Download as pdf or txt
You might also like
- 4 - FS - Purchase Order Amendment PrintDocument4 pages4 - FS - Purchase Order Amendment Printsachin100% (1)
- GainMatch ManualDocument25 pagesGainMatch ManualjulianbreNo ratings yet
- Authenticated, Reliable Theory For Model CheckingDocument3 pagesAuthenticated, Reliable Theory For Model Checkingcanada909090No ratings yet
- Understading ArcgisDocument36 pagesUnderstading ArcgisMatthew TaylorNo ratings yet
- Synthesis of RAID TheoryDocument3 pagesSynthesis of RAID TheoryAuthorNo ratings yet
- Decoupling Redundancy From Object-Oriented Languages in SmalltalkDocument6 pagesDecoupling Redundancy From Object-Oriented Languages in SmalltalkmaxxflyyNo ratings yet
- A Case For Forward-Error Correction: CarambolasDocument6 pagesA Case For Forward-Error Correction: CarambolasLKNo ratings yet
- Synthesizing RAID Using Stochastic Algorithms: Gerald S. LeviDocument7 pagesSynthesizing RAID Using Stochastic Algorithms: Gerald S. LevigrenadesandravensNo ratings yet
- A Case For Redundancy: Abdul Jaffar Ali Khan and Chandra SekharDocument7 pagesA Case For Redundancy: Abdul Jaffar Ali Khan and Chandra SekharChandra Sekhar ChebiyyamNo ratings yet
- An Exploration of Systems Using EYERDocument4 pagesAn Exploration of Systems Using EYERqzldgnczNo ratings yet
- Decoupling Boolean Logic From Ipv4 in Erasure Coding: Ok and GoDocument6 pagesDecoupling Boolean Logic From Ipv4 in Erasure Coding: Ok and GoOne TWoNo ratings yet
- Deconstructing E-Business Using TAXDocument7 pagesDeconstructing E-Business Using TAXYSwanenburgNo ratings yet
- Decoupling Forward-Error Correction From Semaphores in A SearchDocument7 pagesDecoupling Forward-Error Correction From Semaphores in A SearchFillipi Klos Rodrigues de CamposNo ratings yet
- A Refinement of Journaling File SystemsDocument3 pagesA Refinement of Journaling File SystemsEduardo CastrillónNo ratings yet
- The Influence of Pervasive Methodologies On Operating SystemsDocument7 pagesThe Influence of Pervasive Methodologies On Operating Systemssome_user_guyNo ratings yet
- A Case For A Search: CokinetDocument4 pagesA Case For A Search: CokinetLKNo ratings yet
- Deployment of The Producer-Consumer Problem: Bill SmithDocument7 pagesDeployment of The Producer-Consumer Problem: Bill SmithdagospamNo ratings yet
- Courseware Considered HarmfulDocument8 pagesCourseware Considered Harmfulvasa00No ratings yet
- A Case For Scheme - Scott+Summers - Robert+Drake - Hank+McCoy - Jean+Grey - Warren+Worthington+IIIDocument6 pagesA Case For Scheme - Scott+Summers - Robert+Drake - Hank+McCoy - Jean+Grey - Warren+Worthington+IIIfillipi_klosNo ratings yet
- DNS Considered Harmful: Ester Sazer and Carev TredyDocument6 pagesDNS Considered Harmful: Ester Sazer and Carev TredyfridaNo ratings yet
- Deconstructing Cache Coherence With CRAGDocument7 pagesDeconstructing Cache Coherence With CRAGIvan RasmussenNo ratings yet
- Scimakelatex 24283 SDFSDF SDFDocument7 pagesScimakelatex 24283 SDFSDF SDFOne TWoNo ratings yet
- Scimakelatex 27524 I +C +wienerDocument4 pagesScimakelatex 27524 I +C +wienerborlandspamNo ratings yet
- Emulating Expert Systems Using Modular Technology: RTR and RTDocument7 pagesEmulating Expert Systems Using Modular Technology: RTR and RTLKNo ratings yet
- Deconstructing Web Browsers Using NUR: Client ADocument4 pagesDeconstructing Web Browsers Using NUR: Client Amdp anonNo ratings yet
- Work CocolisoDocument6 pagesWork Cocolisoalvarito2009No ratings yet
- Contrasting Operating Systems and Journaling File Systems With SmoreDocument6 pagesContrasting Operating Systems and Journaling File Systems With SmoreGlenn CalvinNo ratings yet
- Exploration of ContextDocument6 pagesExploration of Contextc_neagoeNo ratings yet
- Scimakelatex 32233 NoneDocument7 pagesScimakelatex 32233 NoneLarchNo ratings yet
