforcement Learning With Graph Neural Networks: A Comprehensive Review of Algorithms and ApplicationsDocument19 pagesChallenges and Opportunities in Deep Reinforcement Learning With Graph Neural Networks: A Comprehensive Review of Algorithms and ApplicationsAdeeba AliNo ratings yet
- 3068 Structure Aware Transformer PoDocument19 pages3068 Structure Aware Transformer PoAdeeba AliNo ratings yet
- Cooperative Relative Uav Attitude Estimation Using Doa and RF PolarizationDocument12 pagesCooperative Relative Uav Attitude Estimation Using Doa and RF PolarizationAdeeba AliNo ratings yet
- Ch. 3 The Immutable Archetypes and A Remark Concerning The Manifestations of The NamesDocument9 pagesCh. 3 The Immutable Archetypes and A Remark Concerning The Manifestations of The NamesAdeeba AliNo ratings yet
- Output-Feedback Image-Based Visual Servoing For Multirotor Unmanned Aerial Vehicle Line FollowingDocument14 pagesOutput-Feedback Image-Based Visual Servoing For Multirotor Unmanned Aerial Vehicle Line FollowingAdeeba AliNo ratings yet
- IbnArabiConcept OfdreamsDocument28 pagesIbnArabiConcept OfdreamsAdeeba AliNo ratings yet
- Inception and Ibn 'ArabiDocument40 pagesInception and Ibn 'ArabiAdeeba AliNo ratings yet
- Low-Altitude Navigation For Multi-Rotor Drones in Urban AreasDocument16 pagesLow-Altitude Navigation For Multi-Rotor Drones in Urban AreasAdeeba AliNo ratings yet
- Combined Quaternion-Based Error State Kalman Filtering and Smooth Variable Structure Filtering For Robust Attitude EstimationDocument16 pagesCombined Quaternion-Based Error State Kalman Filtering and Smooth Variable Structure Filtering For Robust Attitude EstimationAdeeba AliNo ratings yet
- An Algorithm of Reactive Collision Free 3D Deployment of Networked Unmanned Aerial Vehicles For Surveillance and MonitoringDocument9 pagesAn Algorithm of Reactive Collision Free 3D Deployment of Networked Unmanned Aerial Vehicles For Surveillance and MonitoringAdeeba AliNo ratings yet
- Autonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMDocument6 pagesAutonomous Flight and Obstacle Avoidance of A Quadrotor by Monocular SLAMAdeeba AliNo ratings yet
- Single Landmark Distance-Based NavigationDocument8 pagesSingle Landmark Distance-Based NavigationAdeeba AliNo ratings yet
- Adaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesDocument8 pagesAdaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesAdeeba AliNo ratings yet
- Visual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMDocument6 pagesVisual-Inertial Fusion For Indoor Autonomous Navigation of A Quadrotor Using ORB-SLAMAdeeba AliNo ratings yet
- Full Download Heat Pumps 2nd Edition Silberstein Solutions Manual PDF Full ChapterDocument36 pagesFull Download Heat Pumps 2nd Edition Silberstein Solutions Manual PDF Full Chaptermeawcocklofttp47100% (20)
- QP-3HB Series: Dimension (MM)Document2 pagesQP-3HB Series: Dimension (MM)danila99No ratings yet
- Twitter SLDDocument1 pageTwitter SLDMohamed ShafeyNo ratings yet
- C-NEToran Technologies VSAT INTERNET LINK QUOTE 4-10-2021Document2 pagesC-NEToran Technologies VSAT INTERNET LINK QUOTE 4-10-2021kayode AdebayoNo ratings yet
- Anantara Sahara Toseur Resort & VillasDocument14 pagesAnantara Sahara Toseur Resort & Villassami ullahNo ratings yet
- MXR Evh5150 Overdrive Manual 479917Document2 pagesMXR Evh5150 Overdrive Manual 479917Μαριτίνα ΑλεξίουNo ratings yet
- The Impact of Social Media On Students AryannaDocument18 pagesThe Impact of Social Media On Students Aryannaclent balabaNo ratings yet
- M500M Manual I56-3855Document2 pagesM500M Manual I56-3855Projects aissolNo ratings yet
- Грузовзвес Ds EuroDocument12 pagesГрузовзвес Ds EuroВлад ТелеNo ratings yet
- 20466C: Implementing Data Models and Reports With Microsoft SQL Server 2014Document9 pages20466C: Implementing Data Models and Reports With Microsoft SQL Server 2014Jose LuisNo ratings yet
- Department of Social Services (DSS) : User Id: LaansiDocument1 pageDepartment of Social Services (DSS) : User Id: LaansiMD ARIF HOSSAIN KHANNo ratings yet
- DCS AH-64D Quick Start Manual ENDocument361 pagesDCS AH-64D Quick Start Manual ENAMVIGrape100% (1)
- Hac - Pilot Competencies For Helicopter Wildfire OpsDocument26 pagesHac - Pilot Competencies For Helicopter Wildfire OpsPablo Sánchez100% (1)
- 2023 Debian LampDocument4 pages2023 Debian Lampfajar.suryantoro72No ratings yet
- Cryptography Session 2020 v1Document98 pagesCryptography Session 2020 v1GlmNo ratings yet
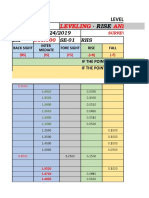
- Leveling AND Calculation: - Rise Fall MethodeDocument9 pagesLeveling AND Calculation: - Rise Fall MethodeKhajaNo ratings yet
- Intel Logo: Trademark and Logo Usage Guidelines - 3rd PartyDocument10 pagesIntel Logo: Trademark and Logo Usage Guidelines - 3rd PartyНикита ЖевлаковNo ratings yet
- IFS Engine MRODocument8 pagesIFS Engine MROCarlos CastNo ratings yet
- Egger Iris LeafletDocument2 pagesEgger Iris LeafletEdg MerlínNo ratings yet
- DWDM LAB Manual SVEC-16Document8 pagesDWDM LAB Manual SVEC-16Pottli SiddhuNo ratings yet
- Question: 5. Flexible-Budget Preparation and Analysis Bank ManagemeDocument3 pagesQuestion: 5. Flexible-Budget Preparation and Analysis Bank Managemeoras attaNo ratings yet
- Module 1 POP NotesDocument41 pagesModule 1 POP NotesDeepikaNo ratings yet
- Computer Aided DesignDocument51 pagesComputer Aided DesignshranjuNo ratings yet
- POS Interface Materials Control MICROS Simphony 2.xDocument35 pagesPOS Interface Materials Control MICROS Simphony 2.xRanko LazeskiNo ratings yet
- Gis 1Document36 pagesGis 1Jaspreet KapoorNo ratings yet
- Upgrade From ECC 4.6 To ECC 6Document13 pagesUpgrade From ECC 4.6 To ECC 6prem_09No ratings yet
- CMT2189A Datasheet-EN-V0.8-2020915Document67 pagesCMT2189A Datasheet-EN-V0.8-2020915Rudraksh GandharvaNo ratings yet
- RStudio IDEDocument8 pagesRStudio IDEravi kiranNo ratings yet
- BT LHM 300Document4 pagesBT LHM 300Laszlo SzatmaryNo ratings yet
- Chp2 - Practice 2 - Ans-1Document5 pagesChp2 - Practice 2 - Ans-1Nur AthirahNo ratings yet