Download as pdf or txt
You might also like
- Risk Assessment - HV 11kV Cable, Joint & TerminationDocument90 pagesRisk Assessment - HV 11kV Cable, Joint & TerminationJobish PK0% (2)
- Machine Learning 2: Exercise Sheet 2Document1 pageMachine Learning 2: Exercise Sheet 2Surya Iyer0% (1)
- SinhaDu16 PDFDocument20 pagesSinhaDu16 PDFÜmit AslanNo ratings yet
- Problem Set 3Document3 pagesProblem Set 3Yash VarunNo ratings yet
- Knapsack Problems: I. HistoryDocument7 pagesKnapsack Problems: I. HistoryHavisNo ratings yet
- ' - Magic: Recovery of Sparse Signals Via Convex ProgrammingDocument19 pages' - Magic: Recovery of Sparse Signals Via Convex ProgrammingLan VũNo ratings yet
- Fast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaDocument7 pagesFast Support Vector Classifier With Quantile: School of Mathematical Sciences, Inner Mongolia University, ChinaJagan J Jagan JNo ratings yet
- Week5 SWIDocument3 pagesWeek5 SWIAditya PaharwaNo ratings yet
- Lec 18Document6 pagesLec 18Arthur CostaNo ratings yet
- Support Vector Machine Classification Algorithm and Its ApplicationDocument8 pagesSupport Vector Machine Classification Algorithm and Its Application0191720003 ELIAS ANTONIO BELLO LEON ESTUDIANTE ACTIVONo ratings yet
- CH09 Variational FormulationDocument49 pagesCH09 Variational FormulationRanjit Koshy AlexanderNo ratings yet
- A New Branch and Bound Algorithm For Integer Quadratic Programming-2016Document12 pagesA New Branch and Bound Algorithm For Integer Quadratic Programming-2016Shah AzNo ratings yet
- Lecture 7: Least-Squares Problem: Convex OptimizationDocument7 pagesLecture 7: Least-Squares Problem: Convex OptimizationBer Love CharmedNo ratings yet
- A Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersDocument12 pagesA Qubo Formulation of Minimum Multicut Problem Instances in Trees For D-Wave Quantum AnnealersRodrigoNo ratings yet
- Variable Fixing Method by Weighted Average For The Continuous Quadratic Knapsack ProblemDocument15 pagesVariable Fixing Method by Weighted Average For The Continuous Quadratic Knapsack ProblemJônatas Oliveira SilvaNo ratings yet
- DOS - ReportDocument25 pagesDOS - ReportSagar SimhaNo ratings yet
- Neural Network Learning Dynamics Analysis: Articles You May Be Interested inDocument5 pagesNeural Network Learning Dynamics Analysis: Articles You May Be Interested inerick ramosNo ratings yet
- Lecture19 20 21Document14 pagesLecture19 20 21915431916No ratings yet
- An Introduction To Quantum Annealing: Diego de Falco and Dario TamascelliDocument22 pagesAn Introduction To Quantum Annealing: Diego de Falco and Dario TamascelliKithminNo ratings yet
- Manuscript Submitted To AIMS' Journals Volume X, Number 0X, XX 200XDocument18 pagesManuscript Submitted To AIMS' Journals Volume X, Number 0X, XX 200XSufyanNo ratings yet
- Nonlinear Programming 3rd Edition Theoretical Solutions ManualDocument33 pagesNonlinear Programming 3rd Edition Theoretical Solutions ManualJigo CasteloNo ratings yet
- I. Introduction To Convex Optimization: Georgia Tech ECE 8823a Notes by J. Romberg. Last Updated 13:32, January 11, 2017Document20 pagesI. Introduction To Convex Optimization: Georgia Tech ECE 8823a Notes by J. Romberg. Last Updated 13:32, January 11, 2017zeldaikNo ratings yet
- Slides Lecture7 ExtDocument21 pagesSlides Lecture7 ExtMuhammad ZeeshanNo ratings yet
- Lasso SVMDocument6 pagesLasso SVMRaja Ben CharradaNo ratings yet
- Support Vector Machine in R PaperDocument28 pagesSupport Vector Machine in R PaperzhaozilongNo ratings yet
- Detection of Temporal Bone Abnormalities Using Hybrid Wavelet Support Vector Machine ClassificationDocument6 pagesDetection of Temporal Bone Abnormalities Using Hybrid Wavelet Support Vector Machine ClassificationsaahithyaalagarsamyNo ratings yet
