Download as pdf or txt
You might also like
- Taller 3 AeroelasticidadDocument7 pagesTaller 3 AeroelasticidadPablo Cesar Ruiz GuzmanNo ratings yet
- Engineering Analysis Homework 6Document4 pagesEngineering Analysis Homework 6AmritaNo ratings yet
- 18.03: Existence and Uniqueness Theorem: Jeremy OrloffDocument4 pages18.03: Existence and Uniqueness Theorem: Jeremy OrloffAlfi LouisNo ratings yet
- existAndUniq PDFDocument4 pagesexistAndUniq PDFAlfi LouisNo ratings yet
- The WronskianDocument4 pagesThe WronskianNiranjan KumarNo ratings yet
- The Principle of Least ActionDocument3 pagesThe Principle of Least ActionKhosrow SohrabyNo ratings yet
- Boyce ODEch 6 S 4 P 20Document5 pagesBoyce ODEch 6 S 4 P 20BC ANo ratings yet
- ch03 2Document23 pagesch03 2phakphumNo ratings yet
- Picards TheoremDocument4 pagesPicards TheoremRapaza FotolicaNo ratings yet
- Poincaré MetricDocument24 pagesPoincaré MetricRohan RajagopalNo ratings yet
- 1-2 State-Variable Description: The Concept of StateDocument31 pages1-2 State-Variable Description: The Concept of Statefarouq_razzaz2574No ratings yet
- Laplace Transform 1Document5 pagesLaplace Transform 1ifiokNo ratings yet
- Major Marking SchemeDocument13 pagesMajor Marking Schemejainnupur321No ratings yet
- 2019 AMAM Exam PaperDocument3 pages2019 AMAM Exam PaperzeliawillscumbergNo ratings yet
- Problems: 1.3 Definitions, Classification, and TerminologyDocument2 pagesProblems: 1.3 Definitions, Classification, and TerminologyJUAN ESTEBAN HERNANDEZ ELEJALDENo ratings yet
- Lecture 3Document26 pagesLecture 3kirilNo ratings yet
- Tutorial 2Document2 pagesTutorial 2Arpita MathurNo ratings yet
- Chapter 2 ReviewDocument10 pagesChapter 2 ReviewkareeraisuNo ratings yet
- Addou 2002Document12 pagesAddou 2002JamalNo ratings yet
- Solutions DIfferenceDocument10 pagesSolutions DIfferenceAdnan AsgharNo ratings yet
- Note 2Document7 pagesNote 2Jolaosho AbdulbateenNo ratings yet
- Example: The Wronskian Determinant of A Second-Order, Linear Homogeneous Differential EquationDocument2 pagesExample: The Wronskian Determinant of A Second-Order, Linear Homogeneous Differential EquationJonathan FebriantoNo ratings yet
- 20 21 B373h4uDocument5 pages20 21 B373h4uSamyNo ratings yet
- Math221: HW# 2 Solutions: Andy Royston October 12, 2005Document12 pagesMath221: HW# 2 Solutions: Andy Royston October 12, 2005Zahid KumailNo ratings yet
- Signal and System NormsDocument15 pagesSignal and System NormsroseNo ratings yet
- 3.7 Wronskians and Variation of Parameters: 3.7.1 The WronskianDocument7 pages3.7 Wronskians and Variation of Parameters: 3.7.1 The WronskianodbayNo ratings yet
- Problem 14Document3 pagesProblem 14Josse TapiaNo ratings yet
- RT ExercisesDocument220 pagesRT ExercisesJhonny tNo ratings yet
- First Order Linear Equations and Bernoulli's Differential EquationDocument8 pagesFirst Order Linear Equations and Bernoulli's Differential EquationferdinandNo ratings yet
- Analyse 4 - Corrigé Type - EMD 1Document4 pagesAnalyse 4 - Corrigé Type - EMD 1asa peter panNo ratings yet
- Assignment 4 Alcisto Instrumentation and ControlDocument8 pagesAssignment 4 Alcisto Instrumentation and Controlmatt DonorNo ratings yet
- LE 1 - Cheat SheetDocument1 pageLE 1 - Cheat SheetRogie M BernabeNo ratings yet
- Semester Test 2 2016 SolutionsDocument3 pagesSemester Test 2 2016 SolutionsTshegofatso KgopaNo ratings yet
