Download as pdf or txt
You might also like
- Call Center MathematicsDocument76 pagesCall Center Mathematicscopernicus_newton89% (19)
- UNIFIED MATH 10 FIRST PERIODIC TEST With Answer KeyDocument5 pagesUNIFIED MATH 10 FIRST PERIODIC TEST With Answer KeyJUVELYN BELLITA92% (181)
- Notes On Practical Astronomy and Geodesy 1921 PDFDocument113 pagesNotes On Practical Astronomy and Geodesy 1921 PDFjohn silverNo ratings yet
- AS3010: Introduction To Space Technology: Part B, Lectures 3 & 4 09 March, 2017Document12 pagesAS3010: Introduction To Space Technology: Part B, Lectures 3 & 4 09 March, 2017Abdul WakeelNo ratings yet
- Dome SynchronisationDocument20 pagesDome Synchronisationmaurice falzonNo ratings yet
- Al Tusi IngleseDocument15 pagesAl Tusi IngleseAmund BjorsnesNo ratings yet
- 35 Trigonometry III (MSS)Document30 pages35 Trigonometry III (MSS)Srinivas VamsiNo ratings yet
- Cylindrical Coordinate System: DefinitionDocument11 pagesCylindrical Coordinate System: DefinitionMujtaba KhanNo ratings yet
- Geometry On The Sphere PDFDocument13 pagesGeometry On The Sphere PDFGopi GaNo ratings yet
- Orbit1 PDFDocument3 pagesOrbit1 PDFMohammed Jameel UddinNo ratings yet
- The Maximum Brightness of VenusDocument9 pagesThe Maximum Brightness of VenuslportoNo ratings yet
- 1a-Orbital ParametersDocument19 pages1a-Orbital ParametersMehaboob MujawarNo ratings yet
- The Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFDocument17 pagesThe Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFhemakhannaNo ratings yet
- 9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureDocument4 pages9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureVivek PanduNo ratings yet
- Computation of An EphemerisDocument33 pagesComputation of An EphemerisAnonymous US9AFTR02No ratings yet
- Braun and Mitchell 1983Document6 pagesBraun and Mitchell 1983Antony BanderasNo ratings yet
- Polar Equations of Conics: Alternative Definition of ConicDocument7 pagesPolar Equations of Conics: Alternative Definition of ConicBeto LangNo ratings yet
- Celm10 Computation of An EphemerisDocument33 pagesCelm10 Computation of An EphemerisStevieNgNo ratings yet
- Lecture 3Document18 pagesLecture 3TyDolla ChicoNo ratings yet
- Satellite Communication Lecture-2&3: Dr. Shahab Ahmad NiaziDocument72 pagesSatellite Communication Lecture-2&3: Dr. Shahab Ahmad Niazishahabniazi100% (3)
- EEE 201 Engineering Mathematics Assoc. Prof. Dr. Ertuğrul AKSOY Spherical CoordinatesDocument48 pagesEEE 201 Engineering Mathematics Assoc. Prof. Dr. Ertuğrul AKSOY Spherical Coordinates357911No ratings yet
- Electromagnetic Field TheoryDocument73 pagesElectromagnetic Field Theoryajas777BNo ratings yet
- Spacedynamics Tut 1Document6 pagesSpacedynamics Tut 1aero spaceNo ratings yet
- Kemh112 PDFDocument13 pagesKemh112 PDFsnehalNo ratings yet
- Chapter9 Geodetic Aspects of Celestial NavigationDocument4 pagesChapter9 Geodetic Aspects of Celestial NavigationYasser MetaweaNo ratings yet
- Captured Satellite Moves To Equatorial PlaneDocument3 pagesCaptured Satellite Moves To Equatorial PlaneJoseph StanovskyNo ratings yet
