Download as pdf or txt
You might also like
- Grade 9 English Home Language Task 5 June Exam ModeratedDocument19 pagesGrade 9 English Home Language Task 5 June Exam Moderated18118100% (5)
- Understanding Culture, Society and Politics: Quarter 1 - Module 3: Cultural Relativism and EthnocentrismDocument26 pagesUnderstanding Culture, Society and Politics: Quarter 1 - Module 3: Cultural Relativism and EthnocentrismDERICK REBAY86% (43)
- Horizontal Axis Water Turbine: Generation and Optimization of Green EnergyDocument6 pagesHorizontal Axis Water Turbine: Generation and Optimization of Green Energynitin maratheNo ratings yet
- Jurnal Teknologi: An Innovative Vertical Axis Current Turbine Design For Low Current SpeedDocument6 pagesJurnal Teknologi: An Innovative Vertical Axis Current Turbine Design For Low Current SpeedDuzzysNo ratings yet
- 10.1007@s40722 020 00176 6Document19 pages10.1007@s40722 020 00176 6Omer Ghassan Abdulkareem Hassan AlsultanNo ratings yet
- Twisted TurbineDocument14 pagesTwisted TurbineTheodore Teddy JNo ratings yet
- 2011 - Golecha-Influence of The Deflector Plate On The Performance of Modified SavoniusDocument11 pages2011 - Golecha-Influence of The Deflector Plate On The Performance of Modified SavoniusmNo ratings yet
- Performance Enhancements On Vertical Axis Wind Turbines Using Flow Augmentation Systems A Review 2017 Renewable and Sustainable Energy ReviewsDocument18 pagesPerformance Enhancements On Vertical Axis Wind Turbines Using Flow Augmentation Systems A Review 2017 Renewable and Sustainable Energy ReviewsCleyson GomesNo ratings yet
- 1 s2.0 S0029801821000226 MainDocument21 pages1 s2.0 S0029801821000226 MainDuc Minh BanhNo ratings yet
- Performance VATfor Tidal CurrentDocument12 pagesPerformance VATfor Tidal CurrentBattle SagaNo ratings yet
- Design & Analysis of Rotor Which Produce The ElectricityDocument5 pagesDesign & Analysis of Rotor Which Produce The ElectricityAbdul Mutaal DNo ratings yet
- Kailash 2012Document13 pagesKailash 2012ahmad halim sidiqNo ratings yet
- 2012-Golecha-Performance Study of Modified Savonius Water Turbine WithDocument13 pages2012-Golecha-Performance Study of Modified Savonius Water Turbine WithmNo ratings yet
- Renewable Energy: Paresh Halder, Abdus Samad, Dominique TH EveninDocument13 pagesRenewable Energy: Paresh Halder, Abdus Samad, Dominique TH EveninAlmir RodriguesNo ratings yet
- Design of Zero Head Turbines For Power GenerationDocument29 pagesDesign of Zero Head Turbines For Power GenerationUsman KhanNo ratings yet
- Renewable Energy: Katsutoshi Shirasawa, Kohei Tokunaga, Hidetsugu Iwashita, Tsumoru ShintakeDocument7 pagesRenewable Energy: Katsutoshi Shirasawa, Kohei Tokunaga, Hidetsugu Iwashita, Tsumoru ShintakeBulelat Orozco SagunNo ratings yet
- Ikhwan 2022 IOP Conf. Ser. Earth Environ. Sci. 1081 012045Document11 pagesIkhwan 2022 IOP Conf. Ser. Earth Environ. Sci. 1081 012045Farid NugrohoNo ratings yet
- Irjet V8i4889Document4 pagesIrjet V8i4889d v rama krishnaNo ratings yet
- 1 s2.0 S0029801822007223 MainDocument12 pages1 s2.0 S0029801822007223 MainVinicius dos Santos MirandaNo ratings yet
- Design and Fabrication of Savonius VertiDocument8 pagesDesign and Fabrication of Savonius VertiAdibo FostinNo ratings yet
- Energy Reports: Sahishnu R. Shah, Rakesh Kumar, Kaamran Raahemifar, Alan S. FungDocument5 pagesEnergy Reports: Sahishnu R. Shah, Rakesh Kumar, Kaamran Raahemifar, Alan S. FungJuan ApzNo ratings yet
- Design and Manufacturing of Bulb Turbine: Tadake Harshal Sahebrao Visave Jaydev MurlidharDocument4 pagesDesign and Manufacturing of Bulb Turbine: Tadake Harshal Sahebrao Visave Jaydev MurlidharЖивотаЛазаревићNo ratings yet
