Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Audiometro Impedanciometro Interacoustics At235 - MsDocument89 pagesAudiometro Impedanciometro Interacoustics At235 - MsAnonymous dGFqrw5vO100% (1)
- Torque Analysis of Permanent Magnet Hybrid StepperDocument10 pagesTorque Analysis of Permanent Magnet Hybrid Stepperdiego peinadoNo ratings yet
- Theoretical, Numerical and Experimental Prediction of Pump As Turbine PDFDocument7 pagesTheoretical, Numerical and Experimental Prediction of Pump As Turbine PDFtri_rachmantoNo ratings yet
- Permanent Magnet Starter-Generator For Aircraft Application: September 2014Document4 pagesPermanent Magnet Starter-Generator For Aircraft Application: September 2014PraveenKumarRanjanNo ratings yet
- S Synch Roto Hron or Opt Nous R Timiza Reluc Ation Ctanc N For Ce Mo R Otors SDocument23 pagesS Synch Roto Hron or Opt Nous R Timiza Reluc Ation Ctanc N For Ce Mo R Otors Ssuresh krishnanNo ratings yet
- Bearing of MotorDocument4 pagesBearing of MotorJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- K Patel 2010 IOP Conf. Ser. Earth Environ. Sci. 12 012048Document9 pagesK Patel 2010 IOP Conf. Ser. Earth Environ. Sci. 12 012048Pisindu DanushaNo ratings yet
- P6E-1 Optimization Methodology For Piezoelectric Transformers DesignDocument5 pagesP6E-1 Optimization Methodology For Piezoelectric Transformers DesignmedNo ratings yet
- Recent Developments and Applications in Geotechnical Field Investigations For Deep FoundationsDocument20 pagesRecent Developments and Applications in Geotechnical Field Investigations For Deep FoundationsPhúc TrươngNo ratings yet
- Shethopt 2003Document4 pagesShethopt 2003sumitNo ratings yet
- Torque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodDocument7 pagesTorque Ripple Analysis of A PM Brushless DC Motor Using Finite Element MethodMoathNo ratings yet
- Computers & Fluids: Yang Sun-Sheng, Kong Fan-Yu, Jiang Wan-Ming, Qu Xiao-YunDocument7 pagesComputers & Fluids: Yang Sun-Sheng, Kong Fan-Yu, Jiang Wan-Ming, Qu Xiao-YunAmbarNo ratings yet
- Design and Simulation Studies On An Esp System IJERTV10IS080182Document5 pagesDesign and Simulation Studies On An Esp System IJERTV10IS080182Alfurjani AbubakrNo ratings yet
- Rotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDocument6 pagesRotor Slot Distance Effects On Output Parameters in Single Phase Induction MotorsDr. Aslan JalalNo ratings yet
- Rout 2018Document6 pagesRout 2018Ashribad PattnaikNo ratings yet
- IIT Kharagpur: Pradipta PatraDocument4 pagesIIT Kharagpur: Pradipta PatraSunil PradhanNo ratings yet
- Design Procedure For Switched-Reluctance Motors: of ofDocument6 pagesDesign Procedure For Switched-Reluctance Motors: of ofSuman SahaNo ratings yet
- 20 1105 1 DRDocument7 pages20 1105 1 DRSigne Romain KENGNENo ratings yet
- Pa46 Exp9Document11 pagesPa46 Exp913Abhishek BhosaleNo ratings yet
- 12 Tie 0965 R2Document12 pages12 Tie 0965 R2ZahraaRaz 1996No ratings yet
- Design and Simulation Studies On ESP SystemDocument4 pagesDesign and Simulation Studies On ESP SystemJay PatelNo ratings yet
- Design and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsDocument13 pagesDesign and Simulation of A Servo-Drive Motor Using ANSYS ElectromagneticsMustafa AlhumayreNo ratings yet
- Propeller Shaft DesignDocument5 pagesPropeller Shaft DesignJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 pagesNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliNo ratings yet
- Pspice Simulation of SPIMDocument7 pagesPspice Simulation of SPIMMohammad SubhanNo ratings yet
- Leman 2019 IOP Conf. Ser. Mater. Sci. Eng. 694 012017Document11 pagesLeman 2019 IOP Conf. Ser. Mater. Sci. Eng. 694 012017emerson william vidalNo ratings yet
- Dynamic Analysis of Hysteresis Motor Using Matlab - SimulinkDocument7 pagesDynamic Analysis of Hysteresis Motor Using Matlab - SimulinkMouli ReddyNo ratings yet