- The Use of Group Theory and Geometry in Physic Some Examples 1Document27 pagesThe Use of Group Theory and Geometry in Physic Some Examples 1H.S.ManiNo ratings yet
- UntitledDocument38 pagesUntitledBussari Abdul-Rahman AlabiNo ratings yet
- Spherical Law of Cosines: TheoremDocument4 pagesSpherical Law of Cosines: Theoremalvaro sosaNo ratings yet
- 3D Geometry (@BrilliantsAcademy)Document8 pages3D Geometry (@BrilliantsAcademy)Dandy H HerkoNo ratings yet
- Astronomy Course08Document128 pagesAstronomy Course08Hayder H J AmeenNo ratings yet
- Solid angles in perspective: Ω, have a small but essential role in physics. For example, howDocument8 pagesSolid angles in perspective: Ω, have a small but essential role in physics. For example, howashkarkabeer08No ratings yet
- Power Point Presentation On SPHERICAL TRIGONOMETRYDocument20 pagesPower Point Presentation On SPHERICAL TRIGONOMETRYSanchit GhadiNo ratings yet
- Kmath 719Document7 pagesKmath 719Ebn MisrNo ratings yet
- The Groups SO (3) and SUDocument7 pagesThe Groups SO (3) and SUMax PieriniNo ratings yet
- Comet Belt Beyond NeptuneDocument8 pagesComet Belt Beyond NeptuneParag MahajaniNo ratings yet
- Astronomi EnglishDocument26 pagesAstronomi EnglishRoiNo ratings yet
- Spherical Trigonometry: Kelly LynchDocument22 pagesSpherical Trigonometry: Kelly LynchOleksandr KupratyNo ratings yet
- Cordinates SpericalDocument13 pagesCordinates SpericalPanchal RohanNo ratings yet
- The Hyper-Stereographic Projection of The Four-Dimensional Hyper-SphereDocument6 pagesThe Hyper-Stereographic Projection of The Four-Dimensional Hyper-Spherenoon moonNo ratings yet
- Polar Coordinate System - WikipediaDocument22 pagesPolar Coordinate System - WikipediaDev 01No ratings yet
- Azərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinDocument21 pagesAzərbaycan Dövlət Dəniz Akademiyasi: Tərtib Edən: Osmanov ElçinФаиг ИсаевNo ratings yet
- Due September 28, Monday: Homework Set 4Document28 pagesDue September 28, Monday: Homework Set 4PragyaNo ratings yet
- Spherical Geometry: Exploring The World With Math: Ptolemy: Picture Courtesy ofDocument9 pagesSpherical Geometry: Exploring The World With Math: Ptolemy: Picture Courtesy ofsandy001_palNo ratings yet
- Earth CoordinatesDocument5 pagesEarth CoordinatesEndashaw DebruNo ratings yet
- Assignment On AstrophysicsDocument5 pagesAssignment On AstrophysicsNarayanan Elatchoumy PadyNo ratings yet
- Mathematical Model To Predict The Path of Orbit of Heavenly BodyDocument4 pagesMathematical Model To Predict The Path of Orbit of Heavenly BodyPriya Sharma100% (1)
- 1978 May 585-596#space Oblique ProjDocument12 pages1978 May 585-596#space Oblique Projhbl3688No ratings yet
- Wolfgang Hasse and Volker Perlick - Gravitational Lensing in Spherically Symmetric Static Spacetimes With Centrifugal Force ReversalDocument18 pagesWolfgang Hasse and Volker Perlick - Gravitational Lensing in Spherically Symmetric Static Spacetimes With Centrifugal Force ReversalKunma050No ratings yet
- Ch-14 RD MathsDocument60 pagesCh-14 RD MathsThe VRAJ GAMESNo ratings yet
- 33 Trigonometry I (MSS)Document31 pages33 Trigonometry I (MSS)Srinivas VamsiNo ratings yet
- Polar Coordinate System: AzimuthDocument16 pagesPolar Coordinate System: AzimuthKrishanu ModakNo ratings yet
