Download as pdf or txt
You might also like
- Modeling and Analysis of Stochastic Systems 3rd Kulkarni Solution ManualDocument8 pagesModeling and Analysis of Stochastic Systems 3rd Kulkarni Solution ManualJamesAndersongoki94% (35)
- hw7 - Sol 2Document15 pageshw7 - Sol 2zachNo ratings yet
- Hw2sol PDFDocument15 pagesHw2sol PDFPei JingNo ratings yet
- 7 ElevenDocument2 pages7 ElevenyoosahuNo ratings yet
- Apostol Chapter 02 SolutionsDocument23 pagesApostol Chapter 02 SolutionsGeo JosNo ratings yet
- A3 SolutionDocument2 pagesA3 SolutionMickey WongNo ratings yet
- Solusi 4.18Document4 pagesSolusi 4.18MivTah Al BughisiyyahNo ratings yet
- Recitation U04-Conditioning Example-SolDocument1 pageRecitation U04-Conditioning Example-SolganiyamanNo ratings yet
- Lagrange's Theorem: 1 NotationsDocument8 pagesLagrange's Theorem: 1 NotationsNadiaNo ratings yet
- Chapter 8: Markov Chains: Yunghsiang S. HanDocument25 pagesChapter 8: Markov Chains: Yunghsiang S. HanRaj ThakurNo ratings yet
- Chapter 1 - Conditional Probability and Conditional ExpectationDocument34 pagesChapter 1 - Conditional Probability and Conditional ExpectationMETEORNo ratings yet
- Var Mean SampleDocument14 pagesVar Mean SampleReetika ChoudhuryNo ratings yet
- Markov ChainsDocument55 pagesMarkov Chainsswofe1No ratings yet
- CH 4Document33 pagesCH 4hung13579No ratings yet
- FTex1 SolutionsDocument2 pagesFTex1 SolutionsEDU CIPANANo ratings yet
- ch2 Recursive State EstimationDocument12 pagesch2 Recursive State EstimationksevillanocolinaNo ratings yet
- Solutions To Homework ThreeDocument17 pagesSolutions To Homework ThreeamyNo ratings yet
- 9 - Markov ChainsDocument14 pages9 - Markov ChainsTuấn ĐỗNo ratings yet
- Solution To HW#1: Yucheng Tu and Sean Curry April 13, 2019Document4 pagesSolution To HW#1: Yucheng Tu and Sean Curry April 13, 2019I KAZZENo ratings yet
- On Some Identities and Generating Functions For K-Pell Sequences and Chebyshev PolynomialsDocument13 pagesOn Some Identities and Generating Functions For K-Pell Sequences and Chebyshev PolynomialsPerepePereNo ratings yet
- Fall 2009: I I I IDocument4 pagesFall 2009: I I I IRobinson Ortega MezaNo ratings yet
- Sobolev Freud PolynomialsDocument17 pagesSobolev Freud PolynomialsMuhammad AmmarNo ratings yet
- STAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018Document14 pagesSTAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018DRizky Aziz SyaifudinNo ratings yet
- Best QuestionDocument6 pagesBest QuestionNamdevNo ratings yet
- Ma 128 A Lecture Week 4 NewtonDocument51 pagesMa 128 A Lecture Week 4 NewtonNatalia GrijalbaNo ratings yet
- Inverse Trigonometric FunctionsDocument70 pagesInverse Trigonometric FunctionsGarvit Raj DevangNo ratings yet
- FL10 PDFDocument30 pagesFL10 PDFVrundNo ratings yet
- Mathematical Foundations of Computer Science Lecture OutlineDocument4 pagesMathematical Foundations of Computer Science Lecture OutlineChenyang FangNo ratings yet
- Mathematical Foundations of Computer Science Lecture OutlineDocument4 pagesMathematical Foundations of Computer Science Lecture OutlineChenyang FangNo ratings yet
- Simple Random Sampling Without Replacement in A Finite Population. Personnal Notes On The Variance of The Sample MeanDocument15 pagesSimple Random Sampling Without Replacement in A Finite Population. Personnal Notes On The Variance of The Sample MeanNew UserNo ratings yet
- Stochastic I GRP PDFDocument6 pagesStochastic I GRP PDFChenyang FangNo ratings yet
- Note LpspacesDocument5 pagesNote Lpspacesfarsamuels183No ratings yet
- Math 462: HW5 Solutions: Due On August 15, 2014Document9 pagesMath 462: HW5 Solutions: Due On August 15, 2014Ivan JanitraNo ratings yet
