Download as pdf or txt
You might also like
- Introducción A La Electrodinamica 3ra Edición David J. Griffiths Solution PDFDocument1,142 pagesIntroducción A La Electrodinamica 3ra Edición David J. Griffiths Solution PDFhenry levin parada contrerasNo ratings yet
- (Oxford Science Publications) Attay Kovetz - Electromagnetic Theory-Oxford University Press (2000) PDFDocument2 pages(Oxford Science Publications) Attay Kovetz - Electromagnetic Theory-Oxford University Press (2000) PDFpbmlNo ratings yet
- Nonlinear First Ply Failure Response of Composite Cylindrical Shells Under Non-Uniform Transverse PressureDocument7 pagesNonlinear First Ply Failure Response of Composite Cylindrical Shells Under Non-Uniform Transverse PressureStructcon enterpriseNo ratings yet
- Set No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z yDocument5 pagesSet No. 1: ∂ (ρv) ∂t ∂ρ ∂y ∂τ ∂x ∂τ ∂y ∂τ ∂z ySRINIVASA RAO GANTANo ratings yet
- Lecture 6Document5 pagesLecture 6enlightenedepNo ratings yet
- 06B 9ccmnlatex Article2Document6 pages06B 9ccmnlatex Article2Jhon CastroNo ratings yet
- Physics Note by Shojib-Sir PDFDocument30 pagesPhysics Note by Shojib-Sir PDFtwasin sharanNo ratings yet
- Quiz 1: Reformatted To Remove Blank Pages The Formula Sheets Are at The End of The ExamDocument11 pagesQuiz 1: Reformatted To Remove Blank Pages The Formula Sheets Are at The End of The ExamEmanuel Chilanda MangoNo ratings yet
- HydronoteDocument7 pagesHydronoteBaishali SurNo ratings yet
- Velocity PotentialDocument14 pagesVelocity PotentialGeorge DukeNo ratings yet
- Part1-FE Analysis PDFDocument72 pagesPart1-FE Analysis PDFTak Kee NGNo ratings yet
- Set03 Lec EE2103 DivCurl 21Document27 pagesSet03 Lec EE2103 DivCurl 21harshagarwal2813No ratings yet
- PHYS 130A: Angular Momentum: 1 Review of The Hydrogen AtomDocument6 pagesPHYS 130A: Angular Momentum: 1 Review of The Hydrogen AtomemilynardoniNo ratings yet
- Cosmology PDFDocument202 pagesCosmology PDFkevinchu021195No ratings yet
- Relativistic Quantum Mechanics: Exercises: Preprint Typeset in JHEP Style - HYPER VERSIONDocument6 pagesRelativistic Quantum Mechanics: Exercises: Preprint Typeset in JHEP Style - HYPER VERSIONMahendra SankhuaNo ratings yet
- Assignment - 1, 2, 3 (Save)Document60 pagesAssignment - 1, 2, 3 (Save)comedy worldNo ratings yet
- Ed 2 4 New PDFDocument19 pagesEd 2 4 New PDFPronoy DasNo ratings yet
- Change of Variables in A Double IntegralDocument12 pagesChange of Variables in A Double IntegralTom JonesNo ratings yet
- 1 s2.0 S0898122105001252 MainDocument12 pages1 s2.0 S0898122105001252 MainadilNo ratings yet
- Axisymmetry in Elasticity: "Old Wine in New Bottles"Document15 pagesAxisymmetry in Elasticity: "Old Wine in New Bottles"Carlos JavierNo ratings yet
- Relative Resource ManagerDocument9 pagesRelative Resource ManagerPant EaNo ratings yet
- Timoshenko BeamDocument5 pagesTimoshenko BeamNishal CalebNo ratings yet
- Solution Through Energy MethodDocument25 pagesSolution Through Energy MethodArnab PaulNo ratings yet
- Strictly PD FunctionsDocument11 pagesStrictly PD FunctionsAmartya SauNo ratings yet
- Lecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeDocument6 pagesLecture III: Tensor Calculus and Electrodynamics in Flat SpacetimeRaulNo ratings yet
- Springer NIT SuratDocument11 pagesSpringer NIT SuratSrinivas GNo ratings yet
- Sectional Curvature On MathematicaDocument15 pagesSectional Curvature On MathematicaProf. Luis97No ratings yet
- Implementation of The Virtual Element Method For Coupled ThermomechanicalDocument22 pagesImplementation of The Virtual Element Method For Coupled ThermomechanicalDakhlaouiNo ratings yet
- Theoretical Cosmology and Astrophysics Lecture Notes - Chapter 7Document8 pagesTheoretical Cosmology and Astrophysics Lecture Notes - Chapter 7pacos2020No ratings yet
- Long Straight Wire: E E A EDocument4 pagesLong Straight Wire: E E A EMomoHinamoriChanNo ratings yet
- Unit 3: Analytic FunctionsDocument20 pagesUnit 3: Analytic FunctionsKAVIN PARITHI.SNo ratings yet
- Assignment - 2Document20 pagesAssignment - 2comedy worldNo ratings yet
- Chemical Engineering 150A April 15, 2015 Midterm #2 (150) Problem 1. Cone-And-Plate ViscometerDocument4 pagesChemical Engineering 150A April 15, 2015 Midterm #2 (150) Problem 1. Cone-And-Plate ViscometerJames MillerNo ratings yet
- Fem 1Document8 pagesFem 1Aditya AgrawalNo ratings yet
