Download as pdf or txt
You might also like
- A Detailed Explanation of Solenoid ForceDocument8 pagesA Detailed Explanation of Solenoid ForceidescitationNo ratings yet
- Modified Newton-Raphson Load Flow Analysis For Integrated Ac/Dc Power SystemsDocument5 pagesModified Newton-Raphson Load Flow Analysis For Integrated Ac/Dc Power SystemsZuneid AlamNo ratings yet
- Measurements and Instrumentation VinethDocument8 pagesMeasurements and Instrumentation VinethVINETH .RNo ratings yet
- Measurements and Instrumentation VinethDocument8 pagesMeasurements and Instrumentation VinethVINETH .RNo ratings yet
- Submitted By: Indrani Bhattacharjee. VatsalaDocument7 pagesSubmitted By: Indrani Bhattacharjee. VatsalaIndrani BhattacharjeeNo ratings yet
- Sliding Contact DeviceDocument32 pagesSliding Contact DevicebaliamajhiNo ratings yet
- Self Inductance of CoilsDocument22 pagesSelf Inductance of Coilsmaitreyivm21No ratings yet
- S1 Slo1Document40 pagesS1 Slo1Vidhyalakshmi MNo ratings yet
- 1-The Inductor and The Effects of Inductance On A CoilDocument7 pages1-The Inductor and The Effects of Inductance On A Coilmehdi JrNo ratings yet
- Unit V Resonance and Coupled CircuitsDocument28 pagesUnit V Resonance and Coupled CircuitsAJIN RIBIA PNo ratings yet
- Inductor Inductance IDocument31 pagesInductor Inductance IAhmed Ajmine NehalNo ratings yet
- Electronics Tutorials WsDocument11 pagesElectronics Tutorials WsDev BuddyNo ratings yet
- Physics Project: Self Inductance of A CoilDocument6 pagesPhysics Project: Self Inductance of A CoilJyotsanaNo ratings yet
- The InductorDocument25 pagesThe InductorSureshraja9977No ratings yet
- ST Unit 4 NotesDocument25 pagesST Unit 4 Notesabc fun facts100% (1)
- Inductance: The Inductor CaseDocument8 pagesInductance: The Inductor CaseMunyaradzi zonkeNo ratings yet
- The InductorDocument67 pagesThe Inductorleonard1971No ratings yet
- By: Jasper B. DeromaDocument26 pagesBy: Jasper B. DeromaRaging Potato100% (1)
- Why Ac DC TransformersDocument21 pagesWhy Ac DC Transformersapi-252130436No ratings yet
- Inductors Details StudyDocument45 pagesInductors Details StudyTanmay HazraNo ratings yet
- 11.1 - Introduction: Inductors Have A Number of Response CharacteristicsDocument31 pages11.1 - Introduction: Inductors Have A Number of Response CharacteristicsCoco Coco Jorge100% (1)
- Name: - Edward Felton - SectionDocument10 pagesName: - Edward Felton - SectionedNo ratings yet
- Notes Unit1 (BEEE)Document48 pagesNotes Unit1 (BEEE)Vedashree ShetyeNo ratings yet
- Unit - I Transmission Line Theory 1.1 General Theory of Transmission LinesDocument21 pagesUnit - I Transmission Line Theory 1.1 General Theory of Transmission LinesSiva KumarNo ratings yet
- Self Inductance of A CoilDocument8 pagesSelf Inductance of A CoilUnknown RiderNo ratings yet
- INTRODUCTIONDocument11 pagesINTRODUCTIONsiddharthr954No ratings yet
- AbstractDocument9 pagesAbstractSimranNo ratings yet
- Change in Self Inductance With Numbers of TurnsDocument6 pagesChange in Self Inductance With Numbers of TurnshavejsnjNo ratings yet
- 2 1 Transducers EMBUDocument38 pages2 1 Transducers EMBURay NamuNo ratings yet
- Phys 106: General Physics 2: Chapter IV: InductanceDocument63 pagesPhys 106: General Physics 2: Chapter IV: InductancehwuhwuheNo ratings yet
- EE-101 (Unit-3)Document83 pagesEE-101 (Unit-3)Chauhan AyushmaanNo ratings yet
- Comms4 Midterm-Notes 01Document2 pagesComms4 Midterm-Notes 01Pillos, Sean AndreNo ratings yet
- Chapter 11 - Inductors: Introductory Circuit Analysis Robert L. BoylestadDocument32 pagesChapter 11 - Inductors: Introductory Circuit Analysis Robert L. BoylestadDev SharmaNo ratings yet