- CH 3.2: Fundamental Solutions of Linear Homogeneous EquationsDocument21 pagesCH 3.2: Fundamental Solutions of Linear Homogeneous EquationsRaj SharmaNo ratings yet
- Lab Assignment#2: Name: Class: Master of Science in Chemical and Material Student ID: Subject: Submitted ToDocument18 pagesLab Assignment#2: Name: Class: Master of Science in Chemical and Material Student ID: Subject: Submitted TohussainNo ratings yet
- RedorderDocument2 pagesRedorderEhtishamNo ratings yet
- GW9 SolutionsDocument3 pagesGW9 Solutionswangshiui2002No ratings yet
- hw1 SolnDocument3 pageshw1 Soln周瑞濬No ratings yet
- HW 8 SolutionDocument10 pagesHW 8 SolutionRotem CalisirNo ratings yet
- MAT 302 Chap 05Document15 pagesMAT 302 Chap 05kamaldeen176No ratings yet
- The Hanging Chain Problem PDFDocument10 pagesThe Hanging Chain Problem PDFmhmalki0% (1)
- Section 13.2 Derivatives and Integrals of Vector FunctionsDocument3 pagesSection 13.2 Derivatives and Integrals of Vector FunctionsAlvin AdityaNo ratings yet
- Solution To Exercise 1: Task 1Document5 pagesSolution To Exercise 1: Task 1Rehman SaleemNo ratings yet
- EE4440 HW#2 Solution: February 2, 2011Document4 pagesEE4440 HW#2 Solution: February 2, 2011TibouNo ratings yet
- Signals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksDocument6 pagesSignals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksBokai ZhouNo ratings yet
- Review For Exam 2Document10 pagesReview For Exam 2Mlkhr lgndbNo ratings yet
- Week 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDocument6 pagesWeek 10: Second Order Odes: 3.1. Solution Using Power Series Expansion 3.2. The Legendre EquationsDeepjyoti MajumderNo ratings yet
- PCweek5 2015Document10 pagesPCweek5 2015Roy VeseyNo ratings yet
- HW 5 SolDocument4 pagesHW 5 SolGonzalo SaavedraNo ratings yet
- (Ozgur) - Lecture 4 (2.4)Document7 pages(Ozgur) - Lecture 4 (2.4)Orkun AkyolNo ratings yet
- Solns ch2Document17 pagesSolns ch2Soumitra BhowmickNo ratings yet
- Oscillatory Behavior of A Higher-Order Nonlinear Neutral Type Functional Di Erence Equation With Oscillating Coe CientsDocument8 pagesOscillatory Behavior of A Higher-Order Nonlinear Neutral Type Functional Di Erence Equation With Oscillating Coe CientsChecozNo ratings yet
- Introduction To Communication Systems 1st Edition Madhow Solutions ManualDocument18 pagesIntroduction To Communication Systems 1st Edition Madhow Solutions Manualbradleygillespieditcebswrf100% (15)
- 1 Introduction To Linear Transformations - Section 4.1 of DefranzaDocument33 pages1 Introduction To Linear Transformations - Section 4.1 of DefranzaCarlos VargasNo ratings yet
- ECE45 HW3 SolutionsJDocument13 pagesECE45 HW3 SolutionsJDavid IonNo ratings yet
- Assigment 1Document12 pagesAssigment 1Abhinav PradeepNo ratings yet
- Assignment - 3Document2 pagesAssignment - 3Gunda Venkata SaiNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- The University of Edinburgh Group Theory Problem SetDocument5 pagesThe University of Edinburgh Group Theory Problem SetHaaziquah TahirNo ratings yet
- The University of Edinburgh Dynamical Systems Problem SetDocument4 pagesThe University of Edinburgh Dynamical Systems Problem SetHaaziquah TahirNo ratings yet
- The University of Edinburgh 2nd Year Problem SetDocument2 pagesThe University of Edinburgh 2nd Year Problem SetHaaziquah TahirNo ratings yet
