Download as pdf or txt
You might also like
- Cesab S110Document76 pagesCesab S110Z H100% (1)
- PROJECT - Techno-Commercial Analysis of Case Study of Electrical Auto-RickshawDocument41 pagesPROJECT - Techno-Commercial Analysis of Case Study of Electrical Auto-RickshawShubham AroraNo ratings yet
- Manual N400 - User Design PDFDocument157 pagesManual N400 - User Design PDFGAluffiNo ratings yet
- DR160S 2020Document98 pagesDR160S 2020Nelson Rodrigo100% (2)
- BYD ATTO 3 Owners Handbook 2022Document202 pagesBYD ATTO 3 Owners Handbook 2022Touch Bonna100% (2)
- Assembly-Power Distribution Center C7: Connector DetailsDocument4 pagesAssembly-Power Distribution Center C7: Connector DetailsEnrique Arevalo LeyvaNo ratings yet
- Jurnal Mitshubisi 17eDocument90 pagesJurnal Mitshubisi 17edwybagus20No ratings yet
- Vehicle Dynamics and Damping: First Revised EditionFrom EverandVehicle Dynamics and Damping: First Revised EditionRating: 4 out of 5 stars4/5 (2)
- Mitsubishi Technical Review 2005Document9 pagesMitsubishi Technical Review 2005miles100% (45)
- Vehicle Dynamics: R. Sai SandeepDocument12 pagesVehicle Dynamics: R. Sai SandeepRudra Sai SandeepNo ratings yet
- Mitsubishi Technical Review 2008Document10 pagesMitsubishi Technical Review 2008ron100% (33)
- Course Catalog - Garage One - Automobile & Engine DesignDocument6 pagesCourse Catalog - Garage One - Automobile & Engine DesignAmit SainiNo ratings yet
- Amz AutomotiveDocument38 pagesAmz AutomotiveSarthak SwainNo ratings yet
- Technical Review 2006Document156 pagesTechnical Review 2006Dwy Bagus NNo ratings yet
- Towards An All Wheel Drive Motorcycle DyDocument16 pagesTowards An All Wheel Drive Motorcycle DyYz ChenNo ratings yet
- AudiEvolve Documentation 2013Document362 pagesAudiEvolve Documentation 2013stephanieNo ratings yet
- Fyp-Hydraulic Brakes CompleteDocument32 pagesFyp-Hydraulic Brakes CompleteRishabh JainNo ratings yet
- Self Parking Capability in Daily Use Cars: Group MembersDocument26 pagesSelf Parking Capability in Daily Use Cars: Group MembersFahad RizwanNo ratings yet
- Siemens PLM LMS News Automotive Engineering MG Issue 29Document40 pagesSiemens PLM LMS News Automotive Engineering MG Issue 29S R E E N I V A S A R A 0No ratings yet
- Idiada Sim4u Workshop Motorsport 2010Document108 pagesIdiada Sim4u Workshop Motorsport 2010Cristi AntonNo ratings yet
- Effi CycleDocument7 pagesEffi CyclevinofonokNo ratings yet
- Report For Companies 3Document17 pagesReport For Companies 3Prateek VishwakarmaNo ratings yet
- Automotive EngieneeringDocument7 pagesAutomotive Engieneeringvlastimir cernosNo ratings yet
- A Report On Industrial Attachment at AIT DhobighatJ Suzuki Service Center by Saugat PhuyalDocument38 pagesA Report On Industrial Attachment at AIT DhobighatJ Suzuki Service Center by Saugat PhuyalGanesh PandeyNo ratings yet
- How Virtual Prototyping Accelerates Vehicle Development For Mission Zero PDFDocument8 pagesHow Virtual Prototyping Accelerates Vehicle Development For Mission Zero PDFSantosh SwainNo ratings yet
- Promotional Activity of Nissan CompanyDocument15 pagesPromotional Activity of Nissan CompanyShadman SakibNo ratings yet
- Studies On Performance Management System of Sona Group of Companies, Gurgaon, IndiaDocument6 pagesStudies On Performance Management System of Sona Group of Companies, Gurgaon, IndiaPravin ChoudharyNo ratings yet
