Download as pdf or txt
You might also like
- Correcting The Lie of PhysicsDocument227 pagesCorrecting The Lie of PhysicsYanuar Satriya WijayaNo ratings yet
- 2009 Independent Component Analysis For Passive Sonar Signal ProcessingDocument21 pages2009 Independent Component Analysis For Passive Sonar Signal ProcessingdavNo ratings yet
- InTech-Passive Sonar Signal Detection and Classification Based On Independent Component AnalysisDocument12 pagesInTech-Passive Sonar Signal Detection and Classification Based On Independent Component AnalysisAnurag ChoudharyNo ratings yet
- Real TimeWaveletAnalysisofaVibrationSignalBasedonArduino UNOandLabVIEWDocument6 pagesReal TimeWaveletAnalysisofaVibrationSignalBasedonArduino UNOandLabVIEWjesusNo ratings yet
- Sediment Classification Using Side Scan SONARDocument5 pagesSediment Classification Using Side Scan SONARiaetsdiaetsdNo ratings yet
- Marine Vessel Recognition by Acoustic Signature: January 2015Document8 pagesMarine Vessel Recognition by Acoustic Signature: January 2015Bùi Trường GiangNo ratings yet
- Demon e NarrowbandDocument4 pagesDemon e NarrowbandHenrique NetoNo ratings yet
- Irjet V3i7500 PDFDocument4 pagesIrjet V3i7500 PDFshahpinkalNo ratings yet
- Beamforming Echo-Localization System Using Multitone Excitation SignalsDocument6 pagesBeamforming Echo-Localization System Using Multitone Excitation SignalsJosue Manuel Pareja ContrerasNo ratings yet
- 8 Research ProposalDocument10 pages8 Research ProposalMohammad ArifNo ratings yet
- Futureinternet 13 00265 v2Document21 pagesFutureinternet 13 00265 v2SUMIT DATTANo ratings yet
- SDR BasedSystemforSatelliteRangingMeasurements DraftDocument11 pagesSDR BasedSystemforSatelliteRangingMeasurements Draftmisaeljonatasandrade27No ratings yet
- 17 - Chapter 7Document38 pages17 - Chapter 7Bùi Trường GiangNo ratings yet
- Abdulkhaleq 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012043Document8 pagesAbdulkhaleq 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012043Hoàng Nguyễn Mạnh HuyNo ratings yet
- Narrowband Passive Sonar TrackingDocument6 pagesNarrowband Passive Sonar TrackingBùi Trường Giang100% (1)
- Sensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaDocument19 pagesSensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaSupermanNo ratings yet
- Experimental Evaluation of Indoor Localization Using Wireless Sensor NetworksDocument10 pagesExperimental Evaluation of Indoor Localization Using Wireless Sensor NetworksLászló RáczNo ratings yet
- Performance Analysis of Direction of Arrival Estimation Algorithms For Smart AntennaDocument6 pagesPerformance Analysis of Direction of Arrival Estimation Algorithms For Smart AntennaLamiae SqualiNo ratings yet
- FSO System Modules and Design Issues: January 2017Document29 pagesFSO System Modules and Design Issues: January 2017Blade OverNo ratings yet
- 2020-Nanopore Basecalling From A Perspective of Instance SegmentationDocument9 pages2020-Nanopore Basecalling From A Perspective of Instance SegmentationMichael LeeNo ratings yet
- Sensors: Design and Implementation of A Real-Time Multi-Beam Sonar System Based On FPGA and DSPDocument23 pagesSensors: Design and Implementation of A Real-Time Multi-Beam Sonar System Based On FPGA and DSPLuis CastellanosNo ratings yet
- Thesis PHD Giovanni BellusciDocument218 pagesThesis PHD Giovanni BellusciMinh HoangNo ratings yet
- 218 - J18 - Jee - 2020Document15 pages218 - J18 - Jee - 2020Ali Dehghan FiroozabadiNo ratings yet
- InTech-Sonar Systems and Underwater Signal Processing Classic and Modern ApproachesDocument35 pagesInTech-Sonar Systems and Underwater Signal Processing Classic and Modern ApproachesDiego CardosoNo ratings yet
- Semi Active SeekerDocument57 pagesSemi Active SeekertttNo ratings yet
