Download as pdf or txt
You might also like
- Assignment 1: CMSC 498L Released: Feb-14. Due Feb-21Document2 pagesAssignment 1: CMSC 498L Released: Feb-14. Due Feb-21Zu KiNo ratings yet
- 2.1-2.3 WS ConditionalsDocument2 pages2.1-2.3 WS ConditionalsAlrianne Batonghinog0% (2)
- Rainbow DocumentationDocument35 pagesRainbow DocumentationAndrés BorgesNo ratings yet
- BackPropagation Through TimeDocument6 pagesBackPropagation Through Timemilan gemerskyNo ratings yet
- Complex Analysis by EduncleDocument28 pagesComplex Analysis by EduncleVishal GargNo ratings yet
- QB 1Document21 pagesQB 1chota bheemNo ratings yet
- Lecture 37: Galerkin FEM Galerkin FEMDocument7 pagesLecture 37: Galerkin FEM Galerkin FEMTapas KumarNo ratings yet
- Y2017p4q2 PDFDocument1 pageY2017p4q2 PDFBizzleJohnNo ratings yet
- 14 DeepDocument6 pages14 DeepketatayosriNo ratings yet
- Imperial College London Bsci/Msci Examination May 2016 Mph2 Mathematical MethodsDocument6 pagesImperial College London Bsci/Msci Examination May 2016 Mph2 Mathematical MethodsRoy VeseyNo ratings yet
- Functions of Complex Variables and Complex IntegrationDocument4 pagesFunctions of Complex Variables and Complex IntegrationAnu VeeraputhiranNo ratings yet
- BTMA 301: Quiz, Assignment & QB Unit - IDocument20 pagesBTMA 301: Quiz, Assignment & QB Unit - IAnushkaNo ratings yet
- Python Deep Learning NotesDocument31 pagesPython Deep Learning NotesPulkit GargNo ratings yet
- ICNN SupplementaryDocument5 pagesICNN SupplementaryGyana Ranjan NayakNo ratings yet
- Insurance Analytics: Prof. Julien TrufinDocument35 pagesInsurance Analytics: Prof. Julien Trufindavid AbotsitseNo ratings yet
- QuadratureDocument25 pagesQuadratureDakaloNo ratings yet
- Accelerated Distributed Algorithms For Optimization Problem and Its Application To Economic Dispatch ProblemsDocument56 pagesAccelerated Distributed Algorithms For Optimization Problem and Its Application To Economic Dispatch ProblemsIsmiRosyianaFitriNo ratings yet
- Neural Networks and Neural Language ModelsDocument27 pagesNeural Networks and Neural Language ModelsFairooz TorosheNo ratings yet
- Machine Learning: The Hundred-Page BookDocument17 pagesMachine Learning: The Hundred-Page BookRafael AmaralNo ratings yet
- Chap 5Document11 pagesChap 5Umair Ali RajputNo ratings yet
- Problems For MATH-4300 Complex VariablesDocument25 pagesProblems For MATH-4300 Complex VariablesYeshan JuberiNo ratings yet
- Feedback LinearizationDocument47 pagesFeedback LinearizationPTR77No ratings yet
- Finite Difference Discretization of Elliptic Equations: 1D ProblemDocument32 pagesFinite Difference Discretization of Elliptic Equations: 1D Problempearl301010No ratings yet
- Complex SlidesDocument43 pagesComplex SlidesAkash PNo ratings yet
- Chapter 6 (4 Lectures)Document16 pagesChapter 6 (4 Lectures)mayankNo ratings yet
- M2 - Mid Sem IDocument2 pagesM2 - Mid Sem IHiten AhujaNo ratings yet
- 斯坦福大学机器学习数学基础 41-48Document8 pages斯坦福大学机器学习数学基础 41-482285145156No ratings yet
- ENGR 233 Lecture 19 FinalDocument8 pagesENGR 233 Lecture 19 FinalZiad JreijNo ratings yet
- Finite Element MethodsDocument10 pagesFinite Element MethodsChiranjit SauNo ratings yet
- 10-701/15-781 Machine Learning Mid-Term Exam Solution: Your NameDocument12 pages10-701/15-781 Machine Learning Mid-Term Exam Solution: Your NameProfessor, CSE Veltech, ChennaiNo ratings yet
