
Tracking With The Kinematics of Extremal Contours: 1 Introduction and Background
Tracking With The Kinematics of Extremal Contours: 1 Introduction and Background
You might also like
- GE Digital TwinDocument30 pagesGE Digital TwinWaleed Ahmed Vohra100% (2)
- Optical Fiber Technology in Automotive IndustryDocument42 pagesOptical Fiber Technology in Automotive IndustryMetalHead1150% (2)
- Steel Bearing PlatesDocument4 pagesSteel Bearing Platessebastian9033No ratings yet
- Odetic PSIPDocument3 pagesOdetic PSIPdufrenoisNo ratings yet
- Euclidean Position Estimation of Features On An Object Using A Single Camera: A Lyapunov-Based ApproachDocument19 pagesEuclidean Position Estimation of Features On An Object Using A Single Camera: A Lyapunov-Based ApproachShivashankar HiremathNo ratings yet
- 3차원 흐름 (원문)Document8 pages3차원 흐름 (원문)Yura JoNo ratings yet
- ITS Master 15963 Paper PDFDocument6 pagesITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedNo ratings yet
- Estimation of Surface Normal of A Curved Surface Using TextureDocument10 pagesEstimation of Surface Normal of A Curved Surface Using Texture20282930No ratings yet
- Full Text 01Document7 pagesFull Text 01Voskula ShivakrishnaNo ratings yet
- Time To Contact Relative To A Planar Surface: Berthold K.P. Horn Yajun Fang Ichiro MasakiDocument7 pagesTime To Contact Relative To A Planar Surface: Berthold K.P. Horn Yajun Fang Ichiro MasakibenjillNo ratings yet
- Determining Optical Flow Horn SchunckDocument19 pagesDetermining Optical Flow Horn SchunckTomáš HodaňNo ratings yet
- Using Vanishing Points For Camera CalibrationDocument13 pagesUsing Vanishing Points For Camera CalibrationYoungKimNo ratings yet
- Methodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemDocument6 pagesMethodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemmaxamaxaNo ratings yet
- Math of PhotogrammetryDocument16 pagesMath of PhotogrammetryKen LimNo ratings yet
- A Variational Approach To Joint Denoising, Edge Detection and Motion EstimationDocument10 pagesA Variational Approach To Joint Denoising, Edge Detection and Motion EstimationaaNo ratings yet
- Multi-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniDocument6 pagesMulti-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniQuách Thế XuânNo ratings yet
- Control Design For A Biped: Reference Trajectory Based On Driven Angles As Functions of The Undriven AngleDocument43 pagesControl Design For A Biped: Reference Trajectory Based On Driven Angles As Functions of The Undriven AngleJoshua Nessus Aragonès SalazarNo ratings yet
- Potential Field Methods and Their Inherent Limitations For Mobile Robot NavigationDocument10 pagesPotential Field Methods and Their Inherent Limitations For Mobile Robot NavigationViet Nguyen TrungNo ratings yet
- Global Interpretation Optical Flow Field: A Least-Squares ApproachDocument4 pagesGlobal Interpretation Optical Flow Field: A Least-Squares ApproachsumasuthanNo ratings yet
- Robotica (2006)Document6 pagesRobotica (2006)Sachin ShendeNo ratings yet
- Segmentation of Motion Textures Using Mixed-State Markov Random FieldsDocument12 pagesSegmentation of Motion Textures Using Mixed-State Markov Random Fieldsnashter81No ratings yet
- 3D Linear Inverted Pendulum ModelDocument8 pages3D Linear Inverted Pendulum Modelprawin23No ratings yet
- Vanishing Point Detection in The Hough Transform SpaceDocument8 pagesVanishing Point Detection in The Hough Transform Spacepepethefrogg45No ratings yet
- Short Papers: The Tricept Robot: Dynamics and Impedance ControlDocument6 pagesShort Papers: The Tricept Robot: Dynamics and Impedance ControlPrakashNo ratings yet
- Attitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresDocument7 pagesAttitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresJoseph WoodruffNo ratings yet
- Iran I 93 MotionDocument24 pagesIran I 93 MotionAlejandro PerezNo ratings yet
- GPU-Based Nonlinear Ray Tracing: EUROGRAPHICS 2004 / M.-P. Cani and M. Slater (Guest Editors)Document9 pagesGPU-Based Nonlinear Ray Tracing: EUROGRAPHICS 2004 / M.-P. Cani and M. Slater (Guest Editors)Qi MoNo ratings yet
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- 10 TAIMA 2015 InesDocument6 pages10 TAIMA 2015 InesSlim MhiriNo ratings yet
- Active Intrinsic Calibration Using Vanishing PointsDocument6 pagesActive Intrinsic Calibration Using Vanishing PointsRajul RahmadNo ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Rescue AsdDocument8 pagesRescue Asdkoti_naidu69No ratings yet