- Ch-11 (3D Geometry) PDFDocument13 pagesCh-11 (3D Geometry) PDFChinmaya Ranjan JenaNo ratings yet
- Comp of Azimuth EleDocument6 pagesComp of Azimuth EleJabNo ratings yet
- Keep212 PDFDocument17 pagesKeep212 PDFshubhamkhandeNo ratings yet
- Lowrie SolutionDocument19 pagesLowrie SolutionVijay Yadav100% (1)
- Geometric GeodesyDocument90 pagesGeometric GeodesyLoki Balder BaldoviNo ratings yet
- A Celestial Sphere Model in Geogebra: Elisa Soriano Fischer Secondary School Department of Mathematics, Pradolongo SchoolDocument16 pagesA Celestial Sphere Model in Geogebra: Elisa Soriano Fischer Secondary School Department of Mathematics, Pradolongo SchoolYC ChanNo ratings yet
- Spherical Trigonometry, For The Use Of Colleges And Schools, With Numerous ExamplesFrom EverandSpherical Trigonometry, For The Use Of Colleges And Schools, With Numerous ExamplesNo ratings yet
- Reviewer 3Document15 pagesReviewer 3Juan CarlosNo ratings yet
- Sikafloor Conductive Electrostatic Control Epoxy System - SAMPLE SPECIFICATIONDocument8 pagesSikafloor Conductive Electrostatic Control Epoxy System - SAMPLE SPECIFICATIONJuan CarlosNo ratings yet
- Open Punchlist - ZocalloDocument1 pageOpen Punchlist - ZocalloJuan CarlosNo ratings yet
- Sevina Park - Block 3 & 5 Villas (Take Over Units) Cp01 General Construction Works (Take Over Works)Document2 pagesSevina Park - Block 3 & 5 Villas (Take Over Units) Cp01 General Construction Works (Take Over Works)Juan CarlosNo ratings yet
- Inventory (GIP)Document16 pagesInventory (GIP)Juan CarlosNo ratings yet
- Allocation of Plumbing Fixture (16 Sept. 2022)Document1 pageAllocation of Plumbing Fixture (16 Sept. 2022)Juan CarlosNo ratings yet
- UntitledDocument149 pagesUntitledJuan CarlosNo ratings yet
- GEZE Montageanleitung EN 894981Document48 pagesGEZE Montageanleitung EN 894981Juan CarlosNo ratings yet
- Methodology BulkheadDocument2 pagesMethodology BulkheadJuan CarlosNo ratings yet
- Acoustic Drawing ListDocument6 pagesAcoustic Drawing ListJuan CarlosNo ratings yet
- Astronomical Azimuth Determination by The Hour Angle of Polaris Using Ordinary Total StationsDocument9 pagesAstronomical Azimuth Determination by The Hour Angle of Polaris Using Ordinary Total StationsJuan CarlosNo ratings yet
- Surveying Instruments - Their Design Construction Testing and Adjustment 1926Document334 pagesSurveying Instruments - Their Design Construction Testing and Adjustment 1926Juan CarlosNo ratings yet
- YALE - Y Series - Door Closer K990 SERIESDocument3 pagesYALE - Y Series - Door Closer K990 SERIESJuan CarlosNo ratings yet
- Dortek - Slimdrive EMD-FDocument4 pagesDortek - Slimdrive EMD-FJuan CarlosNo ratings yet
- CP16 - MT - GEN - ID - 0031 (0) (1) - CompressedDocument28 pagesCP16 - MT - GEN - ID - 0031 (0) (1) - CompressedJuan CarlosNo ratings yet
- Language For Learning 2nd Ed Preview PacketDocument14 pagesLanguage For Learning 2nd Ed Preview PacketAlcantara KleinNo ratings yet
- Method For Finding Stress in Cylinders With Radial NozzlesDocument10 pagesMethod For Finding Stress in Cylinders With Radial NozzlesmatodelanusNo ratings yet
