Download as pdf or txt
You might also like
- EEC 117 Computer Hardware 1Document100 pagesEEC 117 Computer Hardware 1Kalu Samuel100% (10)
- Project On Honeywell TDC3000 DcsDocument77 pagesProject On Honeywell TDC3000 DcsAbv Sai75% (4)
- Electronic Space Division SwitchingDocument8 pagesElectronic Space Division SwitchingKARTHIKNo ratings yet
- SPC ExchanceDocument12 pagesSPC ExchanceCis MarkNo ratings yet
- Telecom Switching System and NetworksDocument91 pagesTelecom Switching System and Networksbharat09No ratings yet
- Lecture 2Document58 pagesLecture 2ZelalemNo ratings yet
- Electronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryDocument8 pagesElectronic Space Division Switching: Networks-Dstn-By-Ramya-Ranjan-ChoudhuryKARTHIKNo ratings yet
- Control of Switching Systems Unit 4Document17 pagesControl of Switching Systems Unit 4kishor3081No ratings yet
- SPC WikipediaDocument3 pagesSPC WikipediaJanak GoswamiNo ratings yet
- Distributed SPCDocument106 pagesDistributed SPCKamal Singh RathoreNo ratings yet
- Stored Program ControlDocument2 pagesStored Program ControlJanuvasanth VJNo ratings yet
- Unit IDocument25 pagesUnit ISwastikNo ratings yet
- Sdic 2marks (Q & A) (Unit 4)Document3 pagesSdic 2marks (Q & A) (Unit 4)Ganapathy RamadossNo ratings yet
- Stored Program ControlDocument2 pagesStored Program ControlTiffany Price100% (1)
- A Generic Dss Model: Unit 8Document39 pagesA Generic Dss Model: Unit 8Deepa ShreeNo ratings yet
- ETE423 EEE423 - Lecture 4 - SPCDocument30 pagesETE423 EEE423 - Lecture 4 - SPCShadman Rahman 1815396660No ratings yet
- Unit - 8 A Generic Digital Switching System ModelDocument16 pagesUnit - 8 A Generic Digital Switching System ModelLavanya R GowdaNo ratings yet
- Control Unit OrganizationDocument5 pagesControl Unit OrganizationAniket SrivastavaNo ratings yet
- Athar File111Document35 pagesAthar File111atharNo ratings yet
- Embedded System Unit 5Document22 pagesEmbedded System Unit 5BalaNo ratings yet
- CO2: 1. Concept of Program Execution/InterpretationDocument22 pagesCO2: 1. Concept of Program Execution/InterpretationYasmeen SyedNo ratings yet
- Ajusan-ECE-21 Midterm Exam123Document4 pagesAjusan-ECE-21 Midterm Exam123Chetah TegnNo ratings yet
- PLC Teaching BookDocument167 pagesPLC Teaching BookMitchell Daniels100% (4)
- Teaching PLC Chap1Document38 pagesTeaching PLC Chap1mhafizanNo ratings yet
- PLC QuestionsDocument17 pagesPLC QuestionsbahyNo ratings yet
- LDCS Part-ADocument24 pagesLDCS Part-ASantosh Vishnu100% (1)
- Basic Principles of Electronic ExchangesDocument12 pagesBasic Principles of Electronic ExchangesAryamn ProstNo ratings yet
- T&SS Lecture-6Document41 pagesT&SS Lecture-6sarim imranNo ratings yet
- Definition and Components of Interface Classification of Data Transfer SchemesDocument38 pagesDefinition and Components of Interface Classification of Data Transfer SchemesmbmramosNo ratings yet
- Psoc Notes PDFDocument61 pagesPsoc Notes PDFanon_613151744100% (2)
- Interfacing Techniques Topic 4Document23 pagesInterfacing Techniques Topic 4Jovel Jhon OpianaNo ratings yet