- Improving Vehicle Handling Behaviour With Active Toe-ControlDocument100 pagesImproving Vehicle Handling Behaviour With Active Toe-ControlPCezzzNo ratings yet
- 2014 Enclave Detail BookDocument23 pages2014 Enclave Detail BookBecker Buick GmcNo ratings yet
- Project Draft CopymainDocument10 pagesProject Draft Copymainadas76333No ratings yet
- Vehicle Dynamics Factsheet CMADocument10 pagesVehicle Dynamics Factsheet CMAluyuanNo ratings yet
- Mitsubishi Technical Review 2004Document10 pagesMitsubishi Technical Review 2004marcel100% (62)
- 2.future CarsDocument14 pages2.future CarsawesomeyogeshwarNo ratings yet
- 70 Car 58 en WebDocument16 pages70 Car 58 en WebVagner AugustoNo ratings yet
- ANSYSDocument60 pagesANSYSDaniel Pérez Villalobos100% (1)
- Business PlanDocument10 pagesBusiness PlanAhmed AliNo ratings yet
- Report of SAEBAJA 2010Document4 pagesReport of SAEBAJA 2010adiNo ratings yet
- Innovation SpeechDocument4 pagesInnovation SpeechmaimsNo ratings yet
- Dynamic Analysis of Car Suspension Using ADAMSCarDocument10 pagesDynamic Analysis of Car Suspension Using ADAMSCarHussain TariqNo ratings yet
- World Class Motor MaintDocument3 pagesWorld Class Motor MaintIshmael WoolooNo ratings yet
- Final Report Advanced HudDocument70 pagesFinal Report Advanced Hudapi-646708752No ratings yet
- Toyota Case StudyDocument5 pagesToyota Case StudyNishadha21No ratings yet
- VI Grade Real Time Software Brochure ENDocument51 pagesVI Grade Real Time Software Brochure ENDanilo RojasNo ratings yet
- SIM TechnicalDocument VehicleDynamics Letter 012521Document3 pagesSIM TechnicalDocument VehicleDynamics Letter 012521siginanu14No ratings yet
- Presentation of OJT Undergone atDocument18 pagesPresentation of OJT Undergone atVinu ThomasNo ratings yet
- The Role of Quality Control in Automotive ManufacturingDocument9 pagesThe Role of Quality Control in Automotive ManufacturingVasant bhoknalNo ratings yet
- Kuutti 2019Document82 pagesKuutti 2019boucharebNo ratings yet
- Autonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingDocument31 pagesAutonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingGergely HornyakNo ratings yet
- Recent Trends in Automobile: Sachin ChouhanDocument23 pagesRecent Trends in Automobile: Sachin ChouhanMohd Javed IqbalNo ratings yet
- Construction and Evaluation of Continuously Variable Transmission On A Four-Stroke Engine SimulatorDocument11 pagesConstruction and Evaluation of Continuously Variable Transmission On A Four-Stroke Engine SimulatorPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Mid Term DefenseDocument27 pagesMid Term DefenseASHUTOSH ACHARYANo ratings yet
- 1ks18me008 InternshipDocument16 pages1ks18me008 InternshipPrasannaNo ratings yet
- Siemens PLM Infiniti Red Bull Racing Cs Z7Document4 pagesSiemens PLM Infiniti Red Bull Racing Cs Z7rasgeetsinghNo ratings yet
- Suspension Test-Rig Project ReportDocument22 pagesSuspension Test-Rig Project ReportMayur Madhukar MankarNo ratings yet
- Hyundai Mobis BrochureDocument18 pagesHyundai Mobis Brochurejai1779100% (1)
- Adaptive Robust Vehicle Motion Control For FutureDocument31 pagesAdaptive Robust Vehicle Motion Control For FutureaamirNo ratings yet
- Artificial Intelligence in AutomobileDocument12 pagesArtificial Intelligence in AutomobileLeon VargheseNo ratings yet
- Ride Comfort Using Bump Test RigDocument6 pagesRide Comfort Using Bump Test RigNEERAJ KUMARNo ratings yet
- Mechsonic Racing ProposalDocument18 pagesMechsonic Racing ProposalPawan TharejaNo ratings yet