- Lecture 8Document4 pagesLecture 8Ciprian ComanNo ratings yet
- Lecture One: Harmonic Functions and The Harnack InequalityDocument5 pagesLecture One: Harmonic Functions and The Harnack InequalityMuntazir MehdiNo ratings yet
- Physics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Document12 pagesPhysics With Mathematica Fall 2013 Exercise #1 27 Aug 2012Ali RazaNo ratings yet
- On The Property (Z) : E H. ZariouhDocument11 pagesOn The Property (Z) : E H. Zariouhaznay zakariaeNo ratings yet
- Tutorial On Multivariate Logistic Regression: Javier R. Movellan July 23, 2006Document9 pagesTutorial On Multivariate Logistic Regression: Javier R. Movellan July 23, 2006Vu Duc Hoang VoNo ratings yet
- Solution 776497Document3 pagesSolution 776497Joker 1NNo ratings yet
- Tugas: Persamaan Diferensial Dalam Fisika Nama: Iswari Afala Nim: 4183540001 Kelas: Fisika ND 2018 Dosen: Dr. Alkhafi Maas Siregar, M.Si TugasrutinDocument5 pagesTugas: Persamaan Diferensial Dalam Fisika Nama: Iswari Afala Nim: 4183540001 Kelas: Fisika ND 2018 Dosen: Dr. Alkhafi Maas Siregar, M.Si TugasrutinWariNo ratings yet
- EM10Document11 pagesEM10Johannes MaputsiNo ratings yet
- FEM QuantumDocument5 pagesFEM QuantumSundararajan NatarajanNo ratings yet
- Lecture Notes 4 Conductors: Surface Forces and CapacitanceDocument6 pagesLecture Notes 4 Conductors: Surface Forces and CapacitanceJefersonNo ratings yet
- A Neglected Topic in Relativistic Electrodynamics: Transformation of Electromagnetic IntegralsDocument9 pagesA Neglected Topic in Relativistic Electrodynamics: Transformation of Electromagnetic IntegralsFriny FernándezNo ratings yet
- Ejercicios MMF2Document2 pagesEjercicios MMF2Jhonny RomeroNo ratings yet
- Matrix Calculus - Notes On The Derivative of A Trace: Johannes TraaDocument7 pagesMatrix Calculus - Notes On The Derivative of A Trace: Johannes TraaWei ZengNo ratings yet
- Lecture 3Document6 pagesLecture 3enlightenedepNo ratings yet
- Nonlinear First Ply Failure Response of Composite Cylindrical Shells Under Non-Uniform Transverse PressureDocument7 pagesNonlinear First Ply Failure Response of Composite Cylindrical Shells Under Non-Uniform Transverse PressureStructcon enterpriseNo ratings yet
- 17-U-382 Assignment 2Document6 pages17-U-382 Assignment 2Kayonde VanessaNo ratings yet
- Module 1-Antenna: Retarded Potential, Radiation Field and Power For A Short Dipole AntennaDocument11 pagesModule 1-Antenna: Retarded Potential, Radiation Field and Power For A Short Dipole AntennaRamses Jerez NicurcarNo ratings yet
- Final ProjectDocument4 pagesFinal ProjectChacho BacoaNo ratings yet
- Application of Reciprocal Theorem With Complete Functions in Static and Vibration Problems of Thin Elastic PlatesDocument12 pagesApplication of Reciprocal Theorem With Complete Functions in Static and Vibration Problems of Thin Elastic PlatesSasikorn LeungvichcharoenNo ratings yet
- Fundamental TensorDocument13 pagesFundamental TensorAlfonso David Rios SalgadoNo ratings yet
- Spherical Polar Coordinates: X R Sin Cos y R Sin Sin Z R CosDocument6 pagesSpherical Polar Coordinates: X R Sin Cos y R Sin Sin Z R CosMosa A ShormanNo ratings yet
- Lecture3 PDFDocument46 pagesLecture3 PDFaman maharNo ratings yet
- Optional ExercicesDocument11 pagesOptional ExercicesmyyqdnzkrpNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Axial Fan Solid Model and Specs - CopieDocument8 pagesAxial Fan Solid Model and Specs - CopieRAMAN VERMANo ratings yet
- Siachen Helicopter - Assignment 3Document4 pagesSiachen Helicopter - Assignment 3RAMAN VERMANo ratings yet
- Siachen Helicopter - Assignment 2Document4 pagesSiachen Helicopter - Assignment 2RAMAN VERMANo ratings yet
- Assignment1 Fem 193010035Document9 pagesAssignment1 Fem 193010035RAMAN VERMANo ratings yet
- Lab Report Format PDFDocument1 pageLab Report Format PDFRAMAN VERMANo ratings yet
- Assignment 1Document29 pagesAssignment 1RAMAN VERMANo ratings yet
- AE 667 - Rotary Wing Aerodynamics Assignment 1: Ayush Sarraf 190010014Document14 pagesAE 667 - Rotary Wing Aerodynamics Assignment 1: Ayush Sarraf 190010014RAMAN VERMANo ratings yet
- KG P Stfun Ke: M-M MWWDocument5 pagesKG P Stfun Ke: M-M MWWRAMAN VERMANo ratings yet
- Fem Lec 1 PMM PDFDocument10 pagesFem Lec 1 PMM PDFRAMAN VERMANo ratings yet
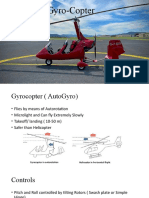
- Gyro CopterDocument5 pagesGyro CopterRAMAN VERMANo ratings yet