- ActingDocument1 pageActingFadhil SahibNo ratings yet
- Oriented Projective Geometry For Computer VisionDocument10 pagesOriented Projective Geometry For Computer VisionjivasumanaNo ratings yet
- A Predictive Contour Inertia Snake Model For General Video TrackingDocument4 pagesA Predictive Contour Inertia Snake Model For General Video TrackingFilip AndreiNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNo ratings yet
- Lecture 18: Kinematics and Animation: Animation of 3D ModelsDocument4 pagesLecture 18: Kinematics and Animation: Animation of 3D ModelsSheebaPriscillaNo ratings yet
- A Wavelet Based Alternative Iteration Method For The Orientation Refinement of Cryo-Electron Microscopy 3D ReconstructionDocument14 pagesA Wavelet Based Alternative Iteration Method For The Orientation Refinement of Cryo-Electron Microscopy 3D ReconstructionFadilah IlahiNo ratings yet
- Matching Gradient Descriptors With Topological Constraints To Characterise The Crowd DynamicsDocument6 pagesMatching Gradient Descriptors With Topological Constraints To Characterise The Crowd DynamicsKhairulNo ratings yet
- Single Camera 3D-Particle Tracking VelocimetryDocument6 pagesSingle Camera 3D-Particle Tracking VelocimetryArcangel Dragon SerpienteNo ratings yet
- A Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuDocument5 pagesA Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuSathya PrakashNo ratings yet
- A Fast and Adaptive Method For Image Contrast Enhancement: Computer ScicnccsDocument4 pagesA Fast and Adaptive Method For Image Contrast Enhancement: Computer ScicnccsjimakosjpNo ratings yet
- Iaetsd An Enhanced Circular Detection Technique - RPSW Using Circular Hough TransformDocument4 pagesIaetsd An Enhanced Circular Detection Technique - RPSW Using Circular Hough TransformiaetsdiaetsdNo ratings yet
- Inverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresDocument30 pagesInverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresbobohelpNo ratings yet
- Haptic Rendering and Psychophysical Evaluation of A Virtual Three-Dimensional Helical SpringDocument22 pagesHaptic Rendering and Psychophysical Evaluation of A Virtual Three-Dimensional Helical SpringSanjay KumarNo ratings yet
- 0471371459Document58 pages0471371459aldanajNo ratings yet
- Automated Architecture Reconstruction From Close-Range PhotogrammetryDocument8 pagesAutomated Architecture Reconstruction From Close-Range PhotogrammetrySentinel BergNo ratings yet
- ISSFD24 Paper S10-3 BradleyDocument20 pagesISSFD24 Paper S10-3 BradleyfasNo ratings yet
- Content-Based Image Retrieval Using Gabor Texture Features: Dengsheng Zhang, Aylwin Wong, Maria Indrawan, Guojun LuDocument4 pagesContent-Based Image Retrieval Using Gabor Texture Features: Dengsheng Zhang, Aylwin Wong, Maria Indrawan, Guojun LuAshwini NayakNo ratings yet
- Implicit Meshes For Effective Silhouette Handling: KeywordsDocument25 pagesImplicit Meshes For Effective Silhouette Handling: KeywordsmathwrathNo ratings yet
- Exploring The Radon and Trace TransformsDocument8 pagesExploring The Radon and Trace TransformsIgor GartziaNo ratings yet
- Eru 2010 SLAM PaperDocument3 pagesEru 2010 SLAM PaperHasala DharmawardenaNo ratings yet
- Phase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIDocument8 pagesPhase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIJeremias TabordaNo ratings yet
- RoboticsDocument10 pagesRoboticsjaiy12No ratings yet
- Curvelet Fusion of MR and CT Images: Progress in Electromagnetics Research C, Vol. 3, 215-224, 2008Document10 pagesCurvelet Fusion of MR and CT Images: Progress in Electromagnetics Research C, Vol. 3, 215-224, 2008sgajendranNo ratings yet
- Linear Non Linear FEMDocument24 pagesLinear Non Linear FEMwial8295No ratings yet
- Asift AsiftDocument11 pagesAsift AsiftHaris MasoodNo ratings yet
- Guidance and Control of AuvDocument10 pagesGuidance and Control of AuvJonnada KumarNo ratings yet
- Motion Detection With An Unstable Camera: Pierre-Marc Jodoin Janusz Konrad Venkatesh Saligrama Vincent Veilleux-GabouryDocument4 pagesMotion Detection With An Unstable Camera: Pierre-Marc Jodoin Janusz Konrad Venkatesh Saligrama Vincent Veilleux-Gabourycacr_72No ratings yet
- Model Analysis of Tapered Beam VibrationDocument36 pagesModel Analysis of Tapered Beam VibrationVineel Kumar BapatlaNo ratings yet
- A System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteDocument7 pagesA System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteCyrille LamasséNo ratings yet
