Download as pdf or txt
You might also like
- Lexus - GS300 - GS430 - Service - Manual 8Document88 pagesLexus - GS300 - GS430 - Service - Manual 8seregap8477% (13)
- 002MCQDocument15 pages002MCQAhmed FarahatNo ratings yet
- 11 Dynarad Hf-110a Service Manual PDFDocument41 pages11 Dynarad Hf-110a Service Manual PDFkizen_586% (7)
- Power Converters Lab ManualDocument89 pagesPower Converters Lab ManualHari PrasadNo ratings yet
- Crown Pulse Series Service Documenation: Caution AvisDocument46 pagesCrown Pulse Series Service Documenation: Caution AvisComsa MariusNo ratings yet
- EE 410 EHV AC and DC TransmissionDocument1 pageEE 410 EHV AC and DC TransmissionshreyaNo ratings yet
- Symmetrical Fault in Power SystemDocument14 pagesSymmetrical Fault in Power Systemstudents answerNo ratings yet
- Indian Standard: Specification For Bushings For Alternating Voltages Above 1 000 VoltsDocument38 pagesIndian Standard: Specification For Bushings For Alternating Voltages Above 1 000 VoltsJainco Transmission LimitedNo ratings yet
- Electromechanical Over Voltage RelayDocument6 pagesElectromechanical Over Voltage RelayJatin AcharyaNo ratings yet
- Compute RLC ParameterDocument13 pagesCompute RLC ParameterAndigan SitompulNo ratings yet
- System Theory PDFDocument19 pagesSystem Theory PDFLakshmi Zahara0% (1)
- Buck BoostDocument7 pagesBuck Boostvivek5110% (1)
- PS 1 Unit Wise Imp Question-2 PDFDocument4 pagesPS 1 Unit Wise Imp Question-2 PDFPankaj KaleNo ratings yet
- Rotary and Linear Switched Reluctance MotorsDocument12 pagesRotary and Linear Switched Reluctance Motorskarthikeyan249100% (2)
- Ehv Ac & DC Unit 3&4 PDFDocument20 pagesEhv Ac & DC Unit 3&4 PDFAnubhav AggarwalNo ratings yet
- Objective Type Question For Adc/Dac: A. B. C. DDocument6 pagesObjective Type Question For Adc/Dac: A. B. C. DsuryaNo ratings yet
- Ee2151 Circuit TheoryDocument1 pageEe2151 Circuit Theoryjayachandranbalu50% (4)
- Model Terminal Guidelines Rev-01Document17 pagesModel Terminal Guidelines Rev-01vandematram27011987No ratings yet
- Mechanical Design of Overhead LinesDocument22 pagesMechanical Design of Overhead LinesTakawiraNo ratings yet
- Reactive Power Compensation Using Capacitor BanksDocument164 pagesReactive Power Compensation Using Capacitor BanksjujuNo ratings yet
- Expt 3 - EEM - Dielectric Strength of Liquid Insulating MaterialDocument6 pagesExpt 3 - EEM - Dielectric Strength of Liquid Insulating MaterialAvaniPujaraNo ratings yet
- AC MotorDocument3 pagesAC MotormadhumithaaNo ratings yet
- HVDC - FACTS Unit I Material SoftDocument17 pagesHVDC - FACTS Unit I Material SoftGokul M PNo ratings yet
- PS7008 Smart GridDocument2 pagesPS7008 Smart GridLakshmi Zahara100% (1)
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNo ratings yet
- Unit 2 Electromagnetic Relays (Switchgear and Protection)Document91 pagesUnit 2 Electromagnetic Relays (Switchgear and Protection)sujithNo ratings yet
- Cab Gurugram To Noida 23012023Document3 pagesCab Gurugram To Noida 23012023Deepak GuptaNo ratings yet
- IOT Based Deliberate Load Shedding Management System: Project Report OnDocument34 pagesIOT Based Deliberate Load Shedding Management System: Project Report OnAdhiraj KakatiNo ratings yet
- Eee-Viii-power System Operation and Control (06ee82) - NotesDocument138 pagesEee-Viii-power System Operation and Control (06ee82) - Noteskeerthanavijaya100% (3)
- MHD Power Generation Seminar ReportDocument29 pagesMHD Power Generation Seminar ReportHarsh JainNo ratings yet
- Data Logger For Photovoltaic Monitoring SystemDocument75 pagesData Logger For Photovoltaic Monitoring SystemLIEW HUI FANG UNIMAPNo ratings yet
