Download as pdf or txt
You might also like
- Year 12 Mathematics BDocument511 pagesYear 12 Mathematics Bkatemurtagh395% (22)
- AgileScrumCheatSheet PDFDocument1 pageAgileScrumCheatSheet PDFsimish123No ratings yet
- 11 LearningDocument25 pages11 LearningPratik Pradip SarodeNo ratings yet
- Markov Decision Process and Reinforcement LearningDocument36 pagesMarkov Decision Process and Reinforcement LearningJohn GreenNo ratings yet
- Lecture 8 - Gradient Descent, Learning Models, Loss Functions (DONE!!) PDFDocument37 pagesLecture 8 - Gradient Descent, Learning Models, Loss Functions (DONE!!) PDFSharelle TewNo ratings yet
- Data in MLDocument26 pagesData in MLPurnama GamingNo ratings yet
- Software Testing - Best Practice: Testing Checklist The Testing LifecycleDocument1 pageSoftware Testing - Best Practice: Testing Checklist The Testing LifecycleNidal ChoumanNo ratings yet
- ICRA2024 IRL Reward Shaping WuDocument8 pagesICRA2024 IRL Reward Shaping Wukkanishk2023No ratings yet
- Business Research Methods Slot 4: Mon. 10.45-12.15 Fri. 4.00-5.30 Instructor: (Guest Faculty) EmailDocument26 pagesBusiness Research Methods Slot 4: Mon. 10.45-12.15 Fri. 4.00-5.30 Instructor: (Guest Faculty) EmailVismit PariharNo ratings yet
- Machine Learning: Mona Leeza Email: Monaleeza - Bukc@bahria - Edu.pkDocument60 pagesMachine Learning: Mona Leeza Email: Monaleeza - Bukc@bahria - Edu.pkzombiee hookNo ratings yet
- Coaching Work FlowDocument1 pageCoaching Work FlowHerrylanNo ratings yet
- CoCoMo Seminar KaranDocument19 pagesCoCoMo Seminar Karanbhandari.karanNo ratings yet
- Project Timebox OverviewDocument7 pagesProject Timebox OverviewRonaldvdMScribdNo ratings yet
- INSY662 - F23 - Week 3-1Document22 pagesINSY662 - F23 - Week 3-1lakshyaagrwlNo ratings yet
- The Toyota WayDocument27 pagesThe Toyota WaykzamandarusNo ratings yet
- Introduction To Machine LearningDocument24 pagesIntroduction To Machine Learningharith danishNo ratings yet
- Hyperion Training DetailsDocument19 pagesHyperion Training DetailsAmit SharmaNo ratings yet
- Poster CPODocument2 pagesPoster CPOCamara OumarNo ratings yet
- Logistics: CSE 473 Markov Decision ProcessesDocument10 pagesLogistics: CSE 473 Markov Decision ProcessesOtong noxNo ratings yet
- CH 2 SM ChartDocument2 pagesCH 2 SM ChartVaish KiranNo ratings yet
- Statistics and ProbabilityDocument14 pagesStatistics and ProbabilityElla Q. EngcoNo ratings yet
- Arbre Decision 2324 4p 1 11Document11 pagesArbre Decision 2324 4p 1 11souidiamel7No ratings yet
- Financial TrainingsDocument1 pageFinancial TrainingssyedmeharNo ratings yet
- Ref LSSGB Reference Materialv15 01022023130423Document415 pagesRef LSSGB Reference Materialv15 01022023130423saket kumarNo ratings yet
- Highest Enabling Strategy To Use in Developing The Highest Thinking Skill To Assess Enabling General Strategy Flexible Learning Strategies (FLS)Document10 pagesHighest Enabling Strategy To Use in Developing The Highest Thinking Skill To Assess Enabling General Strategy Flexible Learning Strategies (FLS)Mikkaella RimandoNo ratings yet
- AI 11 Reinforcement Learning IIDocument35 pagesAI 11 Reinforcement Learning IIhumanbody22No ratings yet
- Impact MappingDocument1 pageImpact Mappingapi-19967718No ratings yet
- Hyperion Learning Path - EssbaseDocument18 pagesHyperion Learning Path - EssbaseAmit SharmaNo ratings yet
- Pioquid 07 Quiz 1Document3 pagesPioquid 07 Quiz 1KimNo ratings yet
- HRM Lecture 4 Slides OnlyDocument16 pagesHRM Lecture 4 Slides Only晓冬亚军的二舅姥爷No ratings yet
- About Scrum A Management Framework DoingDocument6 pagesAbout Scrum A Management Framework Doingjose_lezama3889No ratings yet
- 8 DrefcardDocument2 pages8 DrefcardManopingsoft KrissManoNo ratings yet
- Lego WeDo Ramp Student WorksheetDocument3 pagesLego WeDo Ramp Student WorksheetKelly HonNo ratings yet
- Lec 20Document33 pagesLec 20kaveh1980No ratings yet
- Supervised LearningDocument210 pagesSupervised LearningRajachandra VoodigaNo ratings yet