- Estimation of Direction of Arrival (DOA) Using Real-Time Array Signal Processing and Performance AnalysisDocument15 pagesEstimation of Direction of Arrival (DOA) Using Real-Time Array Signal Processing and Performance Analysiscurtis_f_leeNo ratings yet
- Spectrum Sensing in Cognitive Radio NetworksDocument38 pagesSpectrum Sensing in Cognitive Radio NetworksAla AgrebiNo ratings yet
- Journal of Asian Scientific Research: Department of Physics, College of Science, Mosul University Mosul - IraqDocument8 pagesJournal of Asian Scientific Research: Department of Physics, College of Science, Mosul University Mosul - IraqFauzan RohmadNo ratings yet
- Transform Wave Flaw WangYouDocument8 pagesTransform Wave Flaw WangYouchitomomidoNo ratings yet
- The Fundamentals of Spectrum Analysis - Test & Measurement Content From Electronic DesignDocument8 pagesThe Fundamentals of Spectrum Analysis - Test & Measurement Content From Electronic DesigncengzNo ratings yet
- 10 Automatic Target Detection in Ground Survillence RadarDocument10 pages10 Automatic Target Detection in Ground Survillence Radarp_menghalNo ratings yet
- Phased Array Pulsing: A Simple Digital Sonar System: MIT 6.111 Digital Systems LaboratoryDocument86 pagesPhased Array Pulsing: A Simple Digital Sonar System: MIT 6.111 Digital Systems LaboratoryALEJANDRA CAROLINA ROQUE QUISPENo ratings yet
- Investigation of Signal Thresholding Effects On The Accuracy of Sound Source LocalizationDocument6 pagesInvestigation of Signal Thresholding Effects On The Accuracy of Sound Source LocalizationIJAR JOURNALNo ratings yet
- Enhanced Coherent BOTDA System WithoutDocument8 pagesEnhanced Coherent BOTDA System WithoutJoaquín Gómez CarmonaNo ratings yet
- Measurement of Wideband Indoor Radio Propagation Channel Using USRPDocument10 pagesMeasurement of Wideband Indoor Radio Propagation Channel Using USRPBambang Bagus HariantoNo ratings yet
- Moving Window-Based Double Haar Wavelet Transform For Image ProcessingDocument9 pagesMoving Window-Based Double Haar Wavelet Transform For Image ProcessingLagi SantaisajaNo ratings yet
- Moving Window-Based Double Haar Wavelet Transform For Image ProcessingDocument9 pagesMoving Window-Based Double Haar Wavelet Transform For Image ProcessingTamizh IniyanNo ratings yet
- Ananev 2019 J. Phys. Conf. Ser. 1202 012002 PDFDocument9 pagesAnanev 2019 J. Phys. Conf. Ser. 1202 012002 PDFLuis Alfonso Martinez FdezNo ratings yet
- Signal-to-Noise Ratio Improvement in BOTDA Using Balanced DetectionDocument4 pagesSignal-to-Noise Ratio Improvement in BOTDA Using Balanced DetectionJoaquín Gómez CarmonaNo ratings yet
- Nonuniform Bandpass Sampling in Radio ReceiversDocument119 pagesNonuniform Bandpass Sampling in Radio ReceiversPraphul ChandraNo ratings yet
- Active Sampling Rate Calibration Method For Acoustic Sensor NetworksDocument13 pagesActive Sampling Rate Calibration Method For Acoustic Sensor Networks会爆炸的小米NoteNo ratings yet
- FFT Based DLCDocument59 pagesFFT Based DLCvikramNo ratings yet
- Detection and Tracking Using Particle-Filter-Based Wireless Sensor NetworksDocument14 pagesDetection and Tracking Using Particle-Filter-Based Wireless Sensor NetworksmohankalathiNo ratings yet
- Mechanical Systems and Signal ProcessingDocument22 pagesMechanical Systems and Signal ProcessingJuan Camilo Gomez SotoNo ratings yet
- Transient Detection in Speech and Audio SignalsDocument8 pagesTransient Detection in Speech and Audio SignalsThanuja adepuNo ratings yet
- Symbol Rate Classification of PSK/QAM Signals Using Direct Frequency EstimatorsDocument5 pagesSymbol Rate Classification of PSK/QAM Signals Using Direct Frequency Estimatorskuldeep motorsNo ratings yet
- Automatic Fault Diagnosis of Internal Combustion eDocument8 pagesAutomatic Fault Diagnosis of Internal Combustion eznadeem2No ratings yet