- Summer Training Program Automotive Dynamics & Designing: Elite-Techno GroupsDocument7 pagesSummer Training Program Automotive Dynamics & Designing: Elite-Techno GroupsKali Kumar VardhineediNo ratings yet
- Brochure PT NVH 2014Document2 pagesBrochure PT NVH 2014rudey18No ratings yet
- Hazare Et Al-2015-Systems EngineeringDocument17 pagesHazare Et Al-2015-Systems EngineeringJúlio CortêsNo ratings yet
- LBYMREU Final Project DocumentationDocument7 pagesLBYMREU Final Project DocumentationAudrian Louven Realubit SabadoNo ratings yet
- Tute MDA - Control and DisplayDocument1 pageTute MDA - Control and Displaysunny bhatiaNo ratings yet
- GOKARNA DANDELI HyderabadDocument8 pagesGOKARNA DANDELI HyderabadSonu RathodNo ratings yet
- Fax PDFDocument29 pagesFax PDFMaiChiVuNo ratings yet
- Cat 120 SpecalogDocument4 pagesCat 120 SpecalogPutraNo ratings yet
- Inverted T-WALL ®: A New Solution From The Neel CompanyDocument3 pagesInverted T-WALL ®: A New Solution From The Neel CompanysamNo ratings yet
- Date: To: From: Subject: Implementation of Immediate Additional Cyclist Safety Measures AlongDocument6 pagesDate: To: From: Subject: Implementation of Immediate Additional Cyclist Safety Measures AlongChris GothnerNo ratings yet
- 40101527Document20 pages40101527ANIKET SHINDENo ratings yet
- DIWA in BRT Systems 2013Document3 pagesDIWA in BRT Systems 2013吳坤益No ratings yet
- Apprehension of Traffic ViolatorDocument6 pagesApprehension of Traffic ViolatorHerb BlancaNo ratings yet
- RW 1019Document109 pagesRW 1019Jerônimo RafaelNo ratings yet
- Addon Majaxxmrkamp26391 08jun2022 1626Document3 pagesAddon Majaxxmrkamp26391 08jun2022 1626Sudip SinghNo ratings yet
- BMW M2 Competition Specifications - Pdf.asset.1596733012292Document2 pagesBMW M2 Competition Specifications - Pdf.asset.1596733012292Gabriel Andrew EstrellaNo ratings yet
- Audio Nav Anti TheftDocument32 pagesAudio Nav Anti TheftAlexandru AlistarhNo ratings yet
- DLCA 2.2.1LaosWattayInternationalAirport 070622 0451 1108Document6 pagesDLCA 2.2.1LaosWattayInternationalAirport 070622 0451 1108Vithaya VORLADETHNo ratings yet
- How Do Hydraulic Brake Boosters WorkDocument2 pagesHow Do Hydraulic Brake Boosters WorkMilion dugumaNo ratings yet
- 4 Consideration of Alternatives: 4.1 GeneralDocument15 pages4 Consideration of Alternatives: 4.1 GeneralHrithik IGNo ratings yet
- TSK TBSDocument2 pagesTSK TBSsallehkarafiNo ratings yet
- Filter Kit AmericanDocument58 pagesFilter Kit AmericanwaggcasNo ratings yet
- The Electric Vehicle: A Review: International Journal of Electric and Hybrid Vehicles January 2017Document19 pagesThe Electric Vehicle: A Review: International Journal of Electric and Hybrid Vehicles January 2017TUSHAR BANGERANo ratings yet
- Kwasaki ZX10R 16Document101 pagesKwasaki ZX10R 16OliverNo ratings yet
- Incoterm Assignment Question 3.b.Document1 pageIncoterm Assignment Question 3.b.Chirag KawaNo ratings yet
- 839.01 821837931001 821837939999 Crawler SystemDocument4 pages839.01 821837931001 821837939999 Crawler Systemeshopmanual EnamNo ratings yet
- Irc 129 2019Document40 pagesIrc 129 2019Madabhushi MadhusudanNo ratings yet
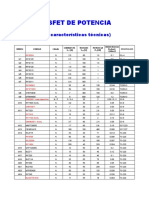
- Mosfet de PotenciaDocument7 pagesMosfet de Potenciaalb_fedeNo ratings yet
- AU-G33-1020-R001 Rev 0 MWS Attendance Report PDFDocument81 pagesAU-G33-1020-R001 Rev 0 MWS Attendance Report PDFThiyagarajah SubbiahNo ratings yet