- Selected Sols2Document2 pagesSelected Sols2sannintkdNo ratings yet
- 8 - Analytic FunctionsDocument40 pages8 - Analytic FunctionsFebian Melwa Reksa AdityaNo ratings yet
- Calculus of Complex Function: Module - 01Document28 pagesCalculus of Complex Function: Module - 01ShashankaNo ratings yet
- NNLS1 2019 HW4 SolutionsDocument11 pagesNNLS1 2019 HW4 SolutionsADSTE ETWNo ratings yet
- Neural Network QuestionsDocument9 pagesNeural Network QuestionsPragati RajputNo ratings yet
- A2.2 DNN Update 2Document51 pagesA2.2 DNN Update 2ruyi dingNo ratings yet
- Elec9732-Hw2 2021Document1 pageElec9732-Hw2 2021Muhammed IrfanNo ratings yet
- ExercisesDocument6 pagesExercisesms20101No ratings yet
- 12 Nonparametric IVDocument7 pages12 Nonparametric IVdssdNo ratings yet
- Neural NetworksDocument60 pagesNeural NetworkstsabharwalNo ratings yet
- 29 2 SFC N Vol IntsDocument21 pages29 2 SFC N Vol Intstarek moahmoud khalifaNo ratings yet
- Artificial Neural Networks - : IntroductionDocument20 pagesArtificial Neural Networks - : IntroductionSangeeta TiwariNo ratings yet
- Artificial Neural Networks - : IntroductionDocument20 pagesArtificial Neural Networks - : Introductionmvs.2016 2016No ratings yet
- Module-4 COMPLEX DIFFERENTIATION PDFDocument40 pagesModule-4 COMPLEX DIFFERENTIATION PDFPreetham N KumarNo ratings yet
- 11.1 Combinatorial CircuitsDocument24 pages11.1 Combinatorial CircuitsMaxi BradNo ratings yet
- MCT 6 Time Discrete FilterDocument20 pagesMCT 6 Time Discrete FilterVarunNo ratings yet
- Sample 3Document3 pagesSample 3sahlewel weldemichaelNo ratings yet
- The Residue Theorem and Its ApplicationsDocument10 pagesThe Residue Theorem and Its ApplicationsChenduran PillaiNo ratings yet
- Lecture 5Document7 pagesLecture 5Md.Shariful AlamNo ratings yet
- Neural Network 1Document34 pagesNeural Network 1shekharincredibleNo ratings yet
- Lec. 03 - An Introduction To Support Vector Machines - Giorgio Valentini U. MilanoDocument42 pagesLec. 03 - An Introduction To Support Vector Machines - Giorgio Valentini U. MilanoAlejandro VasquezNo ratings yet
- One Dimensional Integrals in Several Variables: 9.1 Differentiation Under The IntegralDocument18 pagesOne Dimensional Integrals in Several Variables: 9.1 Differentiation Under The IntegralKaloyan KrastevNo ratings yet
- Machine Learning With Convolutional Neural NetworksDocument22 pagesMachine Learning With Convolutional Neural NetworksTàngHìnhNo ratings yet
- Intro To 2D Ideal FlowDocument9 pagesIntro To 2D Ideal FlowMyat Thu HtetNo ratings yet
- Kagan Lecture2Document118 pagesKagan Lecture2Narendra SinghNo ratings yet
- Class 12 Maths Formula DerivationsDocument4 pagesClass 12 Maths Formula DerivationsAmaan ShaikhNo ratings yet
- Chapter 5 PDFDocument7 pagesChapter 5 PDFSHIVAS RAINANo ratings yet
- Exercise Solutions To Complex Analysis: Thanks To The William's Work!Document20 pagesExercise Solutions To Complex Analysis: Thanks To The William's Work!Franco Golfieri MadriagaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Problems in Complex AnalysisDocument2 pagesProblems in Complex AnalysisGyana Ranjan NayakNo ratings yet
- Indian Association For The Cultivation of ScienceDocument1 pageIndian Association For The Cultivation of ScienceGyana Ranjan NayakNo ratings yet
- Variational AutoencoderDocument21 pagesVariational AutoencoderGyana Ranjan NayakNo ratings yet
- ICNN SupplementaryDocument5 pagesICNN SupplementaryGyana Ranjan NayakNo ratings yet