- A Single-Phase Cascaded H-Bridge Multilevel Inverter With Reduced Switching Devices and HarmonicsDocument4 pagesA Single-Phase Cascaded H-Bridge Multilevel Inverter With Reduced Switching Devices and HarmonicsPratik DeokateNo ratings yet
- Abb Unitrol 6080 Excitation SystemDocument12 pagesAbb Unitrol 6080 Excitation SystemAmbujNo ratings yet
- Wire¤t Rating PDFDocument2 pagesWire¤t Rating PDFVIKRAM DESAI0% (1)
- GATE-2014 Electrical MeasurementsDocument42 pagesGATE-2014 Electrical MeasurementsRamaDinakaran100% (1)
- Wind DieselDocument21 pagesWind Dieselchandrahas aryan0% (2)
- Assignment 11 SolutionDocument8 pagesAssignment 11 Solutionsoumya sekhar mahantiNo ratings yet
- PV System Block DiagramDocument2 pagesPV System Block Diagramnirmal_inbox100% (2)
- ISO 841 en - Pdf-DesbloqueadoDocument8 pagesISO 841 en - Pdf-DesbloqueadoJosé Zegarra Calderón0% (1)
- GK Now Current AffairsDocument133 pagesGK Now Current Affairsviknesh waranNo ratings yet
- Luo ConverterDocument6 pagesLuo ConverterAndrei CocorNo ratings yet
- Summer Training Report 132 KV UPPCLDocument40 pagesSummer Training Report 132 KV UPPCLAadesh sharmaNo ratings yet
- Siemens Powerlinkip-DeDocument24 pagesSiemens Powerlinkip-Decesare.alcesteNo ratings yet
- Power System Dynamics Imp QuestionsDocument2 pagesPower System Dynamics Imp QuestionsUpendra Roy100% (1)
- EE PowerElectronicsAndPowerSystemsDocument88 pagesEE PowerElectronicsAndPowerSystemsBenitta MaryNo ratings yet
- ETE 22628 Question Bank-UT1: Sr. No. Option 1 Option 2 Option 3 Oprtion 4 Answer KeyDocument6 pagesETE 22628 Question Bank-UT1: Sr. No. Option 1 Option 2 Option 3 Oprtion 4 Answer KeyAditya Panvalkar APNo ratings yet
- Experiment No 4Document5 pagesExperiment No 4Kush GoyalNo ratings yet
- Implementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerDocument8 pagesImplementation of A Microcontroller Based 5 KVA Automatic Voltage StabilizerMawunyo100% (1)
- Unit V Design of Controllers For Drives: 3.1transfer Function For DC MotorDocument12 pagesUnit V Design of Controllers For Drives: 3.1transfer Function For DC Motormanoj kumarNo ratings yet
- DC Machines: Parts of DC MachineDocument51 pagesDC Machines: Parts of DC MachineKUMARNo ratings yet
- Overview of Methods For Voltage Sag Performance EstimationDocument5 pagesOverview of Methods For Voltage Sag Performance EstimationJay F. KuizonNo ratings yet
- Final Report (Akash)Document36 pagesFinal Report (Akash)Akash TaradaleNo ratings yet
- Basic Interview Questions About Power ElectronicsDocument21 pagesBasic Interview Questions About Power Electronicsrekha krishnanNo ratings yet
- Ps2113 Distributed Generation and Microgrid 2013 14Document2 pagesPs2113 Distributed Generation and Microgrid 2013 14Eric Hernandez0% (1)
- GTP, QAP & Drawing of InverterDocument66 pagesGTP, QAP & Drawing of InverterChandan ChakmaNo ratings yet
- Digital Control Engineering Model Question PaperDocument5 pagesDigital Control Engineering Model Question PaperCyril Robinson Azariah JohnNo ratings yet
- Anuj Seminar Final ReportDocument62 pagesAnuj Seminar Final ReportAnkit KumarNo ratings yet
- Transfix ManDocument49 pagesTransfix ManDiflcultyNo ratings yet
- SAS Specification For KPCLDocument34 pagesSAS Specification For KPCLMeghavahinaNo ratings yet
- Experiment 1 (A) : AIM: - Software & Hardware Used: - Assembly Language ProgramDocument22 pagesExperiment 1 (A) : AIM: - Software & Hardware Used: - Assembly Language ProgramAman SharmaNo ratings yet
- Experiment 1Document5 pagesExperiment 1Aayush Kumar SinghNo ratings yet