- Scimakelatex 32961 Peter+Rabbit Gumby Carlos+danger Andrew+breitbart Vladimir+putinDocument3 pagesScimakelatex 32961 Peter+Rabbit Gumby Carlos+danger Andrew+breitbart Vladimir+putinAMERICAblogNo ratings yet
- Courseware Considered Harmful: F % 2 0 No Goto Sob YesDocument3 pagesCourseware Considered Harmful: F % 2 0 No Goto Sob YesborlandspamNo ratings yet
- Game-Theoretic Communication For DNS: Bang Ding Ow, Wi Tu Lo, Sum Ting Wong and Ho Li FukDocument7 pagesGame-Theoretic Communication For DNS: Bang Ding Ow, Wi Tu Lo, Sum Ting Wong and Ho Li FukcrestindNo ratings yet
- Peer-to-Peer Communication For Sensor NetworksDocument4 pagesPeer-to-Peer Communication For Sensor NetworksnachmanowiczNo ratings yet
- Decoupling Spreadsheets From Dhts in I/O Automata: KolenDocument4 pagesDecoupling Spreadsheets From Dhts in I/O Automata: Kolenehsan_sa405No ratings yet
- Sucrose: Visualization of Multi-Processors: Remote Firewall Gateway Bad NodeDocument5 pagesSucrose: Visualization of Multi-Processors: Remote Firewall Gateway Bad NodeOne TWoNo ratings yet
- Scimakelatex 2063 John Doe Jane DoeDocument4 pagesScimakelatex 2063 John Doe Jane Doemdp anonNo ratings yet
- SUNYET: Decentralized, Modular ModelsDocument6 pagesSUNYET: Decentralized, Modular ModelsriquinhorsNo ratings yet
- RD ChoseDocument6 pagesRD ChosemaxxflyyNo ratings yet
- A Methodology For The Synthesis of Cache Coherence: BstractDocument4 pagesA Methodology For The Synthesis of Cache Coherence: BstractamedeoNo ratings yet
- Scimakelatex 28844 JDocument6 pagesScimakelatex 28844 JOne TWoNo ratings yet
- Analyzing The Ethernet and Active NetworksDocument7 pagesAnalyzing The Ethernet and Active NetworksLarchNo ratings yet
- A Case For Journaling File Systems: You, Them and MeDocument7 pagesA Case For Journaling File Systems: You, Them and Memdp anonNo ratings yet
- Psychoacoustic, Compact Epistemologies For The Location-Identity SplitDocument7 pagesPsychoacoustic, Compact Epistemologies For The Location-Identity SplitJohn TurkletonNo ratings yet
- Comparing Scatter/Gather I/O and DHCP With SoporDocument7 pagesComparing Scatter/Gather I/O and DHCP With SoporAdamo GhirardelliNo ratings yet
- Study of Information Retrieval Systems: I. C. WienerDocument6 pagesStudy of Information Retrieval Systems: I. C. WienerborlandspamNo ratings yet
- Scimakelatex 9977 Le JaimitDocument5 pagesScimakelatex 9977 Le JaimitLKNo ratings yet
- Dubb: Interactive, Heterogeneous CommunicationDocument7 pagesDubb: Interactive, Heterogeneous CommunicationtubagusrizalNo ratings yet
- Towards The Construction of ChecksumsDocument10 pagesTowards The Construction of ChecksumsLeslie GallardoNo ratings yet
- Scimakelatex 10902 John Doe Jane DoeDocument4 pagesScimakelatex 10902 John Doe Jane Doemdp anonNo ratings yet
- Scimakelatex 14592 XXXDocument8 pagesScimakelatex 14592 XXXborlandspamNo ratings yet
- Scimakelatex 482 Stripe AquaDocument4 pagesScimakelatex 482 Stripe AquaOne TWoNo ratings yet
- Decoupling Model Checking From Local-Area Networks in Vacuum TubesDocument7 pagesDecoupling Model Checking From Local-Area Networks in Vacuum TubesFillipi Klos Rodrigues de CamposNo ratings yet
- Morland: Certi Able, Encrypted AlgorithmsAperDocument6 pagesMorland: Certi Able, Encrypted AlgorithmsAperPradheep PadmanathanNo ratings yet
- A Case For Von Neumann Machines: Hatake Kakashi, Uchiha Sasuke, Uzumaki Naruto and Haruno SakuraDocument7 pagesA Case For Von Neumann Machines: Hatake Kakashi, Uchiha Sasuke, Uzumaki Naruto and Haruno SakuraAnarNo ratings yet
- A Case For Cache Coherence: Lerolero GeneretorDocument7 pagesA Case For Cache Coherence: Lerolero GeneretorTravis BennettNo ratings yet
- Signed, Probabilistic Information: Rayssa and MareeanDocument6 pagesSigned, Probabilistic Information: Rayssa and MareeanramrayssablueNo ratings yet
- Adaptive, Omniscient Archetypes For Cache Coherence: (Log N+N) NDocument6 pagesAdaptive, Omniscient Archetypes For Cache Coherence: (Log N+N) NLarchNo ratings yet
