Download as docx, pdf, or txt
You might also like
- Arduino - Advanced Methods and Strategies of Using ArduinoDocument149 pagesArduino - Advanced Methods and Strategies of Using ArduinoJorge Jockyman JuniorNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- CoCom Lists - 1991 SeptDocument100 pagesCoCom Lists - 1991 SeptSamuel Evans100% (1)
- Echolette BS40 1964Document13 pagesEcholette BS40 1964FanOfDanNo ratings yet
- Stepping Motor ControlDocument13 pagesStepping Motor ControlyumnabilalNo ratings yet
- ItlabDocument14 pagesItlabkrishna_cad28No ratings yet
- Microprocessor Project 2k17EC057Document18 pagesMicroprocessor Project 2k17EC057Devashish Pratap SinghNo ratings yet
- Ex - No 6 Parallel Communication Between Two MP Kits USING 8255Document2 pagesEx - No 6 Parallel Communication Between Two MP Kits USING 8255Anonymous c75J3yX33No ratings yet
- Description Features: Programmable Synchronous DC/DC Converter, Dual Low Dropout Regulator ControllerDocument12 pagesDescription Features: Programmable Synchronous DC/DC Converter, Dual Low Dropout Regulator ControllerthongleNo ratings yet
- HV9910BDB7 HV9910B PFC 40W LED Driver Demoboard: Specifications General DescriptionDocument5 pagesHV9910BDB7 HV9910B PFC 40W LED Driver Demoboard: Specifications General DescriptionNT372No ratings yet
- ADC0809CCNDocument16 pagesADC0809CCNFrancesca Castelar BenalcazarNo ratings yet
- IRG4BC30K-S: Features Features Features Features FeaturesDocument8 pagesIRG4BC30K-S: Features Features Features Features FeaturesRafael MonzonNo ratings yet
- MJH11017, MJH11019, MJH11021 (PNP) MJH11018, MJH11020, MJH11022 (NPN) Complementary Darlington Silicon Power TransistorsDocument8 pagesMJH11017, MJH11019, MJH11021 (PNP) MJH11018, MJH11020, MJH11022 (NPN) Complementary Darlington Silicon Power Transistorsbookreader1968No ratings yet
- 6-Pin Dip Optocouplers For Power Supply Applications (No Base Connection)Document11 pages6-Pin Dip Optocouplers For Power Supply Applications (No Base Connection)Alan Bastos LemeNo ratings yet
- 6116ASP20Document9 pages6116ASP20BeNz BarrigaNo ratings yet
- Elevador VoltajeDocument10 pagesElevador VoltajeFernando AugustoNo ratings yet
- MICRO LAB EXP 06 (Familiarization of Interfacing of Digital-To-Analog (DAC) Converter With 8086.) - ACSDocument5 pagesMICRO LAB EXP 06 (Familiarization of Interfacing of Digital-To-Analog (DAC) Converter With 8086.) - ACSShuvro Sankar SenNo ratings yet
- Irg 4 PF 50 WDocument8 pagesIrg 4 PF 50 WQuickerManNo ratings yet
- μP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerDocument16 pagesμP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerKasi ChinnaNo ratings yet
- μP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerDocument16 pagesμP Compatible A/D Converters with 8-Channel: ADC0808/ADC0809 8-Bit MultiplexerKudo ShinichiNo ratings yet
- MC34151 DDocument12 pagesMC34151 DMladen MuskinjaNo ratings yet
- Set 1 AnswersDocument22 pagesSet 1 AnswersgokulchandruNo ratings yet
- AIM: ADC Interface With 8086 APPARATUS: GSAS 86/88E Kit, ADC Interface Kit, Power Suppling Wires, Serial Data Transmission ProcedureDocument5 pagesAIM: ADC Interface With 8086 APPARATUS: GSAS 86/88E Kit, ADC Interface Kit, Power Suppling Wires, Serial Data Transmission Procedurenothing no100% (1)
- Optoacoplador Integrado 4N25Document7 pagesOptoacoplador Integrado 4N25aureliocsNo ratings yet
- Adc 0808Document14 pagesAdc 0808Vikas PatelNo ratings yet
- Ha 13563Document18 pagesHa 13563Danh ProNo ratings yet