- Solutions Manual To Accompany Probability Random Processes For Electrical Computer Engineers 9780521864701Document24 pagesSolutions Manual To Accompany Probability Random Processes For Electrical Computer Engineers 9780521864701eozoicjaggern2ni4No ratings yet
- Chapter 2 - Markov Chains Models For EpidemicsDocument8 pagesChapter 2 - Markov Chains Models For EpidemicsLamine Mane ManéNo ratings yet
- Negative BinomialDocument4 pagesNegative Binomialqwertypushkar123No ratings yet
- Numerical Analysis - Lecture 3: Mathematical Tripos Part IB: Lent 2010Document2 pagesNumerical Analysis - Lecture 3: Mathematical Tripos Part IB: Lent 2010Sree Manish ChadaNo ratings yet
- 0709 2661Document6 pages0709 2661Melek GüngörNo ratings yet
- Equations and Inequalities Involving V (N!) : Mhassani@iasbs - Ac.irDocument8 pagesEquations and Inequalities Involving V (N!) : Mhassani@iasbs - Ac.irИвайло ВасилевNo ratings yet
- Pset9 18781Document6 pagesPset9 18781pintugodNo ratings yet
- Sufficient 6Document3 pagesSufficient 6RHLNo ratings yet
- Probability and Stochastic Process 21Document12 pagesProbability and Stochastic Process 21tarungajjuwaliaNo ratings yet
- SolutionsDocument27 pagesSolutionsAthmajan VuNo ratings yet
- Ifo Theo&Coding-Compiled-PSSDocument156 pagesIfo Theo&Coding-Compiled-PSSRakshaNo ratings yet
- Handout 3: MA 202 - Probability and StatisticsDocument12 pagesHandout 3: MA 202 - Probability and StatisticsSharath ReddyNo ratings yet
- Lec14 ArithmetcFunctions1Document2 pagesLec14 ArithmetcFunctions1James MlotshwaNo ratings yet
- Imc2023 Day1 SolutionsDocument5 pagesImc2023 Day1 SolutionsAngga NurohmanNo ratings yet
- tmp8F3C TMPDocument14 pagestmp8F3C TMPFrontiersNo ratings yet
- PS2 - Answer SheetDocument4 pagesPS2 - Answer Sheet梁忠诚No ratings yet
- Probability and Statistics Hints/Solutions To Assignment No. 2Document2 pagesProbability and Statistics Hints/Solutions To Assignment No. 2Praveen BvsNo ratings yet
- Cadeia de MarkovDocument184 pagesCadeia de MarkovFelicio MugauaNo ratings yet
- Processos Estoc Asticos: Augusto GadelhaDocument22 pagesProcessos Estoc Asticos: Augusto GadelhaIoneide SoaresNo ratings yet
- CH 15Document19 pagesCH 15aNo ratings yet
- Euler's Phi FunctionDocument43 pagesEuler's Phi FunctionJames DunkelfelderNo ratings yet
- Probability DistributionDocument20 pagesProbability DistributionSyed XiyanNo ratings yet
- Speech Prediction (029-031)Document12 pagesSpeech Prediction (029-031)prathikNo ratings yet
- Fall 2008Document4 pagesFall 2008Robinson Ortega MezaNo ratings yet
- Derivation of The Jordan-Wigner Transformation: 1 Second QuantizationDocument2 pagesDerivation of The Jordan-Wigner Transformation: 1 Second QuantizationJay WhitfieldNo ratings yet
- Discrete Time Markov ChainsDocument59 pagesDiscrete Time Markov ChainsIsabella AlvarengaNo ratings yet
- FCDS - RA ch4 Sp21Document18 pagesFCDS - RA ch4 Sp21bashighschool888No ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Capital Structure Theories - Optimal Capital Structure 1Document41 pagesCapital Structure Theories - Optimal Capital Structure 1Mr. PsychoNo ratings yet
- Lecture PlanDocument1 pageLecture PlanMr. PsychoNo ratings yet
- Random ForestDocument2 pagesRandom ForestMr. PsychoNo ratings yet
- Exp3 Factor Analysis 1Document22 pagesExp3 Factor Analysis 1Mr. PsychoNo ratings yet
- Assignment 1Document5 pagesAssignment 1Mr. PsychoNo ratings yet
- Eco AssignmentDocument10 pagesEco AssignmentMr. PsychoNo ratings yet
- Week 3 and 4 SlidesDocument33 pagesWeek 3 and 4 SlidesMr. PsychoNo ratings yet