- Apprenticeship Learning Via Inverse Reinforcement LearningDocument8 pagesApprenticeship Learning Via Inverse Reinforcement LearningDuong NghiaNo ratings yet
- SU Staff ID Model - CDocument1 pageSU Staff ID Model - CdmlordNo ratings yet
- Lecture 8Document7 pagesLecture 8Shamim HossainNo ratings yet
- 2021 PEAC TLE-ICT Online INSET-Required Outputs, Impt URLsDocument3 pages2021 PEAC TLE-ICT Online INSET-Required Outputs, Impt URLsGynxi NekoNo ratings yet
- ERP Implementation Methodology - NewDocument10 pagesERP Implementation Methodology - NewRonyNo ratings yet
- Toaz - Info Research 2 Cidam PRDocument7 pagesToaz - Info Research 2 Cidam PRRonelle San buenaventuraNo ratings yet
- DAT560G Entity RelationshipsDocument67 pagesDAT560G Entity Relationshipshaojie shiNo ratings yet
- Phase1 - Lean Six Sigma Green Belt - Training ProgrammeDocument235 pagesPhase1 - Lean Six Sigma Green Belt - Training ProgrammeDipayan Maji B23319100% (1)
- E1 Lean Six Sigma Green Beltv11institute 07072023191159Document220 pagesE1 Lean Six Sigma Green Beltv11institute 07072023191159Sasha ChandNo ratings yet
- Lecture 12Document48 pagesLecture 12adrienleeNo ratings yet
- Toaz - Info Fidp Research 2docxDocument12 pagesToaz - Info Fidp Research 2docxEmelinda IglopasNo ratings yet
- Competency Iceberg ModelDocument41 pagesCompetency Iceberg ModelHaseeb Ahmed100% (1)
- Flexible Instruction Delivery Plan (FIDP) : What To Teach?Document4 pagesFlexible Instruction Delivery Plan (FIDP) : What To Teach?Annie Rose Ansale JamandreNo ratings yet
- Algorithms: An Intelligent Coup AgentDocument1 pageAlgorithms: An Intelligent Coup AgentUmesh chugNo ratings yet
- Lecture7 MDPs IDocument9 pagesLecture7 MDPs IMamunur RashidNo ratings yet
- T6 Complete PDFDocument7 pagesT6 Complete PDFJavico VasquezNo ratings yet
- T6 Complete PDFDocument7 pagesT6 Complete PDFJavico VasquezNo ratings yet
- People Focussed InterventionsDocument3 pagesPeople Focussed Interventionsvlnarayanan1611No ratings yet
- Scrum PresentationDocument10 pagesScrum PresentationRugved BhiseNo ratings yet
- Quick Scrum PresentationDocument10 pagesQuick Scrum PresentationRugved BhiseNo ratings yet
- Wacm Cs Defining BehaviorDocument1 pageWacm Cs Defining BehaviorPriya Dubey SahNo ratings yet
- Me2110 Spring 2021 Lecture 05 DesignevaluationDocument28 pagesMe2110 Spring 2021 Lecture 05 DesignevaluationletphuongNo ratings yet
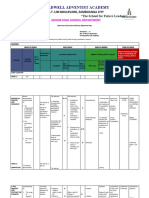
- Caldwell Adventist Academy: R.T. Lim Boulevard, Zamboanga City "The School For Future Leaders"Document9 pagesCaldwell Adventist Academy: R.T. Lim Boulevard, Zamboanga City "The School For Future Leaders"rosanie remotin50% (2)
- AgileScrumCheatSheet 1Document1 pageAgileScrumCheatSheet 1Jaya ShankarNo ratings yet
- Two-Minute Math Drills, Grades 5 - 8: Fractions & DecimalsFrom EverandTwo-Minute Math Drills, Grades 5 - 8: Fractions & DecimalsNo ratings yet
- DSR 2879Document25 pagesDSR 2879radha gulatiNo ratings yet
- Robust Constrained Generalized Correntropy and Maximum Versoria Criterion Adaptive FiltersDocument5 pagesRobust Constrained Generalized Correntropy and Maximum Versoria Criterion Adaptive Filtersradha gulatiNo ratings yet
- Depression Identification Using EEG Signals Via A Hybrid of LSTM and Spiking Neural NetworksDocument13 pagesDepression Identification Using EEG Signals Via A Hybrid of LSTM and Spiking Neural Networksradha gulatiNo ratings yet
- A Modified IPNLMS Algorithm Using System Sparseness: Genki Hirano and Tetsuya ShimamuraDocument4 pagesA Modified IPNLMS Algorithm Using System Sparseness: Genki Hirano and Tetsuya Shimamuraradha gulatiNo ratings yet
- Markov DecisionDocument11 pagesMarkov Decisionradha gulatiNo ratings yet
- Computer Vision - Unit 9 - Week 7Document4 pagesComputer Vision - Unit 9 - Week 7radha gulatiNo ratings yet
- Statistics For Engineers Lecture 4 Reliability and Lifetime DistributionsDocument21 pagesStatistics For Engineers Lecture 4 Reliability and Lifetime Distributionsradha gulatiNo ratings yet