- Improved Control System of PM Machine With Extended Field Control Capability For EV DriveDocument9 pagesImproved Control System of PM Machine With Extended Field Control Capability For EV DriveMouhcine HajjoujeNo ratings yet
- Finite-Element Models For Electrical Machines by HennebergerDocument12 pagesFinite-Element Models For Electrical Machines by HennebergermuhassadiNo ratings yet
- Analyzing The Starting Current of Induction Motor in ATP: Journal Paper ReviewDocument5 pagesAnalyzing The Starting Current of Induction Motor in ATP: Journal Paper ReviewAbhishek JoshiNo ratings yet
- Journalnx PZTDocument3 pagesJournalnx PZTJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- Mod Al Analysis of Stepped Shaft IDocument9 pagesMod Al Analysis of Stepped Shaft IShivam Chakravarti SinghamNo ratings yet
- Micro-Size Pulse Detonation Engine Performance: Aoyama Gakuin University, Sagamihara, Kanagawa, 229-8558, JapanDocument9 pagesMicro-Size Pulse Detonation Engine Performance: Aoyama Gakuin University, Sagamihara, Kanagawa, 229-8558, Japankoi naiNo ratings yet
- Steady State Analysis of Synch To No UsDocument4 pagesSteady State Analysis of Synch To No UsJara FeyisaNo ratings yet
- Relay and Timer Based Automatic Star-Delta StarterDocument3 pagesRelay and Timer Based Automatic Star-Delta StarterInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Astuty 2016 IOP Conf. Ser. Mater. Sci. Eng. 128 012023Document9 pagesAstuty 2016 IOP Conf. Ser. Mater. Sci. Eng. 128 012023Faith EseriNo ratings yet
- Experimental Design and Analysis of Pump As TurbinDocument12 pagesExperimental Design and Analysis of Pump As TurbinSebastián Alexander Flores OroscoNo ratings yet
- Application For Step-Skewing of Rotor of IPM MotorDocument5 pagesApplication For Step-Skewing of Rotor of IPM MotorNguyễn Quốc KhánhNo ratings yet
- Determination of Combination of Input Values of Simulated Motor Using Taguchi MethodDocument12 pagesDetermination of Combination of Input Values of Simulated Motor Using Taguchi MethodInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Optimal Design of Interior Permanent Magnet - Lee - 2013Document6 pagesOptimal Design of Interior Permanent Magnet - Lee - 2013Maycon MaranNo ratings yet
- Sample 11935Document16 pagesSample 11935Drumil AdbhaiNo ratings yet
- Fault Analysis in Parallel Inverter Topology For Induction Motor DriveDocument10 pagesFault Analysis in Parallel Inverter Topology For Induction Motor DriveVivek MishraNo ratings yet
- Modal Analysis of VT PumpDocument5 pagesModal Analysis of VT PumpPOOJA JAISWALNo ratings yet
- Performance Curves For Centrifugal PumpsDocument17 pagesPerformance Curves For Centrifugal Pumpsjack100% (1)
- Asymmetric Bridge Converter For Switched Reluctance MotorDocument4 pagesAsymmetric Bridge Converter For Switched Reluctance MotorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ElanDocument7 pagesElanMustafa Oğuz DALNo ratings yet
- Sodiq 2018 IOP Conf. Ser. Mater. Sci. Eng. 384 012013Document10 pagesSodiq 2018 IOP Conf. Ser. Mater. Sci. Eng. 384 012013Hưng Ngô GiaNo ratings yet
- Frictional Contact Stress Analysis of Spur Gear by Using Finite Element MethodDocument6 pagesFrictional Contact Stress Analysis of Spur Gear by Using Finite Element MethodPietroNo ratings yet
- Experiment - 9 - Stepper MotorDocument5 pagesExperiment - 9 - Stepper MotorABHISHEK SHARMANo ratings yet
- PSCLEJPTDocument15 pagesPSCLEJPTHamdika PutraNo ratings yet
- Effect of Magnet Size On Torque Characteristic ofDocument5 pagesEffect of Magnet Size On Torque Characteristic ofDavid AzadNo ratings yet
- 104PMDC 2555Document5 pages104PMDC 2555YES UCETianNo ratings yet
- Harmonic Analysis of Different PWM Techniques Used in InverterDocument7 pagesHarmonic Analysis of Different PWM Techniques Used in InverterKedar PatilNo ratings yet
- DC Motor Speed ControllerDocument19 pagesDC Motor Speed ControllerParmar KundanNo ratings yet