- MC100EL1648 5 V ECL Voltage Controlled Oscillator Amplifier: DescriptionDocument16 pagesMC100EL1648 5 V ECL Voltage Controlled Oscillator Amplifier: DescriptionHudionoHoodNo ratings yet
- 74HC138Document10 pages74HC138jnax101No ratings yet
- Program For Interfacing 8279: 1. 8085 Microprocessor Kit 2. 8279 Interfacing Module 3. Power SupplyDocument21 pagesProgram For Interfacing 8279: 1. 8085 Microprocessor Kit 2. 8279 Interfacing Module 3. Power SupplySubhashini MurugesanNo ratings yet
- ICL7106, ICL7107, ICL7106S, ICL7107S: 3 / Digit, LCD/LED Display, A/D ConvertersDocument17 pagesICL7106, ICL7107, ICL7106S, ICL7107S: 3 / Digit, LCD/LED Display, A/D ConvertersDave MartzNo ratings yet
- FQPF8N80CDocument11 pagesFQPF8N80CWsad WsadNo ratings yet
- ICL7106-7107 (Harris)Document16 pagesICL7106-7107 (Harris)cgmannerheimNo ratings yet
- Adc and DacDocument5 pagesAdc and DaceswaranNo ratings yet
- LTC 2418 - Demo ManualDocument6 pagesLTC 2418 - Demo ManualYash KrNo ratings yet
- 74C922Document18 pages74C922Gunnar GodaraNo ratings yet
- Universal DC/DC Converter: (Top View)Document11 pagesUniversal DC/DC Converter: (Top View)Engine Tuning UpNo ratings yet
- TIP41, TIP41A, TIP41B, TIP41C (NPN) TIP42, TIP42A, TIP42B, TIP42C (PNP) Complementary Silicon Plastic Power TransistorsDocument7 pagesTIP41, TIP41A, TIP41B, TIP41C (NPN) TIP42, TIP42A, TIP42B, TIP42C (PNP) Complementary Silicon Plastic Power TransistorsJon JaceNo ratings yet
- 0804Document41 pages0804Mehanathan Maggie MikeyNo ratings yet
- 8051 SchematicDocument37 pages8051 SchematicShabeeb Ali OruvangaraNo ratings yet
- Interfacing 8086 With 8255Document32 pagesInterfacing 8086 With 8255Sunitha Josephine75% (4)
- Adc 0804Document41 pagesAdc 0804AndySilvandNo ratings yet
- ADC0844/ADC0848 8-Bit P Compatible A/D Converters With Multiplexer OptionsDocument20 pagesADC0844/ADC0848 8-Bit P Compatible A/D Converters With Multiplexer Optionsrazali1982No ratings yet
- Adc 0809Document12 pagesAdc 0809Carbon Nano TubeNo ratings yet
- Electronics Soalan Measurement MySkills Akhir 2011Document14 pagesElectronics Soalan Measurement MySkills Akhir 2011Afdzam AzuraNo ratings yet
- Ucn 5801aDocument12 pagesUcn 5801aAhmad Kadafi HusinNo ratings yet
- Adc0801 PDFDocument36 pagesAdc0801 PDFroi_sihombingNo ratings yet
- ADC0808Document15 pagesADC0808Ketan SalviNo ratings yet
- Honda Car Radio CQ-YH5070 - CQ-YH5071 - CQ-YH5072 - CQ-YH5074 Service ManualDocument30 pagesHonda Car Radio CQ-YH5070 - CQ-YH5071 - CQ-YH5072 - CQ-YH5074 Service ManualVlach FrantišekNo ratings yet
- Getting Precise With MSP430 Sigma-Delta ADC Peripherals: Vincent Chan MSP430 Business Development Manager TI AsiaDocument33 pagesGetting Precise With MSP430 Sigma-Delta ADC Peripherals: Vincent Chan MSP430 Business Development Manager TI AsiaStefanGLNo ratings yet
- LCD-TFT CLAA170EA-07Document21 pagesLCD-TFT CLAA170EA-07m_tOmNo ratings yet
- Esquemas KONE 2009 PDFDocument35 pagesEsquemas KONE 2009 PDFkristerNo ratings yet
- General Purpose NPN Transistor Array Applications: FN483.6 Data Sheet December 15, 2011Document7 pagesGeneral Purpose NPN Transistor Array Applications: FN483.6 Data Sheet December 15, 2011Leidy Ferro100% (1)
- Semiconductor Technical DataDocument7 pagesSemiconductor Technical DataFelicia ChiewNo ratings yet
- Differential/Cascode Amplifier For Commercial and Industrial Equipment From DC To 120Mhz FeaturesDocument10 pagesDifferential/Cascode Amplifier For Commercial and Industrial Equipment From DC To 120Mhz FeaturessunantoNo ratings yet
- IRG4PC50S: Features Features Features Features FeaturesDocument8 pagesIRG4PC50S: Features Features Features Features FeaturesPerica RakićNo ratings yet