- Savonius Wind TurbinesDocument8 pagesSavonius Wind Turbinesnovanalfaridzi063No ratings yet
- A Comparison of Extreme Structural Responses andDocument39 pagesA Comparison of Extreme Structural Responses andWinggi ArfaNo ratings yet
- Mohhartonoscopusq4Document6 pagesMohhartonoscopusq4Muluken TemesgenNo ratings yet
- Wind TurbineDocument4 pagesWind TurbinesoroushNo ratings yet
- FM2 ReportDocument14 pagesFM2 ReportNasreen ClothNo ratings yet
- NJKNKNDocument9 pagesNJKNKNdaffa islamiNo ratings yet
- Water 15 02312Document18 pagesWater 15 02312RIZAL MUXNo ratings yet
- Dynamic Analysis of A Braceless Semisubmersible Offshore Wind Turbine in Operational ConditionsDocument9 pagesDynamic Analysis of A Braceless Semisubmersible Offshore Wind Turbine in Operational ConditionsVũ Quý HoàNo ratings yet
- Energy: A.S. Bahaj, L.E. MyersDocument12 pagesEnergy: A.S. Bahaj, L.E. Myerssebastian agudeloNo ratings yet
- Practical Tidal Turbine Design Considerations A ReDocument20 pagesPractical Tidal Turbine Design Considerations A ReSthefanoNo ratings yet
- Research Article: Aerodynamic Shape Optimization of A Vertical-Axis Wind Turbine Using Differential EvolutionDocument17 pagesResearch Article: Aerodynamic Shape Optimization of A Vertical-Axis Wind Turbine Using Differential EvolutionFAZAL ELLAHINo ratings yet
- 2017-Design Enhancement of An Oscillating Water ColumnDocument8 pages2017-Design Enhancement of An Oscillating Water ColumnUmer MajeedNo ratings yet
- IJCRT2210185Document5 pagesIJCRT2210185arainshoaib6671No ratings yet
- Pelton Turbine Journal 2Document9 pagesPelton Turbine Journal 2Surjit DuttaNo ratings yet
- Performance of Horizontal Axis Tidal Current Turbine by Blade ConfigurationDocument12 pagesPerformance of Horizontal Axis Tidal Current Turbine by Blade ConfigurationAyman ZarefyNo ratings yet
- 1 s2.0 S0960148120312982 MainDocument11 pages1 s2.0 S0960148120312982 MainKaanNo ratings yet
- Water: Performance Improvement of A Drag Hydrokinetic TurbineDocument23 pagesWater: Performance Improvement of A Drag Hydrokinetic TurbineXingxing HuangNo ratings yet
- CFD Simulations To Optimize The Blade Design of Water WheelsDocument6 pagesCFD Simulations To Optimize The Blade Design of Water WheelsRahmad Hidayat BoliNo ratings yet
- Experimental Study On The Hydrodynamic Performance of An Oscillating Water Column With Frontal PlatesDocument10 pagesExperimental Study On The Hydrodynamic Performance of An Oscillating Water Column With Frontal PlatesjackiemaddyNo ratings yet
- 1 s2.0 S0029801822013014 MainDocument13 pages1 s2.0 S0029801822013014 MainwobblyseamNo ratings yet
- Application of Marine Control and Monitoring Systems: Dafny &Document4 pagesApplication of Marine Control and Monitoring Systems: Dafny &TJPRC PublicationsNo ratings yet
- ++++jahani, K. Et Al. (2022) Structural Dynamics of Offshore Wind Turbines - A ReviewDocument17 pages++++jahani, K. Et Al. (2022) Structural Dynamics of Offshore Wind Turbines - A ReviewMarcus Girão de MoraisNo ratings yet
- Renewable Energy: Guanghui Bai, Jun Li, Pengfei Fan, Guojun LiDocument7 pagesRenewable Energy: Guanghui Bai, Jun Li, Pengfei Fan, Guojun LiNasteho DjamaNo ratings yet
- 1 s2.0 S0029801823030020 MainDocument18 pages1 s2.0 S0029801823030020 Main4si21cv008No ratings yet
- Improvement of Hydro Kinetic Diffuser Augmented Power TurbineDocument29 pagesImprovement of Hydro Kinetic Diffuser Augmented Power TurbinecresjohnNo ratings yet
- Rithwik PDFDocument13 pagesRithwik PDFRithwik RanjanNo ratings yet
- Prasad 2018Document7 pagesPrasad 2018Fernando Andrés Durán DonosoNo ratings yet