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsDocument6 pagesDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Metropolis Light Transport: Eric Veach Leonidas J. GuibasDocument12 pagesMetropolis Light Transport: Eric Veach Leonidas J. GuibasCyrille LamasséNo ratings yet
- Analysis of Planar Light Fields From Homogeneous Convex Curved Surfaces Under Distant IlluminationDocument14 pagesAnalysis of Planar Light Fields From Homogeneous Convex Curved Surfaces Under Distant IlluminationCyrille LamasséNo ratings yet
- From Image-Based Motion Analysis To Free-Viewpoint Video: Christian TheobaltDocument235 pagesFrom Image-Based Motion Analysis To Free-Viewpoint Video: Christian TheobaltCyrille LamasséNo ratings yet
- On The Relationship Between Radiance and Irradiance: Determining The Illumination From Images of A Convex Lambertian ObjectDocument12 pagesOn The Relationship Between Radiance and Irradiance: Determining The Illumination From Images of A Convex Lambertian ObjectCyrille LamasséNo ratings yet
- Accurate Face Models From Uncalibrated and Ill-Lit Video SequencesDocument9 pagesAccurate Face Models From Uncalibrated and Ill-Lit Video SequencesCyrille LamasséNo ratings yet
- Comparing Efficiency of Integration Methods For Cloth SimulationDocument8 pagesComparing Efficiency of Integration Methods For Cloth SimulationCyrille LamasséNo ratings yet
- Virtual Fashion Show Using Real-Time Markerless Motion CaptureDocument10 pagesVirtual Fashion Show Using Real-Time Markerless Motion CaptureCyrille LamasséNo ratings yet
- Morphological Modeling and Deformation of 3D Objects: by Samuel Boivin, André Gagalowicz and Youichi HorryDocument25 pagesMorphological Modeling and Deformation of 3D Objects: by Samuel Boivin, André Gagalowicz and Youichi HorryCyrille LamasséNo ratings yet
- View-Based Location and Tracking of Body Parts For Visual InteractionDocument10 pagesView-Based Location and Tracking of Body Parts For Visual InteractionCyrille LamasséNo ratings yet
- Articulated Body Motion Capture by Stochastic SearchDocument21 pagesArticulated Body Motion Capture by Stochastic SearchCyrille LamasséNo ratings yet
- A System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteDocument7 pagesA System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteCyrille LamasséNo ratings yet
- Markerless Human Motion Capture Through Visual Hull and Articulated ICPDocument5 pagesMarkerless Human Motion Capture Through Visual Hull and Articulated ICPCyrille LamasséNo ratings yet
- Experiments in Immersive Virtual Realityfor Scientific VisualizationDocument21 pagesExperiments in Immersive Virtual Realityfor Scientific VisualizationCyrille LamasséNo ratings yet
- On Computing Exact Visual Hulls of Solids Bounded by Smooth SurfacesDocument6 pagesOn Computing Exact Visual Hulls of Solids Bounded by Smooth SurfacesCyrille LamasséNo ratings yet
- View Synthesis Using Convex and Visual HullsDocument10 pagesView Synthesis Using Convex and Visual HullsCyrille LamasséNo ratings yet
- Approach of Heterogeneous Bio-Modeling Based On Material FeaturesDocument12 pagesApproach of Heterogeneous Bio-Modeling Based On Material FeaturesCyrille LamasséNo ratings yet
- A Novel Interaction Metaphor For Personal Environment Control: Direct Manipulation of Physical Environment Based On 3D VisualizationDocument9 pagesA Novel Interaction Metaphor For Personal Environment Control: Direct Manipulation of Physical Environment Based On 3D VisualizationCyrille LamasséNo ratings yet
- Marker-Free Model Reconstruction and Motion Tracking From 3D Voxel DataDocument10 pagesMarker-Free Model Reconstruction and Motion Tracking From 3D Voxel DataCyrille LamasséNo ratings yet
- Handling Sectional Views in Volume-Based Approach To Automatically Construct 3D Solid From 2D ViewsDocument11 pagesHandling Sectional Views in Volume-Based Approach To Automatically Construct 3D Solid From 2D ViewsCyrille LamasséNo ratings yet
- Deformable Simulation Using Force Propagation Model With Finite Element OptimizationDocument10 pagesDeformable Simulation Using Force Propagation Model With Finite Element OptimizationCyrille LamasséNo ratings yet
- Markerless Motion Capture of Complex Human Movements From Multiple ViewsDocument148 pagesMarkerless Motion Capture of Complex Human Movements From Multiple ViewsCyrille LamasséNo ratings yet
- Augmented Reeb Graphs For Content-Based Retrieval of 3D Mesh ModelsDocument10 pagesAugmented Reeb Graphs For Content-Based Retrieval of 3D Mesh ModelsCyrille LamasséNo ratings yet