- Chapter 5Document23 pagesChapter 5aliyiNo ratings yet
- DSS Unit - 6 NotesDocument15 pagesDSS Unit - 6 NotesLavanya R GowdaNo ratings yet
- Principle of Electronic ChangeDocument10 pagesPrinciple of Electronic Changeveeru_virender100% (2)
- Chp6 Interrupt - StacknewDocument11 pagesChp6 Interrupt - Stacknewheyfiez12No ratings yet
- Computer System Architecture MCA - 301Document10 pagesComputer System Architecture MCA - 301Mangesh MalvankarNo ratings yet
- Cigre CPFL EspecificacaoMonitoracaoOnline 2007 IngDocument8 pagesCigre CPFL EspecificacaoMonitoracaoOnline 2007 IngjasonNo ratings yet
- Ee415 LT 1Document19 pagesEe415 LT 1ehero33gNo ratings yet
- ALU, Data Path and Control UnitDocument24 pagesALU, Data Path and Control UnitTanisha Jauhari 21BCE3566No ratings yet
- COA Chapter 6Document6 pagesCOA Chapter 6Abebe GosuNo ratings yet
- Arm LPC2148 MaterialDocument17 pagesArm LPC2148 Material1000kvNo ratings yet
- AyilaraDocument13 pagesAyilaraAremu FaisalNo ratings yet
- PLC Technical DefinitionDocument6 pagesPLC Technical DefinitionKyle EmersonNo ratings yet
- Chapter 4 FinalDocument11 pagesChapter 4 Finalmuhaba muhamedNo ratings yet
- Os Ut1 QaDocument7 pagesOs Ut1 QaVignesh RaghavareddyNo ratings yet
- Unit 4Document42 pagesUnit 4Davda NishitNo ratings yet
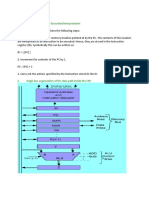
- Computer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A ProcessorDocument8 pagesComputer Architecture: 1. Draw A Diagram Single Bus Organization of The Data Path Inside A Processormd sayemNo ratings yet
- Programmable Logic ControllerDocument28 pagesProgrammable Logic ControllerMOHAMMED RAHEELNo ratings yet
- Unit 6Document31 pagesUnit 6Apurva JarwalNo ratings yet
- Application of SCADA in PSDocument5 pagesApplication of SCADA in PSupparahalNo ratings yet
- Presentation 3Document14 pagesPresentation 3Md SowrovNo ratings yet
- Programmable Logic ControllerDocument25 pagesProgrammable Logic Controllermanoj4sivaNo ratings yet
- CA MaterialDocument109 pagesCA MaterialVinay ViratNo ratings yet
- IA Lab Experiments AllDocument47 pagesIA Lab Experiments Allraj251003No ratings yet
- Control Systems: Piu Ghosh Instrumentation and Control DepartmentDocument42 pagesControl Systems: Piu Ghosh Instrumentation and Control Departmentpiu_ghosh9966100% (1)
- Distributed Control Systems: Process Control in The Chemical IndustriesDocument14 pagesDistributed Control Systems: Process Control in The Chemical IndustriesAhmad HamoudaNo ratings yet
- Honeywell Dcs ArchitectureDocument14 pagesHoneywell Dcs ArchitectureVanama MalaiNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedFrom EverandOperating Systems Interview Questions You'll Most Likely Be AskedNo ratings yet
- SWIN Chapter 4 TRAFFIC ENGINEERINGDocument17 pagesSWIN Chapter 4 TRAFFIC ENGINEERINGMagarsaa Qana'iiNo ratings yet
- Chapter 4Document34 pagesChapter 4Magarsaa Qana'iiNo ratings yet
- Chapter Two: Creation of New VenturesDocument44 pagesChapter Two: Creation of New VenturesMagarsaa Qana'iiNo ratings yet
- Chap 3Document45 pagesChap 3Magarsaa Qana'iiNo ratings yet
