
Comparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic Models
Comparison of Direct Voltage Control Methods of Multi-Terminal DC (MTDC) Networks Through Modular Dynamic Models
You might also like
- Exam - Buck ElectronicaDocument15 pagesExam - Buck ElectronicaLissandro GarciaNo ratings yet
- Final Ramp Generator Using Proteretic Comparator APCCAS 2021Document4 pagesFinal Ramp Generator Using Proteretic Comparator APCCAS 2021ASHFAQ AHMEDNo ratings yet
- Hu Hao Liu Yang Zhang JianhuaDocument8 pagesHu Hao Liu Yang Zhang JianhuaMagraoui AbdelkadirNo ratings yet
- Dynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEDocument6 pagesDynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEFelix GamarraNo ratings yet
- Control of Variable-Speed Type Wind Turbines Using Direct Power Control Space Vector Modulated 3-Level PWM ConverterDocument6 pagesControl of Variable-Speed Type Wind Turbines Using Direct Power Control Space Vector Modulated 3-Level PWM ConverterElectrical ControlNo ratings yet
- Observability and Sliding Mode Observer Design For Multi-Cell Series ConverterDocument6 pagesObservability and Sliding Mode Observer Design For Multi-Cell Series ConverterSana OthmanNo ratings yet
- SC AC Simulation PDFDocument5 pagesSC AC Simulation PDFuam22No ratings yet
- Finite-States Model Predictive Control of A Four-Level Diode-Clamped InverterDocument6 pagesFinite-States Model Predictive Control of A Four-Level Diode-Clamped Inverterchikha saidNo ratings yet
- Modelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Document30 pagesModelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Daniel ManjarresNo ratings yet
- Modeling, Control and Simulation of A Chain Link Statcom in Emtp-RvDocument8 pagesModeling, Control and Simulation of A Chain Link Statcom in Emtp-RvBožidar Filipović-GrčićNo ratings yet
- Current-Sensorless Predictive Control For DC-DC ConvertersDocument6 pagesCurrent-Sensorless Predictive Control For DC-DC ConvertersKannan KochumonNo ratings yet
- L6565 Quasi-Resonant Controller: November 2002Document35 pagesL6565 Quasi-Resonant Controller: November 2002Alberto MontillaNo ratings yet
- Application of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemDocument12 pagesApplication of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemZikra ElninoNo ratings yet
- Power Supplies With Synchronous Rectification For Computer and Communication SystemsDocument6 pagesPower Supplies With Synchronous Rectification For Computer and Communication SystemsALHOSNI90No ratings yet
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDocument6 pagesZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- Prieto Araujo2016Document11 pagesPrieto Araujo2016clear skyNo ratings yet
- Detailed Notes: IC Fabrication ProcessDocument81 pagesDetailed Notes: IC Fabrication ProcessimmadiuttejNo ratings yet
- Direct Fuzzy Logic Controller For Voltage Control of Standalone Three Phase InverterDocument4 pagesDirect Fuzzy Logic Controller For Voltage Control of Standalone Three Phase Inverterdckien2002No ratings yet
- Modelling and Regulation of Dual-Output LCLC Resonant ConvertersDocument6 pagesModelling and Regulation of Dual-Output LCLC Resonant Convertersbacuoc.nguyen356No ratings yet
- Generalized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevDocument5 pagesGeneralized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevVenkatesan SwamyNo ratings yet
- L6565 Quasi-Resonant ControllerDocument28 pagesL6565 Quasi-Resonant ControllerboipouNo ratings yet
- High-Voltage Direct Current Technology - Part 1 R1Document36 pagesHigh-Voltage Direct Current Technology - Part 1 R1Golden DaisyNo ratings yet
- 2016 Ch4-DelayDocument31 pages2016 Ch4-Delayជើងកាង ភូមិNo ratings yet
- A Design Methodology of Resonant LLC DC-DC ConverterDocument10 pagesA Design Methodology of Resonant LLC DC-DC ConverterArsalan AtharNo ratings yet
- Ch05 5 PDFDocument36 pagesCh05 5 PDFSabri BouloumaNo ratings yet
- Characterization of CDV/DT Induced Power Loss in Synchronous Buck DC-DC ConvertersDocument6 pagesCharacterization of CDV/DT Induced Power Loss in Synchronous Buck DC-DC Convertersmhd ali mustofah nstNo ratings yet
- Analytic Models of CMOS Logic in Various Regimes: Branko Dokić, Tatjana Pešić-Brđanin, Radoš DabićDocument22 pagesAnalytic Models of CMOS Logic in Various Regimes: Branko Dokić, Tatjana Pešić-Brđanin, Radoš DabićsimoNo ratings yet
- Fast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitiesDocument14 pagesFast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitieshakikNo ratings yet
- Generalized Average Modeling of Dual ActiveDocument7 pagesGeneralized Average Modeling of Dual ActiveHarsh ChittoraNo ratings yet
- Power Losses in MOSFET Switch of Quasi-Resonant Pulse Converter With Series Resonant CircuitDocument6 pagesPower Losses in MOSFET Switch of Quasi-Resonant Pulse Converter With Series Resonant CircuitBruna RibeiroNo ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- Digitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDocument5 pagesDigitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDipankar Mukherjee100% (1)