- Human Body Modeling From Video Sequences: Left Center RightDocument8 pagesHuman Body Modeling From Video Sequences: Left Center RightCyrille LamasséNo ratings yet
- Cartoon Textures: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Document10 pagesCartoon Textures: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Cyrille LamasséNo ratings yet
- 3D Articulated Models and Multi-View Tracking With SilhouettesDocument6 pages3D Articulated Models and Multi-View Tracking With SilhouettesCyrille LamasséNo ratings yet
- Progressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingDocument12 pagesProgressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingCyrille LamasséNo ratings yet
- Implementing Fast Cloth Simulation With Collision ResponseDocument10 pagesImplementing Fast Cloth Simulation With Collision ResponseCyrille LamasséNo ratings yet
- UntitledDocument73 pagesUntitledCyrille LamasséNo ratings yet
- Markerless Motion Capture: Paris Kaimakis August 31, 2004Document66 pagesMarkerless Motion Capture: Paris Kaimakis August 31, 2004Cyrille LamasséNo ratings yet
- Decomposing Cloth: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Document9 pagesDecomposing Cloth: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Cyrille LamasséNo ratings yet
- Comparison of Thermocouples, RTDS, and ThermistorsDocument2 pagesComparison of Thermocouples, RTDS, and ThermistorsAlwyzz Happie RaamzzNo ratings yet
- Centrifugal Pump - What Is The Purpose of Minimum FlowDocument3 pagesCentrifugal Pump - What Is The Purpose of Minimum Flowjesus_manrique2753No ratings yet
- Turbo Supervisory Instruments: Presenter: Chona (C & I)Document25 pagesTurbo Supervisory Instruments: Presenter: Chona (C & I)Morassa Chona100% (1)
- SyaminDocument1 pageSyaminNazrin ManshorNo ratings yet
- ASTM Standard (Vol 1.04) A 131 - A131M - 94Document5 pagesASTM Standard (Vol 1.04) A 131 - A131M - 94astrogildoNo ratings yet
- Finite Element Analysis of Bamboo PDFDocument12 pagesFinite Element Analysis of Bamboo PDFPatrick Ehi ImoisiliNo ratings yet
- Crane Wire RopeDocument32 pagesCrane Wire RopeRajmohan Babu100% (3)
- The Particle Nature of MatterDocument25 pagesThe Particle Nature of MatterMaria bonny aquinoNo ratings yet
- The Use of Pyrosim Graphical User Interface For Fds Simulation of A Cinema FireDocument9 pagesThe Use of Pyrosim Graphical User Interface For Fds Simulation of A Cinema Firebuha_buhaNo ratings yet
- AmreadDocument330 pagesAmreadThangarajNo ratings yet
- 11-SuperCritical Fluid ChromatographyDocument6 pages11-SuperCritical Fluid ChromatographyGopiNo ratings yet
- Steam O&MDocument28 pagesSteam O&MmadiNo ratings yet
- Control ValveDocument39 pagesControl ValvewirawansatriaNo ratings yet
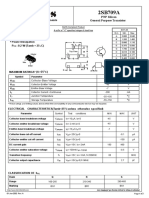
- Transistor PNP 2SB709 TV SonyDocument3 pagesTransistor PNP 2SB709 TV SonyJose PerezNo ratings yet
- Center of Gravity Vs Center of MassDocument25 pagesCenter of Gravity Vs Center of Massguptafamily1992No ratings yet
- Accelerated Cable Life TestingDocument37 pagesAccelerated Cable Life TestingAli NaderianNo ratings yet
- (Aalto University) Lecture 6 - Stress Intensity FactorDocument21 pages(Aalto University) Lecture 6 - Stress Intensity FactorShazwanShahNo ratings yet
- Practical Mind ReadingDocument106 pagesPractical Mind Readingaruen7980% (5)
- Gen MathDocument19 pagesGen MathMiraflorNo ratings yet
- Measurement: Conversion of Units of MeasurementDocument28 pagesMeasurement: Conversion of Units of MeasurementRichel Borres MangmangNo ratings yet
- STS Lesson 2Document30 pagesSTS Lesson 2Reymond Lupoz IINo ratings yet
- 2020 Pavement Design ManualDocument660 pages2020 Pavement Design ManualBitbitter100% (1)
- Mathematics 1a 1Document2 pagesMathematics 1a 1Rajesh PinjarlaNo ratings yet
- Electrical Energy and Current: Additional Practice CDocument2 pagesElectrical Energy and Current: Additional Practice CMona Mohamed SafwatNo ratings yet
- Advances in Mass Spectrometry For LipidomicsDocument35 pagesAdvances in Mass Spectrometry For LipidomicsAna Paula PetiNo ratings yet
- Types of ParagraphDocument7 pagesTypes of ParagraphSantiago Jr KadusaleNo ratings yet




















































































































Download as pdf or txt
You might also like
- GE Digital TwinDocument30 pagesGE Digital TwinWaleed Ahmed Vohra100% (2)
- Optical Fiber Technology in Automotive IndustryDocument42 pagesOptical Fiber Technology in Automotive IndustryMetalHead1150% (2)