- The University of Edinburgh Group Theory Problem SetDocument3 pagesThe University of Edinburgh Group Theory Problem SetHaaziquah Tahir100% (1)
- Chapter 3 Lines and CirclesDocument10 pagesChapter 3 Lines and CirclesSong KimNo ratings yet
- Eee I Engineering Mathematics I (15mat11) NotesDocument165 pagesEee I Engineering Mathematics I (15mat11) NotesShashank Rao MNo ratings yet
- Cls Jeead-15-16 Xii Mat Target-6 Set-2 Chapter-6Document70 pagesCls Jeead-15-16 Xii Mat Target-6 Set-2 Chapter-6shubhamNo ratings yet
- TEST 2. Derivatives (SOLUTIONS)Document5 pagesTEST 2. Derivatives (SOLUTIONS)Kayleen PerdanaNo ratings yet
- ENG 233 Lecture Notes 5 6Document14 pagesENG 233 Lecture Notes 5 6David Mitry ThomasNo ratings yet
- Chain Rule 3LNDocument2 pagesChain Rule 3LNsaad khNo ratings yet
- Differential Continuity Equation: Eynolds Ransport HeoremDocument5 pagesDifferential Continuity Equation: Eynolds Ransport Heoremquaid_vohraNo ratings yet
- Index Notation - Vector CalculusDocument6 pagesIndex Notation - Vector CalculusRiasat AzimNo ratings yet
- Learning Outcome 4 - Ac 2 (Analytical Methods)Document4 pagesLearning Outcome 4 - Ac 2 (Analytical Methods)Chan Siew ChongNo ratings yet
- Practice Problems: Trig SubstitutionDocument6 pagesPractice Problems: Trig SubstitutionJanry GarciaNo ratings yet
- Sy - Integral CalculusDocument12 pagesSy - Integral CalculusNeelam KapoorNo ratings yet
- C2 Exponentials & Logarithms - AnswersDocument8 pagesC2 Exponentials & Logarithms - AnswersRahma DewiNo ratings yet
- 1-Material Mat3005 SyllabusDocument3 pages1-Material Mat3005 Syllabussahale shera100% (1)
- Finite Element Analysis Answers by Mr. B. Guruprasad: Asst. Professor, MechanicalDocument146 pagesFinite Element Analysis Answers by Mr. B. Guruprasad: Asst. Professor, Mechanicalvishwajeet patilNo ratings yet
- Differential EquationsDocument146 pagesDifferential Equationsbxlmichael8837No ratings yet
- Signals and Systems AssignmentDocument6 pagesSignals and Systems AssignmentSatish Kumar DNo ratings yet
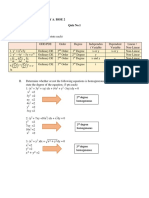
- Ruizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Document5 pagesRuizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Charlene Joy RuizoNo ratings yet
- Curve Sketching 1Document25 pagesCurve Sketching 1falconace94No ratings yet
- Paul's Online Math NotesDocument4 pagesPaul's Online Math NotesAnonymous ox4NSRNo ratings yet
- Lawend Kamal Askar - Assignment 2Document8 pagesLawend Kamal Askar - Assignment 2Lawend KoramarkiNo ratings yet
- Basic Calculus TMLHT 16 20 GUIDEDocument7 pagesBasic Calculus TMLHT 16 20 GUIDESambo Almira IyogNo ratings yet
- MCQS of SeriesDocument14 pagesMCQS of SeriesRamesh Kumar B L100% (4)
- Reg 2013 Auto SyllabusDocument95 pagesReg 2013 Auto SyllabuspavanraneNo ratings yet
- SmithMinton Calculus ET 5e C01 S01Document12 pagesSmithMinton Calculus ET 5e C01 S01maged wagehNo ratings yet
- Basic CalculusDocument359 pagesBasic CalculusVeronica Dela TorreNo ratings yet
- What Are The Rules of Differentiation?: Product RuleDocument3 pagesWhat Are The Rules of Differentiation?: Product RuleKuya Dennis CaballeroNo ratings yet
- Moebius PDFDocument3 pagesMoebius PDFeyenirNo ratings yet
- Handbook PDFDocument244 pagesHandbook PDFShashank SharmaNo ratings yet
- Pure MathDocument66 pagesPure MathGioGio2020100% (1)