Download as pdf or txt
You might also like
- A-level Physics Revision: Cheeky Revision ShortcutsFrom EverandA-level Physics Revision: Cheeky Revision ShortcutsRating: 3 out of 5 stars3/5 (10)
- Electronic Circuits I, II - Lecture Notes, Study Materials and Important Questions AnswersDocument5 pagesElectronic Circuits I, II - Lecture Notes, Study Materials and Important Questions AnswersBrainKart ComNo ratings yet
- Lec23 PDFDocument32 pagesLec23 PDFpankaj rangareeNo ratings yet
- Lec 5Document13 pagesLec 5Arti TyagiNo ratings yet
- Lec 6Document9 pagesLec 6Arti TyagiNo ratings yet
- Lec 9 FFDocument28 pagesLec 9 FFdavid lyodNo ratings yet
- Lec 5Document32 pagesLec 5SahibaNo ratings yet
- Lec 9Document7 pagesLec 9Arti TyagiNo ratings yet
- Lec 2Document10 pagesLec 2Pramod KulkarniNo ratings yet
- Lec24 PDFDocument35 pagesLec24 PDFpankaj rangareeNo ratings yet
- Lec 24Document18 pagesLec 24delinquent_abhishekNo ratings yet
- RFIC LNA 3 S. ChatterjeeDocument15 pagesRFIC LNA 3 S. ChatterjeePraful KabadiNo ratings yet
- L4Document25 pagesL4vswapnil2212No ratings yet
- Advanced Hydraulics Prof. Dr. Suresh A. Kartha Department of Civil Engineering Indian Institute of Technology, GuwahatiDocument25 pagesAdvanced Hydraulics Prof. Dr. Suresh A. Kartha Department of Civil Engineering Indian Institute of Technology, GuwahatiNaman BajajNo ratings yet
- Lec 12Document23 pagesLec 12Utkarsh VermaNo ratings yet
- Lec 5Document15 pagesLec 5Pattabhiram PuranamNo ratings yet
- Lec7 WaveDocument28 pagesLec7 WaveAnonymous MAQrYFQDzVNo ratings yet
- Lec 2Document26 pagesLec 2Kandarp BhattNo ratings yet
- Lec 13Document34 pagesLec 13Anonymous VKLiGSNo ratings yet
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 38Document27 pagesClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 38Anonymous 8f2veZfNo ratings yet
- Lec50 PDFDocument18 pagesLec50 PDFabm999No ratings yet
- Lec 6Document19 pagesLec 6vibhorkrnitrklNo ratings yet
- Rocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument26 pagesRocket Propulsion Prof. K. Ramamurthi Department of Mechanical Engineering Indian Institute of Technology, MadrasMohd TauqeerNo ratings yet
- Week 3-Wed TranscriptionDocument8 pagesWeek 3-Wed TranscriptionMico Moriel MusaNo ratings yet
- Week 3-Wed TranscriptionDocument8 pagesWeek 3-Wed TranscriptionMico Moriel MusaNo ratings yet
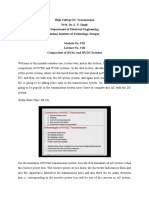
- High Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocument27 pagesHigh Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurAasim MallickNo ratings yet
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasDocument32 pagesWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasMuralidhar YarakalaNo ratings yet
- Lec 5Document47 pagesLec 5123juanreyesNo ratings yet
- Lec2 PDFDocument29 pagesLec2 PDFpankaj rangareeNo ratings yet
- Linear and Volumetric Deformation Perspectives From Mass ConservationDocument10 pagesLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeNo ratings yet
- High Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocument27 pagesHigh Voltage DC Transmission Prof. Dr. S. N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurvinoNo ratings yet
- Power Electronics Prof. B. G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 21Document16 pagesPower Electronics Prof. B. G. Fernandes Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 21Debashis ChakrabrtyNo ratings yet