- Steel Bearing PlatesDocument4 pagesSteel Bearing Platessebastian9033No ratings yet
- Odetic PSIPDocument3 pagesOdetic PSIPdufrenoisNo ratings yet
- Euclidean Position Estimation of Features On An Object Using A Single Camera: A Lyapunov-Based ApproachDocument19 pagesEuclidean Position Estimation of Features On An Object Using A Single Camera: A Lyapunov-Based ApproachShivashankar HiremathNo ratings yet
- 3차원 흐름 (원문)Document8 pages3차원 흐름 (원문)Yura JoNo ratings yet
- ITS Master 15963 Paper PDFDocument6 pagesITS Master 15963 Paper PDFAbdelrahim Hussam MoubayedNo ratings yet
- Estimation of Surface Normal of A Curved Surface Using TextureDocument10 pagesEstimation of Surface Normal of A Curved Surface Using Texture20282930No ratings yet
- Full Text 01Document7 pagesFull Text 01Voskula ShivakrishnaNo ratings yet
- Time To Contact Relative To A Planar Surface: Berthold K.P. Horn Yajun Fang Ichiro MasakiDocument7 pagesTime To Contact Relative To A Planar Surface: Berthold K.P. Horn Yajun Fang Ichiro MasakibenjillNo ratings yet
- Determining Optical Flow Horn SchunckDocument19 pagesDetermining Optical Flow Horn SchunckTomáš HodaňNo ratings yet
- Using Vanishing Points For Camera CalibrationDocument13 pagesUsing Vanishing Points For Camera CalibrationYoungKimNo ratings yet
- Methodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemDocument6 pagesMethodology For Kinematics Modeling of Articulated Rovers, Enhanced With Fuzzy Logic SystemmaxamaxaNo ratings yet
- Math of PhotogrammetryDocument16 pagesMath of PhotogrammetryKen LimNo ratings yet
- A Variational Approach To Joint Denoising, Edge Detection and Motion EstimationDocument10 pagesA Variational Approach To Joint Denoising, Edge Detection and Motion EstimationaaNo ratings yet
- Multi-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniDocument6 pagesMulti-Frame Alignment of Planes: Lihi Zelnik-Manor Michal IraniQuách Thế XuânNo ratings yet
- Control Design For A Biped: Reference Trajectory Based On Driven Angles As Functions of The Undriven AngleDocument43 pagesControl Design For A Biped: Reference Trajectory Based On Driven Angles As Functions of The Undriven AngleJoshua Nessus Aragonès SalazarNo ratings yet
- Potential Field Methods and Their Inherent Limitations For Mobile Robot NavigationDocument10 pagesPotential Field Methods and Their Inherent Limitations For Mobile Robot NavigationViet Nguyen TrungNo ratings yet
- Global Interpretation Optical Flow Field: A Least-Squares ApproachDocument4 pagesGlobal Interpretation Optical Flow Field: A Least-Squares ApproachsumasuthanNo ratings yet
- Robotica (2006)Document6 pagesRobotica (2006)Sachin ShendeNo ratings yet
- Segmentation of Motion Textures Using Mixed-State Markov Random FieldsDocument12 pagesSegmentation of Motion Textures Using Mixed-State Markov Random Fieldsnashter81No ratings yet
- 3D Linear Inverted Pendulum ModelDocument8 pages3D Linear Inverted Pendulum Modelprawin23No ratings yet
- Vanishing Point Detection in The Hough Transform SpaceDocument8 pagesVanishing Point Detection in The Hough Transform Spacepepethefrogg45No ratings yet
- Short Papers: The Tricept Robot: Dynamics and Impedance ControlDocument6 pagesShort Papers: The Tricept Robot: Dynamics and Impedance ControlPrakashNo ratings yet
- Attitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresDocument7 pagesAttitude and Gyro Bias Estimation For A Flying UAV: Najib Metni Jean-Michel P Imlin Tarek Hamel Philippe Sou'eresJoseph WoodruffNo ratings yet
- Iran I 93 MotionDocument24 pagesIran I 93 MotionAlejandro PerezNo ratings yet
- GPU-Based Nonlinear Ray Tracing: EUROGRAPHICS 2004 / M.-P. Cani and M. Slater (Guest Editors)Document9 pagesGPU-Based Nonlinear Ray Tracing: EUROGRAPHICS 2004 / M.-P. Cani and M. Slater (Guest Editors)Qi MoNo ratings yet
- Study of Rotor-Bearing Systems Using Campbell DiagramDocument4 pagesStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggNo ratings yet
- 10 TAIMA 2015 InesDocument6 pages10 TAIMA 2015 InesSlim MhiriNo ratings yet
- Active Intrinsic Calibration Using Vanishing PointsDocument6 pagesActive Intrinsic Calibration Using Vanishing PointsRajul RahmadNo ratings yet
- Genetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationDocument23 pagesGenetic and ICP Laser Point Matching For 2D Mobile Robot Motion EstimationhenrydclNo ratings yet
- Rescue AsdDocument8 pagesRescue Asdkoti_naidu69No ratings yet