- Arnold, V.I. - Ordinary Differential Equations - RedDocument302 pagesArnold, V.I. - Ordinary Differential Equations - RedBho BhoNo ratings yet
- TechwritingengreportDocument11 pagesTechwritingengreportapi-367822450No ratings yet
- 2020 Putnam SolutionsDocument20 pages2020 Putnam SolutionsRaiyan ZannatNo ratings yet
- Math 4 Worksheet Quarter 3 Week 1 and 2aDocument7 pagesMath 4 Worksheet Quarter 3 Week 1 and 2aLay Zel100% (2)
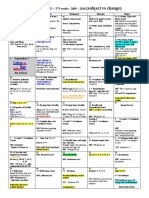
- (Subject To Change) : Adv. Geometry Fbisd - 1 9 Weeks - 2009 - 2010Document4 pages(Subject To Change) : Adv. Geometry Fbisd - 1 9 Weeks - 2009 - 2010doogie1No ratings yet
- Linear Algebra For Computational EngineeringDocument21 pagesLinear Algebra For Computational EngineeringCovenant AdeogoNo ratings yet
- Suppose V Is A Complex Vector Space, $T - in - Mathcal (L) (V) ,$ - QuizletDocument4 pagesSuppose V Is A Complex Vector Space, $T - in - Mathcal (L) (V) ,$ - QuizletLeønNo ratings yet
- Introduction To Finite Element MethodsDocument31 pagesIntroduction To Finite Element Methodsaap1No ratings yet
- 2Gr.7 - IntegersDocument4 pages2Gr.7 - IntegersMary Grace Ebaña TribunsayNo ratings yet
- Vakil - Foundations of Algebraic GeometryDocument704 pagesVakil - Foundations of Algebraic GeometryfdfefsfsfNo ratings yet
- 3.2 The Roots of Quadratic FunctionsDocument9 pages3.2 The Roots of Quadratic FunctionsVon A. DamirezNo ratings yet
- Modeling and Simulation in Fibrous Materials PDFDocument403 pagesModeling and Simulation in Fibrous Materials PDFRian Pradana100% (1)
- Maths StrategyDocument3 pagesMaths Strategyaskmeon201No ratings yet
- MAT1581 Assignment 3 - SolutionsDocument5 pagesMAT1581 Assignment 3 - SolutionsLEANATTENo ratings yet
- AC CircuitDocument210 pagesAC CircuitRagilNo ratings yet
- Equations of Straight Lines Practice - MathBitsNotebook (A1 - CCSS Math)Document5 pagesEquations of Straight Lines Practice - MathBitsNotebook (A1 - CCSS Math)agus agusNo ratings yet
- Welcome To: San Enrique CampusDocument46 pagesWelcome To: San Enrique CampusJayson PalmaNo ratings yet
- MATH 3 2ND QUARTER LAS - EthelmaguilarDocument36 pagesMATH 3 2ND QUARTER LAS - EthelmaguilarJohn Harzel Naga100% (1)
- Modal System KDocument4 pagesModal System KnameNo ratings yet
- Assignment 1 (B.SC - II) Charpit's MethodDocument2 pagesAssignment 1 (B.SC - II) Charpit's MethodMohammadFaizan71% (7)
- General Mathematics: S.Y. 2021 - 2022 1 QuarterDocument4 pagesGeneral Mathematics: S.Y. 2021 - 2022 1 QuarterJason GullaNo ratings yet
- M 111 RevDocument13 pagesM 111 RevDexter BordajeNo ratings yet
- Introduction To Normal Distribution: Nathaniel E. HelwigDocument56 pagesIntroduction To Normal Distribution: Nathaniel E. HelwigVidaup400% (1)
- Pset1 Solutions PDFDocument2 pagesPset1 Solutions PDFJoe BergeronNo ratings yet
- Advances in Adaptive Control Theory GradDocument165 pagesAdvances in Adaptive Control Theory GradedumacerenNo ratings yet
- Matlab (FUAD MAHFUDIANTO)Document14 pagesMatlab (FUAD MAHFUDIANTO)Fuad EngineNo ratings yet
- Reiman HypothesisDocument30 pagesReiman HypothesisadamNo ratings yet
- MAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringDocument2 pagesMAN-102, Tutorial Sheet-1: Linear Algebra: (Vector SpringSHIVAM MAANNo ratings yet
- Quiz3 2015 SolutionsDocument8 pagesQuiz3 2015 SolutionsGerald RattichNo ratings yet