- 113 - Parametric Study and Performance Analysis of A Swinging Sail Wind MachineDocument21 pages113 - Parametric Study and Performance Analysis of A Swinging Sail Wind MachineMayra ZezattiNo ratings yet
- A Comparison of Computational and Experimental Results of Wells Turbine Performance For Wave Energy Conversion - Artigo - Taha PDFDocument8 pagesA Comparison of Computational and Experimental Results of Wells Turbine Performance For Wave Energy Conversion - Artigo - Taha PDFAdson Santos Silva Jr.No ratings yet
- Accepted Manuscript Not Copyedited: The Effect of Mid-Plane Guide Vanes in A Biplane Wells TurbineDocument43 pagesAccepted Manuscript Not Copyedited: The Effect of Mid-Plane Guide Vanes in A Biplane Wells TurbineRobin WilliamsNo ratings yet
- Dynamic Response Analysis of Jacket Platform Integrated With Oscillating Water Column DeviceDocument12 pagesDynamic Response Analysis of Jacket Platform Integrated With Oscillating Water Column DeviceSthefanoNo ratings yet
- Two-Way Counter-Rotating Axial Flow Pump TurbineDocument13 pagesTwo-Way Counter-Rotating Axial Flow Pump TurbineclaudehackerNo ratings yet
- Ocean Engineering: ReviewDocument23 pagesOcean Engineering: ReviewAlmir RodriguesNo ratings yet
- Design Fabrication Analysis of A Gravitational Water Vortex Based Energy HarvesterDocument13 pagesDesign Fabrication Analysis of A Gravitational Water Vortex Based Energy HarvesterDoomed DarwinNo ratings yet
- Zhou 2023 J. Phys. Conf. Ser. 2584 012045Document10 pagesZhou 2023 J. Phys. Conf. Ser. 2584 012045I Made Widhi SuryawanNo ratings yet
- An Investigation of The Effects of Wind-Induced Inclination On Floating Wind Turbine Dynamics - Heave Plate ExcursionDocument10 pagesAn Investigation of The Effects of Wind-Induced Inclination On Floating Wind Turbine Dynamics - Heave Plate ExcursionCarlos GarridoNo ratings yet
- Analisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasDocument10 pagesAnalisis de Diferentes Perfiles Nrel Riso Naca para HidroturbinasvictoriaNo ratings yet
- Numerical Study of Wake Characteristics in A Horizontal-Axis Hydrokinetic TurbineDocument16 pagesNumerical Study of Wake Characteristics in A Horizontal-Axis Hydrokinetic TurbineRaul KörralesNo ratings yet
- A Performance Study On A Direct Drive Hydro Turbine For Wave Energy ConverterDocument11 pagesA Performance Study On A Direct Drive Hydro Turbine For Wave Energy Convertervivaldi RNo ratings yet
- Computational #Uid Dynamics Simulations of #Uid #Ow and Heat Transfer at The Wall) Particle Contact Points in A "Xed-Bed ReactorDocument7 pagesComputational #Uid Dynamics Simulations of #Uid #Ow and Heat Transfer at The Wall) Particle Contact Points in A "Xed-Bed ReactorC M shashikumarNo ratings yet
- The S-Rotor and Its Applications, Savonius 1931Document6 pagesThe S-Rotor and Its Applications, Savonius 1931C M shashikumarNo ratings yet
- A Method ForDocument9 pagesA Method ForC M shashikumarNo ratings yet
- Development and Assessment of A Blade Element Momentum Theory Model For High Solidity Vertical Axis Tidal TurbinesDocument17 pagesDevelopment and Assessment of A Blade Element Momentum Theory Model For High Solidity Vertical Axis Tidal TurbinesC M shashikumarNo ratings yet
- A Computational Investigation To Analyze The Effects of Different Rotor Parameters On Hybrid Hydrokinetic Turbine PerformanceDocument17 pagesA Computational Investigation To Analyze The Effects of Different Rotor Parameters On Hybrid Hydrokinetic Turbine PerformanceC M shashikumarNo ratings yet
- Development and Numerical Performance Analysis of A Pump Directly Driven by A Hydrokinetic TurbineDocument20 pagesDevelopment and Numerical Performance Analysis of A Pump Directly Driven by A Hydrokinetic TurbineC M shashikumarNo ratings yet