- Microprocessor and Microcontroller LaboratoryDocument70 pagesMicroprocessor and Microcontroller LaboratorythivyaprasadNo ratings yet
- EE8681 MPMC LabDocument56 pagesEE8681 MPMC LabThishya ChkNo ratings yet
- Service Manual: Video Camera RecorderDocument149 pagesService Manual: Video Camera RecorderJaap S.No ratings yet
- Multipurpose Cleaning RobotDocument5 pagesMultipurpose Cleaning RobotVISHAL ARAVINTH S S (RA2211047010024)No ratings yet
- 60V Two Terminal Constant Current Led Driver PowerdiDocument17 pages60V Two Terminal Constant Current Led Driver PowerdiJuan Vicente Hernandez LogytelNo ratings yet
- Experiment: 04 Name of The Experiment: No Load and Loading Characteristics of Three-Phase Alternator. ObjectivesDocument4 pagesExperiment: 04 Name of The Experiment: No Load and Loading Characteristics of Three-Phase Alternator. ObjectivesHaytham KenwayNo ratings yet
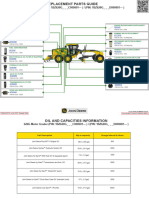
- 620G Motor Grader (PIN - 1BZ620G - C000001-) (PIN - 1BZ620G - D000001-) Replacement Parts GuideDocument5 pages620G Motor Grader (PIN - 1BZ620G - C000001-) (PIN - 1BZ620G - D000001-) Replacement Parts GuideFagner Pires de SáNo ratings yet
- Fiber Optic Infrastructure & Site Civil Works v-2Document14 pagesFiber Optic Infrastructure & Site Civil Works v-2api-3711176100% (3)
- Heater & A - C (A - C Kit) (Metal Housing) - S630Document3 pagesHeater & A - C (A - C Kit) (Metal Housing) - S630Romero JhonNo ratings yet
- 1999 General Catalog - Monitors - Pages 185-221Document37 pages1999 General Catalog - Monitors - Pages 185-221ericksgalaNo ratings yet
- Especificacion Bomba SelkoDocument4 pagesEspecificacion Bomba SelkoValentino EspinoNo ratings yet
- NCERT G7 BOC Physics CH 14 Electric Current and Its Effects 1Document6 pagesNCERT G7 BOC Physics CH 14 Electric Current and Its Effects 1Samrat SenNo ratings yet
- Sem VII MechatronicsDocument2 pagesSem VII MechatronicsPrajwal ShelkeNo ratings yet
- IRD1-T2: Transformer Differential Protection RelayDocument24 pagesIRD1-T2: Transformer Differential Protection RelayTaufiqtadNo ratings yet
- Growatt SPF SettingDocument11 pagesGrowatt SPF SettingAnddy PérezNo ratings yet
- Welcome... : An Electronic Solution That Puts The Pleasure Back Into Boating!Document71 pagesWelcome... : An Electronic Solution That Puts The Pleasure Back Into Boating!ensDan100% (1)
- Eleflow Mosfet CatalogDocument153 pagesEleflow Mosfet CatalogvicenteNo ratings yet
- Basic Components: CNC ControlsDocument34 pagesBasic Components: CNC ControlsShelton HodzieszNo ratings yet
- Switched Reluctance MotorDocument75 pagesSwitched Reluctance Motor15BEE1120 ISHAV SHARDANo ratings yet
- Unit 3 - Control Components in Hydraulic SystemDocument10 pagesUnit 3 - Control Components in Hydraulic SystemDagnachee TeguNo ratings yet
- 555 Timer ICDocument13 pages555 Timer ICmageNo ratings yet
- Hyster LPG ForkliftDocument7 pagesHyster LPG Forkliftncthanhck100% (1)
- SERT WorkbookDocument24 pagesSERT WorkbookSERTUSA100% (1)
- Hydraulic Pumps SiteDocument133 pagesHydraulic Pumps Siteeddy ortega100% (1)
- Master View KVM Switch: User ManualDocument19 pagesMaster View KVM Switch: User ManualMax Zamora R.No ratings yet
- CLA 2023 BrochureDocument75 pagesCLA 2023 BrochureGiovan Maria Catalan BelmonteNo ratings yet
- Spesifikasi AC 5PKDocument10 pagesSpesifikasi AC 5PKchandradisana9036No ratings yet
- ISZ8353 Accessory Range Bro EffMar14Document6 pagesISZ8353 Accessory Range Bro EffMar14Daddy PigNo ratings yet
- USB PinoutDocument5 pagesUSB Pinoutfearsgaryl3303No ratings yet