- Assignment On Network TheoremDocument4 pagesAssignment On Network TheoremMr. PsychoNo ratings yet
- Inventory AccountingDocument27 pagesInventory AccountingMr. PsychoNo ratings yet
- Padhaku Academy: Scanned by CamscannerDocument2 pagesPadhaku Academy: Scanned by CamscannerMr. PsychoNo ratings yet
- Algebra Part-1Document24 pagesAlgebra Part-1Mr. PsychoNo ratings yet
- L2.5 Using A Compound Light Microscope OptDocument8 pagesL2.5 Using A Compound Light Microscope Optochattc100% (1)
- Structural Engineering ModuleDocument208 pagesStructural Engineering ModuleEstifanos SeidNo ratings yet
- 2023 01 Earth CoreDocument5 pages2023 01 Earth CoreNico Vercellino KrauseNo ratings yet
- Yunus Et Al, 2015 - Geophysics Field Camp (GFC)Document6 pagesYunus Et Al, 2015 - Geophysics Field Camp (GFC)Muhammad YusriadyNo ratings yet
- Circular No 125Document12 pagesCircular No 125naiksavita766No ratings yet
- SQL Essentials PDFDocument36 pagesSQL Essentials PDFMadalina GrigoroiuNo ratings yet
- Maximum Performance in Laundry: Unimac® Product Overview 2022Document13 pagesMaximum Performance in Laundry: Unimac® Product Overview 2022mandster1978No ratings yet
- Skew NessDocument3 pagesSkew NessAnonymous hb1V5gNo ratings yet
- Athena Users1 PDFDocument436 pagesAthena Users1 PDFAnonymous eWMnRr70qNo ratings yet
- ASTM E135 08e1Document2 pagesASTM E135 08e1IMEDAL AluminioNo ratings yet
- Internet Control Message ProtocolDocument86 pagesInternet Control Message Protocolkshitij avhadNo ratings yet
- Was Heidegger A Mystic?: Jeff GuilfordDocument9 pagesWas Heidegger A Mystic?: Jeff GuilfordDursun NaimNo ratings yet
- Renesas Application Note AN1340Document6 pagesRenesas Application Note AN1340Rip_BarNo ratings yet
- Rotochambers: DescriptionDocument4 pagesRotochambers: DescriptionPABLONo ratings yet
- Low Leakage Fully Half - Select - Free Robust SRAM Cells With BTI Reliability AnalysisDocument12 pagesLow Leakage Fully Half - Select - Free Robust SRAM Cells With BTI Reliability AnalysisShabbirNo ratings yet
- Daily Report FormDocument7 pagesDaily Report FormFranklin0% (1)
- E StatementDocument3 pagesE StatementEvin JoyNo ratings yet
- Bill Tai of Charles River Ventures TranscriptDocument4 pagesBill Tai of Charles River Ventures TranscriptDocumented at Davos 2011 - Presented by ScribdNo ratings yet
- Article: ZootaxaDocument14 pagesArticle: ZootaxaSabrina Nur Fitri 2004125073No ratings yet
- A Study On Marketing Activities and Consumer Response For D-MartDocument30 pagesA Study On Marketing Activities and Consumer Response For D-MartUdayabhanu SwainNo ratings yet
- Is Iso 2631 2 2003 PDFDocument17 pagesIs Iso 2631 2 2003 PDFCarl VegaNo ratings yet
- Visionis Biometric Solutions Vis 3015 Vis 3016 Vis 3013 ENGDocument14 pagesVisionis Biometric Solutions Vis 3015 Vis 3016 Vis 3013 ENGolivier.bigouretNo ratings yet
- Selectiva 4.0Document2 pagesSelectiva 4.0عثمان الاغبزيNo ratings yet
- Fibonacci NumberDocument291 pagesFibonacci NumbersrikantsauravNo ratings yet
- Introduction To Research An - (Z-Library)Document284 pagesIntroduction To Research An - (Z-Library)espoirsdentisteNo ratings yet
- MSM Tech List 125mm TapnaDocument2 pagesMSM Tech List 125mm TapnaThanosaekk P.No ratings yet
- Tolerance and FitsDocument36 pagesTolerance and Fitsdevin wibowoNo ratings yet
- Design of Trestle "TF1" and Beams AboveDocument8 pagesDesign of Trestle "TF1" and Beams AbovePartha Gangopadhyay100% (3)
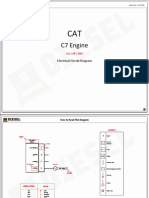
- CAT - C7 (All Others) .Prefix KAL or SAP1-3955Document9 pagesCAT - C7 (All Others) .Prefix KAL or SAP1-3955Phil B.No ratings yet