- Electrical Design of Overhead Transmission LinesDocument15 pagesElectrical Design of Overhead Transmission LinesAp kowshikNo ratings yet
- W8 - Lecture 8 Updated (1) - 220418 - 123943Document34 pagesW8 - Lecture 8 Updated (1) - 220418 - 123943saiedali2005No ratings yet
- Wireless Power Transfer Literature Review by Naters BishDocument15 pagesWireless Power Transfer Literature Review by Naters BishNaters BishNo ratings yet
- PC Chapter 32Document58 pagesPC Chapter 32ultimuNo ratings yet
- Role of Waveguides in em Waves TransmissionDocument9 pagesRole of Waveguides in em Waves TransmissionHamidNo ratings yet
- Pages From FRA 5310-2 - Theo CIGREDocument1 pagePages From FRA 5310-2 - Theo CIGREvũ trầnNo ratings yet
- Lecture3 - EECE 326-01Document13 pagesLecture3 - EECE 326-01Mahmoud AminNo ratings yet
- By: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CDocument17 pagesBy: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CYosef KirosNo ratings yet
- Magnetic Circuit PDFDocument41 pagesMagnetic Circuit PDFAli Al-dulaimyNo ratings yet
- Chapter 2 FINALDocument10 pagesChapter 2 FINALmuhaba muhamedNo ratings yet
- 6 INDUKTORET-USHTRIMA Chap11 InductorsDocument25 pages6 INDUKTORET-USHTRIMA Chap11 InductorsSelindiona ZyberajNo ratings yet
- Wireless Power Transfer Via Strongly Coupled Magnetic ResonancesDocument11 pagesWireless Power Transfer Via Strongly Coupled Magnetic Resonancesapi-3805241100% (1)
- EE17401-M& I Inductive Transducer, Capacitive TransducerDocument31 pagesEE17401-M& I Inductive Transducer, Capacitive TransduceravsNo ratings yet
- Describe How Stub Matching and Quarter Wavelength Transformer Matching Is AccomplishedDocument1 pageDescribe How Stub Matching and Quarter Wavelength Transformer Matching Is AccomplishedDenzel RoxasNo ratings yet
- Transmission Line CharacteristicsDocument9 pagesTransmission Line CharacteristicsMaLik AtifNo ratings yet
- Displacement MeasurementDocument90 pagesDisplacement Measurementsarma gvssNo ratings yet
- Self Mutual InductanceDocument49 pagesSelf Mutual InductancebhaskaaNo ratings yet
- Sensors/Transducers: Principles of Instrumentation and Measurement ( (Bekg 1233) )Document25 pagesSensors/Transducers: Principles of Instrumentation and Measurement ( (Bekg 1233) )SYAFIQAH ISMAILNo ratings yet
- Unit 1 DC CircuitsDocument45 pagesUnit 1 DC CircuitsKaju KatliNo ratings yet
- Ideal Transformer: Circuits Magnetic Flux Electromotive Force Faraday's Law of InductionDocument23 pagesIdeal Transformer: Circuits Magnetic Flux Electromotive Force Faraday's Law of InductionTejasvinee RathiNo ratings yet
- Ece 3323 Experiment 1Document11 pagesEce 3323 Experiment 1TANQUERO_WW20% (1)
- IntroductionDocument10 pagesIntroductiongurmehak singhNo ratings yet
- IT Module 2 Part 1Document21 pagesIT Module 2 Part 1sindhuNo ratings yet
- SR Inter Ipe Question Bank Chapter-Ix (Electromagnetic Induction)Document4 pagesSR Inter Ipe Question Bank Chapter-Ix (Electromagnetic Induction)sojakoj867No ratings yet
- InductorsDocument3 pagesInductorsЕри БгNo ratings yet
- InductorDocument11 pagesInductorSitholElNo ratings yet
- Feynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterFrom EverandFeynman Lectures Simplified 2C: Electromagnetism: in Relativity & in Dense MatterNo ratings yet
- PMMC & Moving IronDocument2 pagesPMMC & Moving IronAnsh MidhaNo ratings yet
- Method of Generation of NanomaterialsDocument24 pagesMethod of Generation of NanomaterialsAnsh MidhaNo ratings yet
- Basic Economics ConceptDocument6 pagesBasic Economics ConceptAnsh MidhaNo ratings yet
- Anderson ExpDocument6 pagesAnderson ExpAnsh MidhaNo ratings yet