- Introduction To SCILAB: Ece Department (Maharaja Agrasen Institute of Technology)Document24 pagesIntroduction To SCILAB: Ece Department (Maharaja Agrasen Institute of Technology)radha gulatiNo ratings yet
- Advanced Television Systems For Terrestrial Broadcasting: Some Problems and Some Proposed SolutionsDocument24 pagesAdvanced Television Systems For Terrestrial Broadcasting: Some Problems and Some Proposed Solutionsradha gulatiNo ratings yet
- Cdma Sparse Channel Estimation Using A Gsicam Algorithm For RadiDocument5 pagesCdma Sparse Channel Estimation Using A Gsicam Algorithm For Radiradha gulatiNo ratings yet
- Blind Multiuser Detection Based On Linear Constrained MmseDocument4 pagesBlind Multiuser Detection Based On Linear Constrained Mmseradha gulatiNo ratings yet
- College of Arts and Sciences: Module For Bpo 1 - Fundamentals of Bpo 1Document16 pagesCollege of Arts and Sciences: Module For Bpo 1 - Fundamentals of Bpo 1Neivil Jean N. EgoniaNo ratings yet
- LTE Radio - Basics & Practical Impelementation AspectsDocument58 pagesLTE Radio - Basics & Practical Impelementation AspectsThomas JacobNo ratings yet
- Risks To Maintenance During Plant ShutdownDocument23 pagesRisks To Maintenance During Plant ShutdownpiolinwallsNo ratings yet
- What Brings Smartness-Smart Meter/ Smart Analytics: Genus Power Infrastructures LimitedDocument17 pagesWhat Brings Smartness-Smart Meter/ Smart Analytics: Genus Power Infrastructures LimitedShung Tak ChanNo ratings yet
- BT LHM 300Document4 pagesBT LHM 300Laszlo SzatmaryNo ratings yet
- A Study On Properties of Glass Fiber Reinforced Self Compacting Concrete (GFRSCC) Using Fly AshDocument5 pagesA Study On Properties of Glass Fiber Reinforced Self Compacting Concrete (GFRSCC) Using Fly AshFyroz DadapeerNo ratings yet
- Jack MaDocument7 pagesJack MaAfridi IslamNo ratings yet
- Final SHT Roa 231161.4017 Master Non MSC 1 Step Charcoa Pt. Bintang Berkah Perkasa Dos 14 Juni 2023Document5 pagesFinal SHT Roa 231161.4017 Master Non MSC 1 Step Charcoa Pt. Bintang Berkah Perkasa Dos 14 Juni 2023ilokerindonesiaNo ratings yet
- Site Analysis PDFDocument2 pagesSite Analysis PDFakmaNo ratings yet
- Sugar VapozemDocument7 pagesSugar VapozemThe Sur StudioNo ratings yet
- Unified Custom Web Control V20 DOC enDocument33 pagesUnified Custom Web Control V20 DOC enmq6jbbbdnpNo ratings yet
- 01.01 TPB SubscriptionsDocument15 pages01.01 TPB SubscriptionsaNo ratings yet
- 12 - Chapter 4Document7 pages12 - Chapter 4Khushi LakhaniNo ratings yet
- Course Outline: - Computer SecurityDocument21 pagesCourse Outline: - Computer Securityابتهاج عبدالسلامNo ratings yet
- Catalogue 1100 1300Document40 pagesCatalogue 1100 1300soren rothausNo ratings yet
- BFA902 As BuiltDocument37 pagesBFA902 As Builtbenjamin paulinaNo ratings yet
- First Steps in SAP Controlling SampleDocument12 pagesFirst Steps in SAP Controlling Sampleanandbajaj00% (1)
- (SERVICE MANUAL) ) - CMP 200 Generator 200 XrayDocument371 pages(SERVICE MANUAL) ) - CMP 200 Generator 200 XrayGeorgiana Kokona100% (1)
- 947 ControlDocument117 pages947 ControlDavi SantosNo ratings yet
- RStudio IDEDocument8 pagesRStudio IDEravi kiranNo ratings yet
- SUMMARYDocument60 pagesSUMMARYFavour NwachukwuNo ratings yet
- Affidavit For DPWHDocument3 pagesAffidavit For DPWHGenevieve GayosoNo ratings yet
- Geofill LD Abandonment SpecDocument3 pagesGeofill LD Abandonment SpecMerluza, Ullys M.No ratings yet
- Agency Enrollment FormDocument1 pageAgency Enrollment FormRaymond TenchavezNo ratings yet
- 321 23163 0 5962 9076501m2aDocument11 pages321 23163 0 5962 9076501m2aOshun76No ratings yet
- M500M Manual I56-3855Document2 pagesM500M Manual I56-3855Projects aissolNo ratings yet
- ML Ass 4Document7 pagesML Ass 4Santhosh Kumar PNo ratings yet
- Does 1+1 Always Equal 2Document1 pageDoes 1+1 Always Equal 2Minn Thiha ChitNo ratings yet
- ASME B31.3 - Interpretations No.31 - 2008 EditionDocument235 pagesASME B31.3 - Interpretations No.31 - 2008 Editionmohammad kassarNo ratings yet