- Decawave Vs Bespoon 2016Document8 pagesDecawave Vs Bespoon 2016felixsafar3243No ratings yet
- Identification of Underwater Acoustic NoDocument6 pagesIdentification of Underwater Acoustic Nonhan1999.ntNo ratings yet
- Spectrum Analyzer: H600 / SA2600 Series Data SheetDocument12 pagesSpectrum Analyzer: H600 / SA2600 Series Data SheetBender RodriguezNo ratings yet
- Blind Source Separation Based On A Fast-Convergence Algorithm Combining ICA and BeamformingDocument13 pagesBlind Source Separation Based On A Fast-Convergence Algorithm Combining ICA and Beamformingmahdi114No ratings yet
- ECE 5525FinalProjectDocDocument12 pagesECE 5525FinalProjectDocRamkumar ThiruvenkadamNo ratings yet
- DRDO SonarDocument16 pagesDRDO SonarRaajeswaran Baskaran100% (1)
- Automatic LPI Radar Waveform Recognition Using CNN: IEEE Access January 2018Document14 pagesAutomatic LPI Radar Waveform Recognition Using CNN: IEEE Access January 2018Simyon PinskyNo ratings yet
- 10 1 1 111Document11 pages10 1 1 111deb_ashisdNo ratings yet
- Analysis-Assisted Sound Processing With AudiosculptDocument5 pagesAnalysis-Assisted Sound Processing With AudiosculptAlisa KobzarNo ratings yet
- Achour Modelling Simulation Delay Line Sensors 2018Document5 pagesAchour Modelling Simulation Delay Line Sensors 2018alok pokharelNo ratings yet
- Pyroelectric InfraRed Sensors Based Distance EstimDocument5 pagesPyroelectric InfraRed Sensors Based Distance EstimCaxas BikersNo ratings yet
- Sonar Explorer: A New Tool For Visualization of Fish Schools From 3D Sonar DataDocument9 pagesSonar Explorer: A New Tool For Visualization of Fish Schools From 3D Sonar DataawiuefhaliuefbNo ratings yet
- Vibro-Acoustic Techniques To Diagnose Power TransformersDocument9 pagesVibro-Acoustic Techniques To Diagnose Power TransformersAntonio Marcos SilvaNo ratings yet
- Radar MCQ (Free PDF) - Objective Question Answer For Radar Quiz - Download Now!Document26 pagesRadar MCQ (Free PDF) - Objective Question Answer For Radar Quiz - Download Now!Henrique NetoNo ratings yet
- Contramedidas RadarDocument2 pagesContramedidas RadarHenrique NetoNo ratings yet
- Descrição Funcional Recepção Radar Ran20sDocument5 pagesDescrição Funcional Recepção Radar Ran20sHenrique NetoNo ratings yet
- Aqs-20 20110826 V2Document2 pagesAqs-20 20110826 V2Henrique NetoNo ratings yet
- Sonar 2076Document2 pagesSonar 2076Henrique NetoNo ratings yet
- Tese de Integra Áo de MisseisDocument137 pagesTese de Integra Áo de MisseisHenrique NetoNo ratings yet
- Pulse CompressionDocument40 pagesPulse CompressionHenrique NetoNo ratings yet
- 05hystory - of - Radar Eua e UrssDocument12 pages05hystory - of - Radar Eua e UrssHenrique NetoNo ratings yet
- Asdic Ao SonarDocument19 pagesAsdic Ao SonarHenrique NetoNo ratings yet
- A Brief History of Radar inDocument17 pagesA Brief History of Radar inHenrique NetoNo ratings yet
- SAR Imaging Based On The Wideband Hyperbolic FrequencyDocument23 pagesSAR Imaging Based On The Wideband Hyperbolic FrequencyHenrique NetoNo ratings yet
- 15 05 0244 00 004a Pulse Compression TechniquesDocument14 pages15 05 0244 00 004a Pulse Compression TechniquesHenrique NetoNo ratings yet
- Pervasive Sound The Transformation of ASW Mark MerrifieldDocument17 pagesPervasive Sound The Transformation of ASW Mark MerrifieldHenrique NetoNo ratings yet
- Ethics of Artificial Intelligence and RoboticsDocument41 pagesEthics of Artificial Intelligence and RoboticsHenrique NetoNo ratings yet
- Electronic Warfare EW Historical Perspectives andDocument170 pagesElectronic Warfare EW Historical Perspectives andHenrique NetoNo ratings yet
- What Are Frontier Technologies and Their Applications?Document3 pagesWhat Are Frontier Technologies and Their Applications?Henrique NetoNo ratings yet