- Common Gate Circuit PDFDocument15 pagesCommon Gate Circuit PDFVishnu KSNo ratings yet
- Lec20 PDFDocument27 pagesLec20 PDFpankaj rangareeNo ratings yet
- Lec22 PDFDocument23 pagesLec22 PDFvinoNo ratings yet
- File PIbpjDENlDocument8 pagesFile PIbpjDENlSunil KumarNo ratings yet
- L3Document26 pagesL3vswapnil2212No ratings yet
- PLL Basics ChaterjeeDocument16 pagesPLL Basics ChaterjeeSolleti Suresh4No ratings yet
- Lec 43Document21 pagesLec 43Pramod KulkarniNo ratings yet
- RFIC LNA 2 NPTEL S. ChatterjeeDocument14 pagesRFIC LNA 2 NPTEL S. ChatterjeePraful KabadiNo ratings yet
- Lec 51Document25 pagesLec 51Chintha VenuNo ratings yet
- Applied Thermodynamics For Marine Systems Prof. P. K. Das Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument13 pagesApplied Thermodynamics For Marine Systems Prof. P. K. Das Department of Mechanical Engineering Indian Institute of Technology, KharagpurTommyVercettiNo ratings yet
- Analog Circuits Prof. Nagendra Krishnapura Department of Electrical Engineering Indian Institute of Technology, Madras Module - 04 Lecture - 05Document4 pagesAnalog Circuits Prof. Nagendra Krishnapura Department of Electrical Engineering Indian Institute of Technology, Madras Module - 04 Lecture - 05harshaNo ratings yet
- Transmission Lines and E.M. Waves Lec 10Document31 pagesTransmission Lines and E.M. Waves Lec 10Vishnu ShashankNo ratings yet
- Lec 22Document28 pagesLec 22Shreyas Gupta 4-Yr B.Tech. Chemical Engg., IIT (BHU) VaranasiNo ratings yet
- Transmission Lines and E.M. Waves Lec 02Document31 pagesTransmission Lines and E.M. Waves Lec 02Vishnu ShashankNo ratings yet
- Lec 1Document17 pagesLec 1MishaalNo ratings yet
- High Voltage DC Transmission Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurDocument26 pagesHigh Voltage DC Transmission Prof. S.N. Singh Department of Electrical Engineering Indian Institute of Technology, KanpurAjin CRNo ratings yet
- Lec16 PDFDocument29 pagesLec16 PDFSai Krishna VelichetiNo ratings yet
- 02 - Sect 7 5 The Canonical Model - enDocument5 pages02 - Sect 7 5 The Canonical Model - enAnanatha KarthikNo ratings yet
- Lec12 PDFDocument18 pagesLec12 PDFJosNo ratings yet
- Lec 41Document16 pagesLec 41k krishna chaitanyaNo ratings yet
- Lec 7Document5 pagesLec 7Government Polytechnic Gulzarbagh Patna 7No ratings yet
- Lecture On TTLDocument16 pagesLecture On TTLAkhil M PNo ratings yet
- Lec 20Document23 pagesLec 20ArunaNo ratings yet
- Lec 21Document44 pagesLec 21ayush guptaNo ratings yet
- Lec 13Document15 pagesLec 13Kripa nandNo ratings yet
- Introduction To Fluid Mechanics Prof. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 39 Application of Bernoulli's Equation - Part - IIDocument8 pagesIntroduction To Fluid Mechanics Prof. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 39 Application of Bernoulli's Equation - Part - IIdjadja nakamayaNo ratings yet
- Lec37 PDFDocument24 pagesLec37 PDFrajat pandeyNo ratings yet
- Understanding Vector Calculus: Practical Development and Solved ProblemsFrom EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsNo ratings yet
- Lec 9Document7 pagesLec 9Arti TyagiNo ratings yet
- Lec 2Document11 pagesLec 2Arti TyagiNo ratings yet
- Lec 5Document13 pagesLec 5Arti TyagiNo ratings yet
- Lec 6Document9 pagesLec 6Arti TyagiNo ratings yet
- Lec 3Document12 pagesLec 3Arti TyagiNo ratings yet