- ActingDocument1 pageActingFadhil SahibNo ratings yet
- Oriented Projective Geometry For Computer VisionDocument10 pagesOriented Projective Geometry For Computer VisionjivasumanaNo ratings yet
- A Predictive Contour Inertia Snake Model For General Video TrackingDocument4 pagesA Predictive Contour Inertia Snake Model For General Video TrackingFilip AndreiNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNo ratings yet
- Lecture 18: Kinematics and Animation: Animation of 3D ModelsDocument4 pagesLecture 18: Kinematics and Animation: Animation of 3D ModelsSheebaPriscillaNo ratings yet
- A Wavelet Based Alternative Iteration Method For The Orientation Refinement of Cryo-Electron Microscopy 3D ReconstructionDocument14 pagesA Wavelet Based Alternative Iteration Method For The Orientation Refinement of Cryo-Electron Microscopy 3D ReconstructionFadilah IlahiNo ratings yet
- Matching Gradient Descriptors With Topological Constraints To Characterise The Crowd DynamicsDocument6 pagesMatching Gradient Descriptors With Topological Constraints To Characterise The Crowd DynamicsKhairulNo ratings yet
- Single Camera 3D-Particle Tracking VelocimetryDocument6 pagesSingle Camera 3D-Particle Tracking VelocimetryArcangel Dragon SerpienteNo ratings yet
- A Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuDocument5 pagesA Novel Image Fusion Algorithm Using Frit and Pca: MIAO Qiguang WANG BaoshuSathya PrakashNo ratings yet
- A Fast and Adaptive Method For Image Contrast Enhancement: Computer ScicnccsDocument4 pagesA Fast and Adaptive Method For Image Contrast Enhancement: Computer ScicnccsjimakosjpNo ratings yet
- Iaetsd An Enhanced Circular Detection Technique - RPSW Using Circular Hough TransformDocument4 pagesIaetsd An Enhanced Circular Detection Technique - RPSW Using Circular Hough TransformiaetsdiaetsdNo ratings yet
- Inverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresDocument30 pagesInverse Kinematics Positioning Using Nonlinear Programming For Highly Articulated FiguresbobohelpNo ratings yet
- Haptic Rendering and Psychophysical Evaluation of A Virtual Three-Dimensional Helical SpringDocument22 pagesHaptic Rendering and Psychophysical Evaluation of A Virtual Three-Dimensional Helical SpringSanjay KumarNo ratings yet
- 0471371459Document58 pages0471371459aldanajNo ratings yet
- Automated Architecture Reconstruction From Close-Range PhotogrammetryDocument8 pagesAutomated Architecture Reconstruction From Close-Range PhotogrammetrySentinel BergNo ratings yet
- ISSFD24 Paper S10-3 BradleyDocument20 pagesISSFD24 Paper S10-3 BradleyfasNo ratings yet
- Content-Based Image Retrieval Using Gabor Texture Features: Dengsheng Zhang, Aylwin Wong, Maria Indrawan, Guojun LuDocument4 pagesContent-Based Image Retrieval Using Gabor Texture Features: Dengsheng Zhang, Aylwin Wong, Maria Indrawan, Guojun LuAshwini NayakNo ratings yet
- Implicit Meshes For Effective Silhouette Handling: KeywordsDocument25 pagesImplicit Meshes For Effective Silhouette Handling: KeywordsmathwrathNo ratings yet
- Exploring The Radon and Trace TransformsDocument8 pagesExploring The Radon and Trace TransformsIgor GartziaNo ratings yet
- Eru 2010 SLAM PaperDocument3 pagesEru 2010 SLAM PaperHasala DharmawardenaNo ratings yet
- Phase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIDocument8 pagesPhase-Driven Finite Element Model For Spatio-Temporal Tracking in Tagged Cardiac MRIJeremias TabordaNo ratings yet
- RoboticsDocument10 pagesRoboticsjaiy12No ratings yet
- Curvelet Fusion of MR and CT Images: Progress in Electromagnetics Research C, Vol. 3, 215-224, 2008Document10 pagesCurvelet Fusion of MR and CT Images: Progress in Electromagnetics Research C, Vol. 3, 215-224, 2008sgajendranNo ratings yet
- Linear Non Linear FEMDocument24 pagesLinear Non Linear FEMwial8295No ratings yet
- Asift AsiftDocument11 pagesAsift AsiftHaris MasoodNo ratings yet
- Guidance and Control of AuvDocument10 pagesGuidance and Control of AuvJonnada KumarNo ratings yet
- Motion Detection With An Unstable Camera: Pierre-Marc Jodoin Janusz Konrad Venkatesh Saligrama Vincent Veilleux-GabouryDocument4 pagesMotion Detection With An Unstable Camera: Pierre-Marc Jodoin Janusz Konrad Venkatesh Saligrama Vincent Veilleux-Gabourycacr_72No ratings yet
- Model Analysis of Tapered Beam VibrationDocument36 pagesModel Analysis of Tapered Beam VibrationVineel Kumar BapatlaNo ratings yet
- A System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteDocument7 pagesA System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteCyrille LamasséNo ratings yet