- Switching-Off Angle Control For Switched Reluctance Motor Using Adaptive Neural Fuzzy Inference SystemDocument8 pagesSwitching-Off Angle Control For Switched Reluctance Motor Using Adaptive Neural Fuzzy Inference SystemBharath ykNo ratings yet
- Poster FinalDocument1 pagePoster FinalkspariharNo ratings yet
- Phase Inductance Estimation For Switched Reluctance Motor Using Adaptive Neuro-Fuzzy Inference SystemDocument9 pagesPhase Inductance Estimation For Switched Reluctance Motor Using Adaptive Neuro-Fuzzy Inference Systemakoca23No ratings yet
- M ErginSahinDocument9 pagesM ErginSahinbbb bbbNo ratings yet
- PDu Lab 2 Roll No 058Document5 pagesPDu Lab 2 Roll No 058NiTrO jOk3RNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Required Practical - Investigating Flux Linkage On A Search CoilDocument29 pagesRequired Practical - Investigating Flux Linkage On A Search CoilrizwanNo ratings yet
- P94x Micom RelaysDocument398 pagesP94x Micom RelaysLasantha GunatillakeNo ratings yet
- Direct Digital ControllerDocument2 pagesDirect Digital ControllerRushikesh Uttamrao patilNo ratings yet
- X 110Document107 pagesX 110JimNo ratings yet
- Knowledge Bank CH1Document19 pagesKnowledge Bank CH1Malak SamirNo ratings yet
- K T - B L: Eeley Rue Ypass OoperDocument1 pageK T - B L: Eeley Rue Ypass OoperricardoNo ratings yet
- Technical Data: G2750SMU5Document3 pagesTechnical Data: G2750SMU5Wilman Elias Gutierrez RadaNo ratings yet
- NCP1608 DWSDocument4 pagesNCP1608 DWSAlonso CoradoNo ratings yet
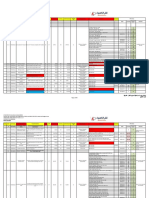
- Hassa MSD Format Operational Spare For 4400003961Document40 pagesHassa MSD Format Operational Spare For 4400003961Prabhakar SvNo ratings yet
- Experiment 2 Measurement of Voltage and Frequency Using A CRO.Document12 pagesExperiment 2 Measurement of Voltage and Frequency Using A CRO.Tushar Sharma100% (1)
- 12oh Motoniveladora Version Standar 5fm Plano ElectricoDocument2 pages12oh Motoniveladora Version Standar 5fm Plano Electricomiguelcastillo100% (1)
- SIEMENS 7SR158 Argus Catalogue SheetDocument16 pagesSIEMENS 7SR158 Argus Catalogue SheetbrunotomeNo ratings yet
- Intro To PSCAD PowerPoint Rev1.1Document13 pagesIntro To PSCAD PowerPoint Rev1.1Arumugam RajendranNo ratings yet
- Solar TrackerDocument57 pagesSolar TrackerRustum Prasad Sahu100% (4)
- B.tech 3-1 - R18 TT March 2021Document4 pagesB.tech 3-1 - R18 TT March 2021ethanNo ratings yet
- XR60CX: Digital Controller With Defrost and Fans ManagementDocument5 pagesXR60CX: Digital Controller With Defrost and Fans ManagementMostafa ShannaNo ratings yet
- ELX214 Coursework Lab (20%) - 2013 - UpdatedDocument33 pagesELX214 Coursework Lab (20%) - 2013 - UpdatedTeEbhan ChAnthira SeEkaranNo ratings yet
- Digital System Desgin Study AssignmentDocument5 pagesDigital System Desgin Study AssignmentZohaib AliNo ratings yet
- Xylem Flygt 2250 Datasheet 60hzDocument2 pagesXylem Flygt 2250 Datasheet 60hzOren Weinstein0% (1)
- Ares Mixing System Advanced TrainingDocument71 pagesAres Mixing System Advanced TrainingjorgeNo ratings yet
- A Study of The Initial Surge Distribution inDocument17 pagesA Study of The Initial Surge Distribution inibrahimNo ratings yet
- VCM Service Brake Switch CircuitDocument2 pagesVCM Service Brake Switch CircuitLatifa EngineeringNo ratings yet
- Ecen 3104 - 2018 PDFDocument2 pagesEcen 3104 - 2018 PDFAjinkya HimanshuNo ratings yet
- 09 Pressure SwitchDocument6 pages09 Pressure SwitchSugiharto Richard100% (1)
- Faculty of Engineering and Technology: Part-A Max Marks 10Document5 pagesFaculty of Engineering and Technology: Part-A Max Marks 10vaddeanusha203No ratings yet
- Satellite CommunicationDocument26 pagesSatellite CommunicationRoshan RajNo ratings yet
- 2024-2025 Open Elective List ODD SEM - 240518 - 133820Document3 pages2024-2025 Open Elective List ODD SEM - 240518 - 133820shrihari.9919anNo ratings yet
- Cable Cat Gen CablDocument107 pagesCable Cat Gen CablFerdinand LizadaNo ratings yet
- Diris A60Document2 pagesDiris A60Gervais BlainsonNo ratings yet