- Basic ElectronicsDocument836 pagesBasic ElectronicsKhalid Yahya88% (24)
- University Question Bank - EdcDocument16 pagesUniversity Question Bank - EdcSenthil IlangovanNo ratings yet
- Electronic Circuit SliceDocument41 pagesElectronic Circuit SlicenhungdieubatchotNo ratings yet
- Top224yn PDFDocument20 pagesTop224yn PDFomarNo ratings yet
- Moritz 2008Document9 pagesMoritz 2008Jose Manuel Hermosilla AvilaNo ratings yet
- An-8201 FCM8201 Three-Phase Sine-Wave BLDC Motor ControllerDocument25 pagesAn-8201 FCM8201 Three-Phase Sine-Wave BLDC Motor ControllerFelipePerezNo ratings yet
- EE2002 Lab Manual Fall 2013Document15 pagesEE2002 Lab Manual Fall 2013Alex KeddyNo ratings yet
- Radio Shack Frequency CounterDocument32 pagesRadio Shack Frequency CounterMR XNo ratings yet
- SCR ApplicationsDocument26 pagesSCR ApplicationsRodz Gier JrNo ratings yet
- The FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingDocument3 pagesThe FET-OR Connection For Power Supplies: Backup Supply, Battery Operation, diode-OR, MOSFET, Power-Supply SequencingJonathan JaegerNo ratings yet
- Syllabus 2014Document102 pagesSyllabus 2014Ciby AbrahamNo ratings yet
- RJK 0351 Dpa DatasheetDocument7 pagesRJK 0351 Dpa DatasheetKevin TateNo ratings yet
- Rail To Rail Amplifier ProjectDocument19 pagesRail To Rail Amplifier Projectneva91No ratings yet
- Power Electronics - 2 MARKSDocument30 pagesPower Electronics - 2 MARKSkarthik kumar50% (4)
- Mass Update Sales Info Sainsbortim 19-05-2021 1621433127023Document106 pagesMass Update Sales Info Sainsbortim 19-05-2021 1621433127023Belajar IlmuNo ratings yet
- Highly Sensitive Piezo-Based Touch Sensor For Robotics ApplicationsDocument12 pagesHighly Sensitive Piezo-Based Touch Sensor For Robotics ApplicationsEdgar MongeNo ratings yet
- ECE 334 Lecture Chapter 16 InverterDocument20 pagesECE 334 Lecture Chapter 16 InverterSaied Aly SalamahNo ratings yet
- VNP20N07FI VNB20N07/VNV20N07: "Omnifet": Fully Autoprotected Power MosfetDocument13 pagesVNP20N07FI VNB20N07/VNV20N07: "Omnifet": Fully Autoprotected Power MosfetНаталія ЛіськевичNo ratings yet
- Mosfet: Metal Oxide Semiconductor Field Effect TransistorsDocument30 pagesMosfet: Metal Oxide Semiconductor Field Effect TransistorsMurad MirzeyevNo ratings yet
- Design and Analysis of Flipped Voltage Follower FollowerDocument5 pagesDesign and Analysis of Flipped Voltage Follower FollowerMadhur GuptaNo ratings yet
- ECE 658 VLSI Design - I Homework-III Due Date: September 29, 2016 Prof. D. MisraDocument2 pagesECE 658 VLSI Design - I Homework-III Due Date: September 29, 2016 Prof. D. MisraAnuj DsouzaNo ratings yet
- Infineon Power Application NoteDocument25 pagesInfineon Power Application Notejameschall1No ratings yet
- EDC Lecture NotesDocument187 pagesEDC Lecture NotesKARTHIKAMANI RNo ratings yet
- DatasheetDocument28 pagesDatasheetjesusNo ratings yet
- VLSI- תרגול 0 - Mosfet CapacitanceDocument2 pagesVLSI- תרגול 0 - Mosfet CapacitanceRonNo ratings yet
- 4th Sem SyllabusDocument3 pages4th Sem SyllabusRaimond RosarioNo ratings yet
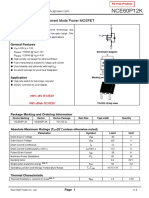
- Wuxi NCE Power Semiconductor NCE60P12K C326372Document7 pagesWuxi NCE Power Semiconductor NCE60P12K C326372Edith GandaraNo ratings yet
- HCPL 314JDocument14 pagesHCPL 314JonafetsNo ratings yet
- Unit 4 Biasing and StabilizationDocument36 pagesUnit 4 Biasing and StabilizationChiranjeeviNo ratings yet