- Chapter ThirtyDocument4 pagesChapter ThirtyHenrique NetoNo ratings yet
- Aperture in PhotographyDocument4 pagesAperture in PhotographyHenrique NetoNo ratings yet
- Reading Comprehension PracticeDocument10 pagesReading Comprehension PracticeMomi BearFruitsNo ratings yet
- RPT Science Year 4Document15 pagesRPT Science Year 4farahNo ratings yet
- 2fy2-01 Engineering Mathematics-I (A To D)Document3 pages2fy2-01 Engineering Mathematics-I (A To D)gwanfldlwjwuwNo ratings yet
- Flo Rite FRDocument4 pagesFlo Rite FRJorge Selim Asaff ArancibiaNo ratings yet
- Exp No 6Document11 pagesExp No 6حسين عبد الرحيم شاكرNo ratings yet
- High Decoupler - Google SearchDocument2 pagesHigh Decoupler - Google SearchaporiaNo ratings yet
- Expert Systems With Applications: Murat Caner, Engin Gedik, Ali KeçebasßDocument7 pagesExpert Systems With Applications: Murat Caner, Engin Gedik, Ali KeçebasßabdullaalakourNo ratings yet
- Lesson 3 - Energy CalculationsDocument10 pagesLesson 3 - Energy CalculationsTalha HossainNo ratings yet
- UG Curriculum - Department of Chemical EngineeringDocument7 pagesUG Curriculum - Department of Chemical EngineeringanshuNo ratings yet
- MOSEKModeling CookbookDocument127 pagesMOSEKModeling CookbookBukaNo ratings yet
- BC245MODocument3 pagesBC245MOsudipto ranjan dassNo ratings yet
- Initial Ring BendingDocument13 pagesInitial Ring BendingmdabdullaNo ratings yet
- CBSE Sample Paper Class 6 Maths Half Yearly Set 3: All Questions Are CompulsoryDocument3 pagesCBSE Sample Paper Class 6 Maths Half Yearly Set 3: All Questions Are CompulsoryShivank PandeyNo ratings yet
- SM 6th Sem Mech Industrial Robotics AutomationDocument39 pagesSM 6th Sem Mech Industrial Robotics AutomationSulaiman AL MajdubNo ratings yet
- De SeriesSolutionsDocument12 pagesDe SeriesSolutionsJames musambakiNo ratings yet
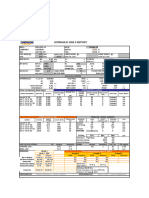
- Hydraulic Report Mudlogging ExampleDocument1 pageHydraulic Report Mudlogging ExampleCarmen Ibeth Olivos PradaNo ratings yet
- Biosignals & Biosystems: Block 2. The Z-TransformDocument69 pagesBiosignals & Biosystems: Block 2. The Z-Transformmaria reverteNo ratings yet
- Manual GenUVPDocument17 pagesManual GenUVPAnonymous mE6MEje0No ratings yet
- Motion in A Straight LineDocument16 pagesMotion in A Straight Lineuniverse2010No ratings yet
- Unit 3 - Steam and Gas TurbinesDocument94 pagesUnit 3 - Steam and Gas TurbinesDHANASEKAR K IV A 9023No ratings yet
- (Lecture Notes of The Les Houches Summer School 103, August 2014) Claudio Chamon, Mark O. Goerbig, Roderich Moessner, Leticia F. Cugliandolo - Topological Aspects of Condensed Matter Physics (201 PDFDocument705 pages(Lecture Notes of The Les Houches Summer School 103, August 2014) Claudio Chamon, Mark O. Goerbig, Roderich Moessner, Leticia F. Cugliandolo - Topological Aspects of Condensed Matter Physics (201 PDFOmar Perez VelozNo ratings yet
- What Is Mathematics?: Importance of Mathematics in Society Development by Choolwe CheeloDocument9 pagesWhat Is Mathematics?: Importance of Mathematics in Society Development by Choolwe CheeloChoolwe CheeloNo ratings yet
- 25 MM Nozzle Paut Scan PlanDocument4 pages25 MM Nozzle Paut Scan PlanRupam BaruahNo ratings yet
- Introduction To Bachelor in Nautical ScienceDocument7 pagesIntroduction To Bachelor in Nautical ScienceSurabhi RtNo ratings yet
- Liquid CrystalDocument31 pagesLiquid Crystalrajtripathi0305No ratings yet
- ESRDocument30 pagesESRAjayvidyanand SharmaNo ratings yet
- Exp. Portal Frame (2 Experiments)Document5 pagesExp. Portal Frame (2 Experiments)sajjadNo ratings yet
- 2021 Bchs Buea CBC Mock Results Al General RealDocument2 pages2021 Bchs Buea CBC Mock Results Al General RealSimonNo ratings yet
- Fluid Architecture and Flexible MouldingDocument2 pagesFluid Architecture and Flexible MouldingParthgautamNo ratings yet