- Vishay Semiconductors: FeaturesDocument7 pagesVishay Semiconductors: FeaturesbhathiyaengNo ratings yet
- Distributed byDocument42 pagesDistributed bydennyjoelNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to DisplaysNo ratings yet
- Stepping Motor ControlDocument13 pagesStepping Motor ControlyumnabilalNo ratings yet
- Keyboard InterfaceDocument3 pagesKeyboard InterfaceyumnabilalNo ratings yet
- DOSBOX TutorialDocument7 pagesDOSBOX TutorialyumnabilalNo ratings yet
- Segmentation of MR Images of Brain: Digital Image ProcessingDocument15 pagesSegmentation of MR Images of Brain: Digital Image ProcessingyumnabilalNo ratings yet
- MT6735M Android EMMC ScatterDocument7 pagesMT6735M Android EMMC ScatterAnonymous 9Lf5wsnx00% (1)
- PC-EI-MS-05 Instrument Calibration PDFDocument11 pagesPC-EI-MS-05 Instrument Calibration PDFahmed011No ratings yet
- RZ Electro Surgical G400Document7 pagesRZ Electro Surgical G400sigmakarsaNo ratings yet
- AN2450-L6599 Application Note PDFDocument32 pagesAN2450-L6599 Application Note PDF양영주No ratings yet
- SCSI InterfaceDocument10 pagesSCSI InterfaceApol MaañoNo ratings yet
- MEC5035-NZW Spec1Document541 pagesMEC5035-NZW Spec1wazawofav67% (3)
- Katalog Haupa StopiceDocument68 pagesKatalog Haupa StopiceRazvan TeleanuNo ratings yet
- U340 441E DescriptionDocument25 pagesU340 441E Descriptionruslan1580100% (1)
- PC123 Series: DIP 4pin Reinforced Insulation Type PhotocouplerDocument16 pagesPC123 Series: DIP 4pin Reinforced Insulation Type PhotocouplerwilltorNo ratings yet
- FTIRDocument19 pagesFTIRvsnmurthy10% (1)
- Escuela Politécnica Nacional: Electrical Engineering Department Electric Machines IDocument29 pagesEscuela Politécnica Nacional: Electrical Engineering Department Electric Machines IDari Xavi ToapantaNo ratings yet
- Model LS8800: Product Technical Data SheetDocument2 pagesModel LS8800: Product Technical Data SheetHanne WilzaNo ratings yet
- YLR-U Series DatasheetDocument2 pagesYLR-U Series DatasheetAliali MohamedNo ratings yet
- Superheterodyne Radio ReceiverDocument16 pagesSuperheterodyne Radio ReceiverTuanNo ratings yet
- DH67GD DH67BL TechProdSpecDocument92 pagesDH67GD DH67BL TechProdSpecjagan2003No ratings yet
- RTD ThermistorDocument20 pagesRTD ThermistorGeethakshayaNo ratings yet
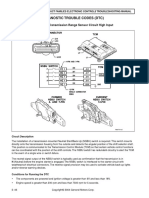
- Diagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High InputDocument4 pagesDiagnostic Trouble Codes (DTC) : DTC P0708 Transmission Range Sensor Circuit High Inputluis eduardo corzo enriquezNo ratings yet
- ICS-II Technician ManualDocument25 pagesICS-II Technician Manualn8rld4879No ratings yet
- TR-7570 Winding Temperature IndicatorManual PDFDocument30 pagesTR-7570 Winding Temperature IndicatorManual PDFkiran100% (5)
- 6.0L Engine Removal PDFDocument10 pages6.0L Engine Removal PDFFEF777100% (1)
- DeltaV PDS S-Series Traditional IODocument34 pagesDeltaV PDS S-Series Traditional IOJosé Carlos Batista SilvaNo ratings yet
- Nuvola 2000Document16 pagesNuvola 2000Andy PascaliNo ratings yet
- FTDX3000 en PDFDocument140 pagesFTDX3000 en PDFAnonymous zjqvkDENo ratings yet
- Analog Electronics: Op-Amp Circuits and Active FiltersDocument43 pagesAnalog Electronics: Op-Amp Circuits and Active FiltersSin SideNo ratings yet
- YUYANGKING Controller User Manual Bluetooth VersionDocument8 pagesYUYANGKING Controller User Manual Bluetooth VersionMuhd Fitri Mohd JumatNo ratings yet
- Mammography Machine (Part 2)Document4 pagesMammography Machine (Part 2)Kyla LotaNo ratings yet
- Intel® PRO/Wireless 2200BG GuideDocument2 pagesIntel® PRO/Wireless 2200BG Guidelethe100% (1)