- Switching and Intelligence Networks: Chapter-1Document25 pagesSwitching and Intelligence Networks: Chapter-1Magarsaa Qana'iiNo ratings yet
- SWIN Chapter 2 (2023)Document28 pagesSWIN Chapter 2 (2023)Magarsaa Qana'iiNo ratings yet
- Chapter Eight (Cables)Document40 pagesChapter Eight (Cables)Magarsaa Qana'iiNo ratings yet
- Chapter-2 Problems and SolutionDocument21 pagesChapter-2 Problems and SolutionMagarsaa Qana'iiNo ratings yet
- Chapter 1 and 2Document77 pagesChapter 1 and 2Magarsaa Qana'ii100% (1)
- JUNE, 2018 Jimma, EthiopiaDocument47 pagesJUNE, 2018 Jimma, EthiopiaMagarsaa Qana'iiNo ratings yet
- Chapter TwoDocument23 pagesChapter TwoMagarsaa Qana'iiNo ratings yet
- Internship Report and Project at ETDocument61 pagesInternship Report and Project at ETMagarsaa Qana'ii50% (2)
- Research Paper 5Document31 pagesResearch Paper 5Magarsaa Qana'iiNo ratings yet
- Chapter FOUR (Mechanical Design of TX)Document49 pagesChapter FOUR (Mechanical Design of TX)Magarsaa Qana'iiNo ratings yet
- Research Paper1Document52 pagesResearch Paper1Magarsaa Qana'iiNo ratings yet
- UntitledDocument46 pagesUntitledMagarsaa Qana'iiNo ratings yet
- Digital Signal Processing (Eceg3151) Iii Year Ii Semester Points: 20 Department: Ece Group Assignment Submission Date: 28 May 2021Document1 pageDigital Signal Processing (Eceg3151) Iii Year Ii Semester Points: 20 Department: Ece Group Assignment Submission Date: 28 May 2021Magarsaa Qana'iiNo ratings yet
- Chapter Six Corona)Document29 pagesChapter Six Corona)Magarsaa Qana'iiNo ratings yet
- Chapter Seven (Insulators)Document33 pagesChapter Seven (Insulators)Magarsaa Qana'iiNo ratings yet
- Research Paper 4Document52 pagesResearch Paper 4Magarsaa Qana'iiNo ratings yet
- DSPchapter 2Document15 pagesDSPchapter 2Magarsaa Qana'iiNo ratings yet
- Course OutlineDocument2 pagesCourse OutlineMagarsaa Qana'iiNo ratings yet
- Ch2 - Lec2 - Instruction Sets CharacteristicsDocument48 pagesCh2 - Lec2 - Instruction Sets CharacteristicsMagarsaa Qana'iiNo ratings yet
- Mettu - Interniship ReportDocument80 pagesMettu - Interniship ReportMagarsaa Qana'iiNo ratings yet
- Samara University College of Engineering and Technology Department of Electrical and Computer EngineeringDocument1 pageSamara University College of Engineering and Technology Department of Electrical and Computer EngineeringMagarsaa Qana'iiNo ratings yet
- Ch2 Lec3 RegitersDocument18 pagesCh2 Lec3 RegitersMagarsaa Qana'iiNo ratings yet
- UntitledDocument2 pagesUntitledMagarsaa Qana'iiNo ratings yet
- Java Chapter OneDocument88 pagesJava Chapter OneMagarsaa Qana'iiNo ratings yet
- Oops Chapter 4Document29 pagesOops Chapter 4Magarsaa Qana'iiNo ratings yet
- Loop ConceptsDocument7 pagesLoop ConceptsMagarsaa Qana'iiNo ratings yet
- 10 - Serie 63 SolenoideDocument2 pages10 - Serie 63 SolenoideoscarNo ratings yet
- Clarion Dxz838rmpDocument28 pagesClarion Dxz838rmpPaul TuckerNo ratings yet
- Falcon 222 E3 - Parts Catalogue (V6256706) On 27 Aug 13Document346 pagesFalcon 222 E3 - Parts Catalogue (V6256706) On 27 Aug 13diabalziab50% (4)