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsDocument6 pagesDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiNo ratings yet
- Motion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledFrom EverandMotion Field: Exploring the Dynamics of Computer Vision: Motion Field UnveiledNo ratings yet
- Metropolis Light Transport: Eric Veach Leonidas J. GuibasDocument12 pagesMetropolis Light Transport: Eric Veach Leonidas J. GuibasCyrille LamasséNo ratings yet
- Analysis of Planar Light Fields From Homogeneous Convex Curved Surfaces Under Distant IlluminationDocument14 pagesAnalysis of Planar Light Fields From Homogeneous Convex Curved Surfaces Under Distant IlluminationCyrille LamasséNo ratings yet
- From Image-Based Motion Analysis To Free-Viewpoint Video: Christian TheobaltDocument235 pagesFrom Image-Based Motion Analysis To Free-Viewpoint Video: Christian TheobaltCyrille LamasséNo ratings yet
- On The Relationship Between Radiance and Irradiance: Determining The Illumination From Images of A Convex Lambertian ObjectDocument12 pagesOn The Relationship Between Radiance and Irradiance: Determining The Illumination From Images of A Convex Lambertian ObjectCyrille LamasséNo ratings yet
- Accurate Face Models From Uncalibrated and Ill-Lit Video SequencesDocument9 pagesAccurate Face Models From Uncalibrated and Ill-Lit Video SequencesCyrille LamasséNo ratings yet
- Comparing Efficiency of Integration Methods For Cloth SimulationDocument8 pagesComparing Efficiency of Integration Methods For Cloth SimulationCyrille LamasséNo ratings yet
- Virtual Fashion Show Using Real-Time Markerless Motion CaptureDocument10 pagesVirtual Fashion Show Using Real-Time Markerless Motion CaptureCyrille LamasséNo ratings yet
- Morphological Modeling and Deformation of 3D Objects: by Samuel Boivin, André Gagalowicz and Youichi HorryDocument25 pagesMorphological Modeling and Deformation of 3D Objects: by Samuel Boivin, André Gagalowicz and Youichi HorryCyrille LamasséNo ratings yet
- View-Based Location and Tracking of Body Parts For Visual InteractionDocument10 pagesView-Based Location and Tracking of Body Parts For Visual InteractionCyrille LamasséNo ratings yet
- Articulated Body Motion Capture by Stochastic SearchDocument21 pagesArticulated Body Motion Capture by Stochastic SearchCyrille LamasséNo ratings yet
- A System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteDocument7 pagesA System For Marker-Less Motion Capture: B. Rosenhahn, T. Brox, U. G. Kersting, A. W. Smith, J. K. Gurney, and R. KletteCyrille LamasséNo ratings yet
- Markerless Human Motion Capture Through Visual Hull and Articulated ICPDocument5 pagesMarkerless Human Motion Capture Through Visual Hull and Articulated ICPCyrille LamasséNo ratings yet
- Experiments in Immersive Virtual Realityfor Scientific VisualizationDocument21 pagesExperiments in Immersive Virtual Realityfor Scientific VisualizationCyrille LamasséNo ratings yet
- On Computing Exact Visual Hulls of Solids Bounded by Smooth SurfacesDocument6 pagesOn Computing Exact Visual Hulls of Solids Bounded by Smooth SurfacesCyrille LamasséNo ratings yet
- View Synthesis Using Convex and Visual HullsDocument10 pagesView Synthesis Using Convex and Visual HullsCyrille LamasséNo ratings yet
- Approach of Heterogeneous Bio-Modeling Based On Material FeaturesDocument12 pagesApproach of Heterogeneous Bio-Modeling Based On Material FeaturesCyrille LamasséNo ratings yet
- A Novel Interaction Metaphor For Personal Environment Control: Direct Manipulation of Physical Environment Based On 3D VisualizationDocument9 pagesA Novel Interaction Metaphor For Personal Environment Control: Direct Manipulation of Physical Environment Based On 3D VisualizationCyrille LamasséNo ratings yet
- Marker-Free Model Reconstruction and Motion Tracking From 3D Voxel DataDocument10 pagesMarker-Free Model Reconstruction and Motion Tracking From 3D Voxel DataCyrille LamasséNo ratings yet
- Handling Sectional Views in Volume-Based Approach To Automatically Construct 3D Solid From 2D ViewsDocument11 pagesHandling Sectional Views in Volume-Based Approach To Automatically Construct 3D Solid From 2D ViewsCyrille LamasséNo ratings yet
- Deformable Simulation Using Force Propagation Model With Finite Element OptimizationDocument10 pagesDeformable Simulation Using Force Propagation Model With Finite Element OptimizationCyrille LamasséNo ratings yet