- Approx Lecture03-5 LPDocument9 pagesApprox Lecture03-5 LPatemp9595No ratings yet
- HW2 SolutionDocument9 pagesHW2 SolutionLê QuânNo ratings yet
- HW 4Document7 pagesHW 4Angel AvilaNo ratings yet
- Boolean Functions and Artificial Neural NetworksDocument29 pagesBoolean Functions and Artificial Neural NetworksManprabodh Singh SandhuNo ratings yet
- ANN 3 - PerceptronDocument56 pagesANN 3 - PerceptronNwwar100% (1)
- Kernel Method and Support Vector Machines: Nguyen Duc Dung, Ph.D. Ioit, VastDocument34 pagesKernel Method and Support Vector Machines: Nguyen Duc Dung, Ph.D. Ioit, VastMinh LeNo ratings yet
- 16 Primal DualDocument20 pages16 Primal Dualdexxt0rNo ratings yet
- Machine Learning Course - Kernel RegressionDocument9 pagesMachine Learning Course - Kernel RegressionnagybalyNo ratings yet
- Opt2017 Part1Document48 pagesOpt2017 Part1Co londota2No ratings yet
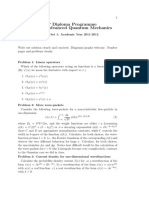
- Quantum Mechanics B SPA6413 Problemset 1Document1 pageQuantum Mechanics B SPA6413 Problemset 1Shams KhanNo ratings yet
- Lecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksDocument70 pagesLecture Three Multi-Layer Perceptron: Backpropagation: Part I: Fundamentals of Neural NetworksWantong LiaoNo ratings yet
- Neural Networks ThreeDocument60 pagesNeural Networks Threejunleeeeee3No ratings yet
- Vmls Additional ExercisesDocument66 pagesVmls Additional ExercisesmarcosilvasegoviaNo ratings yet
- Fast Kernel ClassifiersDocument41 pagesFast Kernel ClassifiersEliseo LopezNo ratings yet
- Convex Optimization in Classification Problems: MIT/ORC Spring SeminarDocument39 pagesConvex Optimization in Classification Problems: MIT/ORC Spring SeminarPatrick O'RourkeNo ratings yet
- Support Vector MachinesDocument14 pagesSupport Vector Machineszzztimbo100% (5)
- Homework2 v1.0Document5 pagesHomework2 v1.0royadaneshi2001No ratings yet
- Admm HomeworkDocument5 pagesAdmm HomeworkNurul Hidayanti AnggrainiNo ratings yet
- Perceptons Neural NetworksDocument33 pagesPerceptons Neural Networksvasu_koneti5124No ratings yet
- HW 1Document7 pagesHW 1Lakhdari AbdelhalimNo ratings yet
- SVMDocument21 pagesSVMbudi_ummNo ratings yet
- Club de F Sica Te RicaDocument2 pagesClub de F Sica Te RicaDaniel TorresNo ratings yet
- 05 Lecture - ILP-and-dualityDocument8 pages05 Lecture - ILP-and-dualityshimaNo ratings yet
- Regularization Methods and Fixed Point Algorithms For A Ne Rank Minimization ProblemsDocument28 pagesRegularization Methods and Fixed Point Algorithms For A Ne Rank Minimization ProblemsVanidevi ManiNo ratings yet
- Sparse Regression and Dictionary LearningDocument14 pagesSparse Regression and Dictionary LearningmamurtazaNo ratings yet
- Solving Bilevel Programs With The KKT-approach: Gemayqzel Bouza AllendeDocument24 pagesSolving Bilevel Programs With The KKT-approach: Gemayqzel Bouza Allendeetn arhivNo ratings yet
- SVM TutorialDocument34 pagesSVM Tutoriallalithkumar_93No ratings yet
- Solving Ecdlp As QUBODocument7 pagesSolving Ecdlp As QUBOyootboot08No ratings yet
- Selected ProblemsDocument11 pagesSelected Problemsasanithanair35No ratings yet
- Support Vector Machines: Logisic RegressionDocument10 pagesSupport Vector Machines: Logisic Regressionahmadmanhal673No ratings yet
- 3 Non Linear ClassifiersDocument74 pages3 Non Linear ClassifiersVaishali DNo ratings yet
- Gradient Descent On Infinitely Wide Neural Networks: Global Convergence and GeneralizationDocument21 pagesGradient Descent On Infinitely Wide Neural Networks: Global Convergence and GeneralizationjohnNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lorus Watch Manual PDFDocument2 pagesLorus Watch Manual PDFDave Long100% (1)