- ClamperDocument7 pagesClamperAnsh MidhaNo ratings yet
- ClippersDocument17 pagesClippersAnsh MidhaNo ratings yet
- Elastic TransducersDocument16 pagesElastic TransducersAnsh MidhaNo ratings yet
- VIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsDocument35 pagesVIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsLeonel MartinezNo ratings yet
- Resistance WorksheetDocument2 pagesResistance WorksheetArnulfo LavaresNo ratings yet
- M3310.093 MG15CFX-MG30CFX-MG50CFX-MG101CFX-MG102CFX-MG100HFX PDFDocument27 pagesM3310.093 MG15CFX-MG30CFX-MG50CFX-MG101CFX-MG102CFX-MG100HFX PDFRaphael Barboza100% (1)
- Lecture 14 - Digital Circuits: Inverter Basics - Outline: - AnnouncementsDocument25 pagesLecture 14 - Digital Circuits: Inverter Basics - Outline: - Announcementsayush guptaNo ratings yet
- ABB ACS880 Regenerative Rectifier CTRL PRG FW C A4Document194 pagesABB ACS880 Regenerative Rectifier CTRL PRG FW C A4AhmadNo ratings yet
- Tes P 119 28 R0 PDFDocument93 pagesTes P 119 28 R0 PDFNasser Abdel Raouf100% (1)
- Power PlanningDocument67 pagesPower PlanningsudhirNo ratings yet
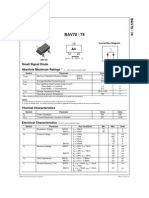
- MarkingCode - A4T - PartNumber - BAV70Document2 pagesMarkingCode - A4T - PartNumber - BAV70patopickNo ratings yet
- Polymoog Resonator - Build - Fritzgreyve v1-9Document18 pagesPolymoog Resonator - Build - Fritzgreyve v1-9Hélio MandecoNo ratings yet
- Analysis of DC Offset in Fault Current Caused by MDocument6 pagesAnalysis of DC Offset in Fault Current Caused by MLast Greed7up1No ratings yet
- Study of Solar Grinding MillDocument38 pagesStudy of Solar Grinding MillNikhil NarwariaNo ratings yet
- Heating Effect of Electric Current: Electricity IDocument7 pagesHeating Effect of Electric Current: Electricity IAlexandruNo ratings yet
- User Manual: Color Video Door Phone Cdv-35HDocument9 pagesUser Manual: Color Video Door Phone Cdv-35HArtur HayrapetyanNo ratings yet
- Direct-Current Glow Discharges in Atmospheric Pressure Air PlasmasDocument10 pagesDirect-Current Glow Discharges in Atmospheric Pressure Air Plasmaseze_firmatenseNo ratings yet
- Blackout RestorationDocument26 pagesBlackout RestorationSiddhant Satpathy100% (1)
- Basic Equipment Wiring AGY EngineDocument20 pagesBasic Equipment Wiring AGY EnginemasterbfishNo ratings yet
- Transformer Test FormDocument5 pagesTransformer Test FormJoriel InesNo ratings yet
- Kde12ea PDFDocument20 pagesKde12ea PDFMohammed Abbas100% (1)
- Revision - 1 - On ElectrochemistryDocument12 pagesRevision - 1 - On ElectrochemistryKiro RemonNo ratings yet
- Manual Vaf enDocument17 pagesManual Vaf enMihnea-Bogdan NicolaescuNo ratings yet
- Unit 1 - ShipDocument48 pagesUnit 1 - ShipThe SinghNo ratings yet
- Bs 7870 4-10-12!7!22kv Aluminium Mdpe CableDocument2 pagesBs 7870 4-10-12!7!22kv Aluminium Mdpe Cableteboneh742No ratings yet
- 06 2010 Lindberg ProceedingsNDES2010Document5 pages06 2010 Lindberg ProceedingsNDES2010Erik LindbergNo ratings yet
- Hitachi Repair Tips PDFDocument44 pagesHitachi Repair Tips PDFRajaNo ratings yet
- Piu RajakDocument18 pagesPiu Rajakpiu_rajakNo ratings yet
- Study On Automated Car Parking System Based On Microcontroller IJERTV3IS10140 PDFDocument4 pagesStudy On Automated Car Parking System Based On Microcontroller IJERTV3IS10140 PDFJawad HussineNo ratings yet
- Physics All IndiaDocument17 pagesPhysics All IndiahiNo ratings yet
- Design of High Frequency Voltage Controlled OscillDocument5 pagesDesign of High Frequency Voltage Controlled OscillmoezawNo ratings yet
- Design of A Low-Cost Contact-Less Digital - Like PDFDocument3 pagesDesign of A Low-Cost Contact-Less Digital - Like PDFMed MaxNo ratings yet