- LTE Quick Reference: Go Back To IndexDocument3 pagesLTE Quick Reference: Go Back To IndexEfosa AigbeNo ratings yet
- Class 3 Lever Effort Force CalculationDocument6 pagesClass 3 Lever Effort Force CalculationVenkateswaran venkateswaranNo ratings yet
- Computer Graphics Solved MCQs (Set-1)Document5 pagesComputer Graphics Solved MCQs (Set-1)Muhammad HussainNo ratings yet
- MOM OU Old Question PaperDocument2 pagesMOM OU Old Question PaperAmmineni Syam PrasadNo ratings yet
- Quantitative Techniques Trimester 1 Mba Ktu 2016Document2 pagesQuantitative Techniques Trimester 1 Mba Ktu 2016Athul RNo ratings yet
- Complex Number TheoryDocument33 pagesComplex Number Theorynayla winNo ratings yet
- Lecture 9 and 10 - Multi-Function Systems - Disaggregation, Allocation, Sys Expansion - S18Document94 pagesLecture 9 and 10 - Multi-Function Systems - Disaggregation, Allocation, Sys Expansion - S18Francisco AraujoNo ratings yet
- The Flying Ice CubeDocument15 pagesThe Flying Ice Cubebitted2No ratings yet
- Vector and Tensor AnalysisDocument5 pagesVector and Tensor AnalysisAvandhiNo ratings yet
- Notes On PSODocument4 pagesNotes On PSOAllan MarbaniangNo ratings yet
- Aops Community 2008 China Team Selection TestDocument4 pagesAops Community 2008 China Team Selection TestK. M. Junayed AhmedNo ratings yet
- Polytropic Process PDFDocument1 pagePolytropic Process PDFClarence De LeonNo ratings yet
- Flux & FluxMotor New Features 12.2Document88 pagesFlux & FluxMotor New Features 12.2luis900000No ratings yet
- 8 - Energy Balance of Solar CollectorsDocument27 pages8 - Energy Balance of Solar Collectorsftsebeek6164No ratings yet
- Comparative Study of RC Multi-Storey Building Subjected To Elevated Temperature For Different StoreysDocument31 pagesComparative Study of RC Multi-Storey Building Subjected To Elevated Temperature For Different StoreyskarthiksampNo ratings yet
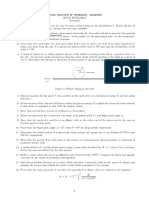
- National Institute of Technology Rourkela: Answer All Questions. Figures in The Right Hand Margin Indicate MarksDocument3 pagesNational Institute of Technology Rourkela: Answer All Questions. Figures in The Right Hand Margin Indicate MarksAyusna SubudhiNo ratings yet
- General Critical Graduate Test BatteryDocument40 pagesGeneral Critical Graduate Test Batterytauseef1716No ratings yet
- Question Bank Ust 6501 - Design and Analysis of ExperimentsDocument3 pagesQuestion Bank Ust 6501 - Design and Analysis of ExperimentsSree NathNo ratings yet
- Soil Engineering & Geotechnics: Analysis of Potential ProblemsDocument1 pageSoil Engineering & Geotechnics: Analysis of Potential ProblemsdzingoNo ratings yet
- Object Oriented Programming-Polymorphism - Virtual FunctionsDocument12 pagesObject Oriented Programming-Polymorphism - Virtual FunctionsfawmisNo ratings yet
- AVIA Template2021Document5 pagesAVIA Template2021mahruri arifNo ratings yet
- Ens185 - Lesson 03Document11 pagesEns185 - Lesson 03rockyidris2No ratings yet
- DELEX 23.24nuevo3Document61 pagesDELEX 23.24nuevo3zo diacNo ratings yet
- Circular Motion DLP 062019Document5 pagesCircular Motion DLP 062019IRISNo ratings yet
- Tutorial Pro Mekanika Pro EngineerDocument13 pagesTutorial Pro Mekanika Pro Engineernanrudi6404No ratings yet