- SimbuDocument3 pagesSimbu84- R. SilamabarasanNo ratings yet
- Simply Supported Reinforced Concrete Beam Analysis and Design (ACI 318-14)Document33 pagesSimply Supported Reinforced Concrete Beam Analysis and Design (ACI 318-14)Anonymous ARMtmNKL100% (1)
- Data Sheet CryStal NvisionDocument10 pagesData Sheet CryStal Nvisionjulio cesar medinaNo ratings yet
- Craft Revival ProjectDocument3 pagesCraft Revival Projectkoshalsra3No ratings yet
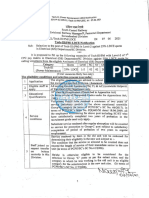
- 1623672204308-Selection To The Post of Tech-III (PM)Document8 pages1623672204308-Selection To The Post of Tech-III (PM)atalrawat205No ratings yet
- Cmcsseminarnand 160523111422 PDFDocument16 pagesCmcsseminarnand 160523111422 PDFKarthick PrasadNo ratings yet
- Training and Development: 06/30/2022 HRM Chapter 5 - Truong Nu To Giang 1Document54 pagesTraining and Development: 06/30/2022 HRM Chapter 5 - Truong Nu To Giang 1Trần LuânNo ratings yet
- Agri CollegesDocument4 pagesAgri Collegesjaimaruthi internetnamakkalNo ratings yet
- Checking of Forms Sample TemplateDocument3 pagesChecking of Forms Sample TemplateMilain NabiaNo ratings yet
- Answer All Questions Briefly and Correctly!: and Reading Comprehension. According To Your Opinion, Which One The MoreDocument2 pagesAnswer All Questions Briefly and Correctly!: and Reading Comprehension. According To Your Opinion, Which One The Moreita miftahussaidahNo ratings yet
- 4k Solar Camera FlyerDocument4 pages4k Solar Camera FlyerElvis EmilianoNo ratings yet
- MechanismsDocument22 pagesMechanismssilva, april joy c.No ratings yet
- Prediction of Information Diffusion Probabilities For Independent Cascade ModelDocument9 pagesPrediction of Information Diffusion Probabilities For Independent Cascade ModelMichał StaniszewskiNo ratings yet
- Maths Memo Grade 8 June 2011 1Document4 pagesMaths Memo Grade 8 June 2011 123mofokengbokangNo ratings yet
- 2020engg Cap2 CutoffDocument1,115 pages2020engg Cap2 Cutofframeshdorage12No ratings yet
- Cryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownDocument30 pagesCryptography and Network Security: Third Edition by William Stallings Lecture Slides by Lawrie BrownEli PriyatnaNo ratings yet
- Inspection and Heat Treatment SummaryDocument1 pageInspection and Heat Treatment SummaryJoelCristobalNo ratings yet
- APADocument2 pagesAPANovianto Dwi putraNo ratings yet
- EXAM in Statistics and ProbabilityDocument7 pagesEXAM in Statistics and Probabilityjennilyn bulaonNo ratings yet
- B. InggrisDocument2 pagesB. Inggristoko fahmiNo ratings yet
- Steel Grade: Material Data SheetDocument8 pagesSteel Grade: Material Data SheetSlobodan NocajNo ratings yet
- Before, After - Vocabulary: English Ponunciation MeaningDocument3 pagesBefore, After - Vocabulary: English Ponunciation MeaningJuan Carlos Rodriguez LopezNo ratings yet
- MALAKIA M N CV - MDocument5 pagesMALAKIA M N CV - Mmalakiam50No ratings yet
- Terhadap Pola Hidup Sehat Masyarakat Kecamatan PrambananDocument10 pagesTerhadap Pola Hidup Sehat Masyarakat Kecamatan PrambananNurul HidayatNo ratings yet
- Cot1 DLPDocument11 pagesCot1 DLPNelvie DatuNo ratings yet
- Suggested ProjectsDocument2 pagesSuggested ProjectsCadever Y.TNo ratings yet
- Tribes in The Dark Quickstart (32317351)Document61 pagesTribes in The Dark Quickstart (32317351)jvmarron100% (1)
- Unit-1 Chemistry (Matter) Lesson 1-A Properties of Matter-Solid, Liquid, and Gas (Grade 3) ObjectivesDocument16 pagesUnit-1 Chemistry (Matter) Lesson 1-A Properties of Matter-Solid, Liquid, and Gas (Grade 3) Objectiveshaizelle resmaNo ratings yet