- Reference Mil-Aero Guide ConnectorDocument80 pagesReference Mil-Aero Guide ConnectorjamesclhNo ratings yet
- TB Wood's Form-FlexDocument34 pagesTB Wood's Form-FlexMonica SantosNo ratings yet
- Xamarin Forms SuccinctlyDocument127 pagesXamarin Forms SuccinctlyGodwin LarryNo ratings yet
- Quick Coupling Festo WTH SafetyDocument24 pagesQuick Coupling Festo WTH SafetyFaisal RifkiansyahNo ratings yet
- Hana Sps12 Red Hat Enterprise Linux RHEL 6 X Configuration Guide For SAP HANA enDocument42 pagesHana Sps12 Red Hat Enterprise Linux RHEL 6 X Configuration Guide For SAP HANA enjourney_00No ratings yet
- Q.2340164 - DO Denki Cablofil Kitas-RevDocument1 pageQ.2340164 - DO Denki Cablofil Kitas-RevHendrawan CwjNo ratings yet
- Slides For Chapter 1 Characterization of Distributed SystemsDocument9 pagesSlides For Chapter 1 Characterization of Distributed SystemsMasduki Khamdan MuchamadNo ratings yet
- PL/SQL User Defined Types Record and Table: Please Use Speaker Notes For Additional Information!Document15 pagesPL/SQL User Defined Types Record and Table: Please Use Speaker Notes For Additional Information!sekharmcpNo ratings yet
- Slyb 174 BDocument151 pagesSlyb 174 BelprofesorpanNo ratings yet
- Log20191221 190735Document2 pagesLog20191221 190735kolanNo ratings yet
- Akintunde Shefiu Oyeleye: Career ObjectiveDocument3 pagesAkintunde Shefiu Oyeleye: Career ObjectiveAkintunde Shefiu OyeleyeNo ratings yet
- SAMSUNG L83T Camera Service ManualDocument86 pagesSAMSUNG L83T Camera Service ManualJuan Pablo Urban SanchezNo ratings yet
- A Vision Module For Visually Impaired People by Using Raspberry Pi Platfrom PDFDocument4 pagesA Vision Module For Visually Impaired People by Using Raspberry Pi Platfrom PDFRbits TechnologiesNo ratings yet
- AN7148Document4 pagesAN7148Alejandro Borrego DominguezNo ratings yet
- Stepper Motor ControlDocument5 pagesStepper Motor ControlSahilNo ratings yet
- 5-Performance Evaluation of Virtual DesktopDocument6 pages5-Performance Evaluation of Virtual DesktopJOSE GABRIEL CORTAZAR OCAMPONo ratings yet
- Pressure Sensor ECT e ECT NATDocument1 pagePressure Sensor ECT e ECT NATNarvaxisNo ratings yet
- Vlsi Viva QuestionsDocument5 pagesVlsi Viva QuestionsSree HariNo ratings yet
- Fisher's Shop Table Saw Jigs Pt1 PlansDocument41 pagesFisher's Shop Table Saw Jigs Pt1 PlansAlex Reboulet100% (1)
- UFSBI InstallationDocument5 pagesUFSBI InstallationChandan KumarNo ratings yet
- LSC Clarity Operation ManualDocument155 pagesLSC Clarity Operation ManualPero TrifuljeskuNo ratings yet
- ECC Exam Online Proctoring Services User Guide 2019-V2Document43 pagesECC Exam Online Proctoring Services User Guide 2019-V2MR TECHYNo ratings yet
- Huawei E353 Data Card FAQDocument13 pagesHuawei E353 Data Card FAQvillasgNo ratings yet
- Auto Technology: Jl. Ahmad Yani No. 221-223 Kota Bandung, Jawa Barat 40112Document2 pagesAuto Technology: Jl. Ahmad Yani No. 221-223 Kota Bandung, Jawa Barat 40112bagus bagusNo ratings yet
- SmileBasic ManualDocument52 pagesSmileBasic ManualFuerro PerrezNo ratings yet
- 71hb34 AccessoriesDocument215 pages71hb34 AccessoriesGrigoroiu AlexandruNo ratings yet