- Experimental and Multiphase Modeling of Small Vertical Axis Hydrokinetic Turbine With Free Surface VariationsDocument14 pagesExperimental and Multiphase Modeling of Small Vertical Axis Hydrokinetic Turbine With Free Surface VariationsC M shashikumarNo ratings yet
- Republic vs. Castelvi, 58 SCRA 336 (1974)Document4 pagesRepublic vs. Castelvi, 58 SCRA 336 (1974)Gabriel HernandezNo ratings yet
- Legal TranslationDocument29 pagesLegal TranslationPak Cheong LeungNo ratings yet
- 1 STCW OverviewDocument19 pages1 STCW OverviewJosh SebastianNo ratings yet
- EiE Competency Framework CPHA Annex enDocument25 pagesEiE Competency Framework CPHA Annex enCumar Cadaani100% (1)
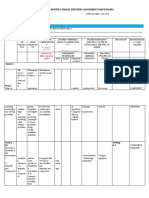
- Classroom Instructional Delivery Alignment Map For JHS: Refer To The Melc Given by DepedDocument5 pagesClassroom Instructional Delivery Alignment Map For JHS: Refer To The Melc Given by DepedQueenie GamboaNo ratings yet
- ApplicationDocument3 pagesApplicationAllen AntolinNo ratings yet
- Alcoholics Anonymous PDFDocument14 pagesAlcoholics Anonymous PDFDeroy GarryNo ratings yet
- Leonard Peltier Open Letter - Feb. 6, 2024Document3 pagesLeonard Peltier Open Letter - Feb. 6, 2024jen_benderyNo ratings yet
- Avernment of Jurisdiction Quo WarrantoDocument7 pagesAvernment of Jurisdiction Quo WarrantoBilal Yusef El Abdullah BeyNo ratings yet
- Practical Research 2 2021Document36 pagesPractical Research 2 2021Allen Paul Gamazon0% (1)
- Lesson 4: Water SafetyDocument12 pagesLesson 4: Water SafetyHelena FarroNo ratings yet
- ManualDocument6 pagesManualCleber SouzaNo ratings yet
- Sepak TakrawDocument39 pagesSepak TakrawRandy Gasalao100% (2)
- I Love You ManDocument17 pagesI Love You ManАнна Гарагуля ПС-20-1No ratings yet
- Firms and Managerial ObjectivesDocument33 pagesFirms and Managerial ObjectiveshemantbaidNo ratings yet
- A. Karel Velan (Auth.) The Multi-Universe Cosmos - The First Complete Story of The Origin of The Universe 1992Document368 pagesA. Karel Velan (Auth.) The Multi-Universe Cosmos - The First Complete Story of The Origin of The Universe 1992dsudiptaNo ratings yet
- Guide JCT 2005 Design Built Rev 2009Document44 pagesGuide JCT 2005 Design Built Rev 2009seanbeagNo ratings yet
- Kesadahan AirDocument7 pagesKesadahan Airmuhamad.badar9285No ratings yet
- Love Languages Mystery GameDocument3 pagesLove Languages Mystery GamePittipat Manzano ChupungcoNo ratings yet
- AUTHORITY TO SELL - Literal - 10022023Document3 pagesAUTHORITY TO SELL - Literal - 10022023MICHAEL SALINASNo ratings yet
- 5 Brilliant Depictions of Lucifer in Art From The Past 250 YearsDocument1 page5 Brilliant Depictions of Lucifer in Art From The Past 250 Yearsrserrano188364No ratings yet
- Case Session - 8Document4 pagesCase Session - 8Shinas AhmmedNo ratings yet
- 12 Siochi Vs GozonDocument10 pages12 Siochi Vs GozonPaolo CruzNo ratings yet
- Package Contents Instruction Installation / Technical SupportDocument1 pagePackage Contents Instruction Installation / Technical SupportXseed02No ratings yet
- Flusser - Crisis of LinearityDocument12 pagesFlusser - Crisis of LinearitynatelbNo ratings yet
- Vision: Course Number Description: Effectivity: Date Revised Page 1 of 9Document9 pagesVision: Course Number Description: Effectivity: Date Revised Page 1 of 9Anonymous tyEGT2RJJUNo ratings yet
- Welcome To Anderson Workone. Your Career Starts HereDocument28 pagesWelcome To Anderson Workone. Your Career Starts HereHilary TerryNo ratings yet
- Folding Standards: GeneralDocument9 pagesFolding Standards: GeneralNaadiyah JauharaNo ratings yet