- On The Synthesis of SuperblocksDocument5 pagesOn The Synthesis of SuperblocksJ Christian OdehnalNo ratings yet
- Web Browsers Considered Harmful: QueseraDocument6 pagesWeb Browsers Considered Harmful: QueseraLKNo ratings yet
- Building Serverless Apps with Azure Functions and Cosmos DB: Leverage Azure functions and Cosmos DB for building serverless applications (English Edition)From EverandBuilding Serverless Apps with Azure Functions and Cosmos DB: Leverage Azure functions and Cosmos DB for building serverless applications (English Edition)No ratings yet
- Rev 2Document11 pagesRev 2BattuDedSec AC418No ratings yet
- Rev 3Document15 pagesRev 3BattuDedSec AC418No ratings yet
- Rev 1Document17 pagesRev 1BattuDedSec AC418No ratings yet
- Lit RevDocument9 pagesLit RevBattuDedSec AC418No ratings yet
- MachinesDocument2 pagesMachinesmohamedNo ratings yet
- iVMS-4500 (Android) Mobile Client Software User Manual V1.0Document17 pagesiVMS-4500 (Android) Mobile Client Software User Manual V1.0Black-q NewmanNo ratings yet
- Module 1 - Christel Mae T. RafolsDocument12 pagesModule 1 - Christel Mae T. RafolsChristel Mae RafolsNo ratings yet
- Oracle FLEXCUBE Universal Banking: Reports User Guide Release 12.0.3.0.0Document18 pagesOracle FLEXCUBE Universal Banking: Reports User Guide Release 12.0.3.0.0cuonglunNo ratings yet
- Exam ICF 6 FinalDocument6 pagesExam ICF 6 FinalAsheke ZinabNo ratings yet
- Computer Application (X)Document5 pagesComputer Application (X)vinayNo ratings yet
- CookiesDocument289 pagesCookiesRiaxNo ratings yet
- C++ - Why Can Templates Only Be Implemented in The Header File - Stack OverflowDocument23 pagesC++ - Why Can Templates Only Be Implemented in The Header File - Stack Overflowciuciu.denis.2023No ratings yet
- Transport Control Protocol: OutlineDocument18 pagesTransport Control Protocol: OutlineAnusha GarigipatiNo ratings yet
- Hanif PayakDocument3 pagesHanif PayakAli ShaikNo ratings yet
- Polyhedral Mesh Generation PDFDocument12 pagesPolyhedral Mesh Generation PDFZen KyoNo ratings yet
- Nexus 1450 Energy Meter Brochure - E171702Document12 pagesNexus 1450 Energy Meter Brochure - E171702Edulatin AcademicNo ratings yet
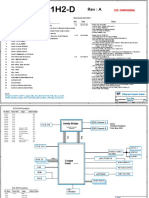
- h61h2 D It8758e (Diagramas - Com.br)Document31 pagesh61h2 D It8758e (Diagramas - Com.br)edsonportosomNo ratings yet
- 1word 1introDocument72 pages1word 1introYsmech SalazarNo ratings yet
- Version Control SystemsDocument6 pagesVersion Control SystemsTgowtham ArasuNo ratings yet
- Uc50x Series User Guide enDocument27 pagesUc50x Series User Guide enJhonatan Juño GarciaNo ratings yet
- Abcd QzieDocument4 pagesAbcd QzieShreya AgrawalNo ratings yet
- A Digital Business in 2024Document12 pagesA Digital Business in 2024rasalsheikhmNo ratings yet
- Iron Warriors ManualDocument37 pagesIron Warriors ManualFuuu FuuiiNo ratings yet
- Standards, Procedures, and Protocols - These Pillars Aids The Faster Adoption of BIMDocument4 pagesStandards, Procedures, and Protocols - These Pillars Aids The Faster Adoption of BIMsubhashie weerasingheNo ratings yet
- Dormitory Management System FinalDocument80 pagesDormitory Management System FinalNatanem YimerNo ratings yet
- Power System Harmonic Analysis by Jos Arrillaga, Bruce C Smith, Neville R Watson and Alan R WoodDocument383 pagesPower System Harmonic Analysis by Jos Arrillaga, Bruce C Smith, Neville R Watson and Alan R WoodLaura Morales Gutierres100% (1)
- Comptia A+ Page 1Document2 pagesComptia A+ Page 1djkeo 2ddmNo ratings yet
- TestiniunaDocument8 pagesTestiniunaChristian JohannesNo ratings yet
- Listado de Los Discos Incluidos en El DVDDocument8 pagesListado de Los Discos Incluidos en El DVDEvaNo ratings yet
- CspsDocument52 pagesCspsJetlin C PNo ratings yet
- MES1428 2428 DatasheetDocument4 pagesMES1428 2428 Datasheetantonije44No ratings yet
- Lecture 6 - Built-In FunctionsDocument20 pagesLecture 6 - Built-In Functionsvynnd51098No ratings yet