- Markerless Motion Capture of Complex Human Movements From Multiple ViewsDocument148 pagesMarkerless Motion Capture of Complex Human Movements From Multiple ViewsCyrille LamasséNo ratings yet
- Augmented Reeb Graphs For Content-Based Retrieval of 3D Mesh ModelsDocument10 pagesAugmented Reeb Graphs For Content-Based Retrieval of 3D Mesh ModelsCyrille LamasséNo ratings yet
- Human Body Modeling From Video Sequences: Left Center RightDocument8 pagesHuman Body Modeling From Video Sequences: Left Center RightCyrille LamasséNo ratings yet
- Cartoon Textures: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Document10 pagesCartoon Textures: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Cyrille LamasséNo ratings yet
- 3D Articulated Models and Multi-View Tracking With SilhouettesDocument6 pages3D Articulated Models and Multi-View Tracking With SilhouettesCyrille LamasséNo ratings yet
- Progressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingDocument12 pagesProgressive Reconstruction of 3D Objects From A Single Free-Hand Line DrawingCyrille LamasséNo ratings yet
- Implementing Fast Cloth Simulation With Collision ResponseDocument10 pagesImplementing Fast Cloth Simulation With Collision ResponseCyrille LamasséNo ratings yet
- UntitledDocument73 pagesUntitledCyrille LamasséNo ratings yet
- Markerless Motion Capture: Paris Kaimakis August 31, 2004Document66 pagesMarkerless Motion Capture: Paris Kaimakis August 31, 2004Cyrille LamasséNo ratings yet
- Decomposing Cloth: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Document9 pagesDecomposing Cloth: Eurographics/ACM SIGGRAPH Symposium On Computer Animation (2004) R. Boulic, D. K. Pai (Editors)Cyrille LamasséNo ratings yet
- Comparison of Thermocouples, RTDS, and ThermistorsDocument2 pagesComparison of Thermocouples, RTDS, and ThermistorsAlwyzz Happie RaamzzNo ratings yet
- Centrifugal Pump - What Is The Purpose of Minimum FlowDocument3 pagesCentrifugal Pump - What Is The Purpose of Minimum Flowjesus_manrique2753No ratings yet
- Turbo Supervisory Instruments: Presenter: Chona (C & I)Document25 pagesTurbo Supervisory Instruments: Presenter: Chona (C & I)Morassa Chona100% (1)
- SyaminDocument1 pageSyaminNazrin ManshorNo ratings yet
- ASTM Standard (Vol 1.04) A 131 - A131M - 94Document5 pagesASTM Standard (Vol 1.04) A 131 - A131M - 94astrogildoNo ratings yet
- Finite Element Analysis of Bamboo PDFDocument12 pagesFinite Element Analysis of Bamboo PDFPatrick Ehi ImoisiliNo ratings yet
- Crane Wire RopeDocument32 pagesCrane Wire RopeRajmohan Babu100% (3)
- The Particle Nature of MatterDocument25 pagesThe Particle Nature of MatterMaria bonny aquinoNo ratings yet
- The Use of Pyrosim Graphical User Interface For Fds Simulation of A Cinema FireDocument9 pagesThe Use of Pyrosim Graphical User Interface For Fds Simulation of A Cinema Firebuha_buhaNo ratings yet
- AmreadDocument330 pagesAmreadThangarajNo ratings yet
- 11-SuperCritical Fluid ChromatographyDocument6 pages11-SuperCritical Fluid ChromatographyGopiNo ratings yet
- Steam O&MDocument28 pagesSteam O&MmadiNo ratings yet
- Control ValveDocument39 pagesControl ValvewirawansatriaNo ratings yet
- Transistor PNP 2SB709 TV SonyDocument3 pagesTransistor PNP 2SB709 TV SonyJose PerezNo ratings yet
- Center of Gravity Vs Center of MassDocument25 pagesCenter of Gravity Vs Center of Massguptafamily1992No ratings yet
- Accelerated Cable Life TestingDocument37 pagesAccelerated Cable Life TestingAli NaderianNo ratings yet
- (Aalto University) Lecture 6 - Stress Intensity FactorDocument21 pages(Aalto University) Lecture 6 - Stress Intensity FactorShazwanShahNo ratings yet
- Practical Mind ReadingDocument106 pagesPractical Mind Readingaruen7980% (5)
- Gen MathDocument19 pagesGen MathMiraflorNo ratings yet
- Measurement: Conversion of Units of MeasurementDocument28 pagesMeasurement: Conversion of Units of MeasurementRichel Borres MangmangNo ratings yet
- STS Lesson 2Document30 pagesSTS Lesson 2Reymond Lupoz IINo ratings yet
- 2020 Pavement Design ManualDocument660 pages2020 Pavement Design ManualBitbitter100% (1)
- Mathematics 1a 1Document2 pagesMathematics 1a 1Rajesh PinjarlaNo ratings yet
- Electrical Energy and Current: Additional Practice CDocument2 pagesElectrical Energy and Current: Additional Practice CMona Mohamed SafwatNo ratings yet
- Advances in Mass Spectrometry For LipidomicsDocument35 pagesAdvances in Mass Spectrometry For LipidomicsAna Paula PetiNo ratings yet
- Types of ParagraphDocument7 pagesTypes of ParagraphSantiago Jr KadusaleNo ratings yet