- Modeling Front-End Converters: and Control of Three-Phase ActiveDocument6 pagesModeling Front-End Converters: and Control of Three-Phase ActiveAjay BhosaleNo ratings yet
- Real-Time Digital Simulation of A VSC-connected Offshore Wind FarmDocument7 pagesReal-Time Digital Simulation of A VSC-connected Offshore Wind Farmpreeti200726No ratings yet
- Research On Dynamic Model and DecouplingDocument4 pagesResearch On Dynamic Model and DecouplingFelix GamarraNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- Aalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep MDocument7 pagesAalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep Mmarouan86No ratings yet
- G VD Transfer FunctionDocument7 pagesG VD Transfer FunctionSamuel JuradoNo ratings yet
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDocument6 pagesPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoNo ratings yet
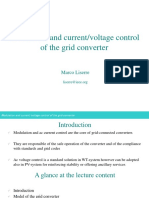
- Modulation and Current/voltage Control of The Grid ConverterDocument49 pagesModulation and Current/voltage Control of The Grid Converterali ghalibNo ratings yet
- Capacitively-Aided Switching Technique For High-Frequency Isolated Bus ConvertersDocument8 pagesCapacitively-Aided Switching Technique For High-Frequency Isolated Bus ConvertersAdam RodriguezNo ratings yet
- (25434292 - Power Electronics and Drives) A MULTILEVEL SWITCHED CAPACITOR DC-DC CONVERTER. AN ANALYSIS OF RESONANT OPERATION CONDITIONSDocument19 pages(25434292 - Power Electronics and Drives) A MULTILEVEL SWITCHED CAPACITOR DC-DC CONVERTER. AN ANALYSIS OF RESONANT OPERATION CONDITIONSClaudiu UdrescuNo ratings yet
- Stability Analysis of Sepic Converter Using Matlab-SimulinkDocument6 pagesStability Analysis of Sepic Converter Using Matlab-SimulinkHilmy AwadNo ratings yet
- Impact of VSC HVDC On AC System GenerationDocument6 pagesImpact of VSC HVDC On AC System GenerationGate PrepNo ratings yet
- L33 ECEN5817 Out1Document14 pagesL33 ECEN5817 Out1djyNo ratings yet
- Nonlinear Control of Boost Ac DC ConvertDocument6 pagesNonlinear Control of Boost Ac DC Convertfh51lv4No ratings yet
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Cascadable Adiabatic Logic Circuits For Low-Power ApplicationsDocument37 pagesCascadable Adiabatic Logic Circuits For Low-Power ApplicationsJesh KakkadNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Lecture 01 PDFDocument23 pagesLecture 01 PDFAbd El-Rahman DabbishNo ratings yet
- EE4271 VLSI Design: The InverterDocument32 pagesEE4271 VLSI Design: The Inverterprakash_shrNo ratings yet
- T S R C: HE Eries Esonant OnverterDocument50 pagesT S R C: HE Eries Esonant OnverterKarthikeyan SaravananNo ratings yet
- Chen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIDocument5 pagesChen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIMumuji BirbNo ratings yet
- Grid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsDocument6 pagesGrid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsAayesha AhmedNo ratings yet
- Combination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversityDocument78 pagesCombination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversitybhawnaNo ratings yet
- Assignment 04 Power ElectronicsDocument3 pagesAssignment 04 Power ElectronicsTayyab Hussain0% (1)
- Final Review PDFDocument19 pagesFinal Review PDFurfriend_jjn05No ratings yet
- A New Hybrid DC Circuit Breaker TopologyDocument8 pagesA New Hybrid DC Circuit Breaker TopologyRanjith GowdaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Optimization of Social Welfare and Transmission Losses in Offshore MTDC Networks Through Multi-Object Genetic AlgorithmDocument8 pagesOptimization of Social Welfare and Transmission Losses in Offshore MTDC Networks Through Multi-Object Genetic AlgorithmRodrigo Teixeira PintoNo ratings yet
- Modular Dynamic Models of Large Offshore Multi-Terminal DC (MTDC) NetworksDocument10 pagesModular Dynamic Models of Large Offshore Multi-Terminal DC (MTDC) NetworksRodrigo Teixeira PintoNo ratings yet
- Offshore Transnational Grids in Europe The North Sea Transnational Grid Research Project in Relation To Other Research InitiativesDocument8 pagesOffshore Transnational Grids in Europe The North Sea Transnational Grid Research Project in Relation To Other Research InitiativesRodrigo Teixeira PintoNo ratings yet
- 2011.08.24 - RTP - Epe2011Document19 pages2011.08.24 - RTP - Epe2011Rodrigo Teixeira PintoNo ratings yet
- Capacitance Cheat CodeDocument13 pagesCapacitance Cheat CodeADITYA UPADHYAYNo ratings yet
- BIG - 3.2 - Market Analysis of The Offshore Wind Energy Transmission Industry - FinalDocument76 pagesBIG - 3.2 - Market Analysis of The Offshore Wind Energy Transmission Industry - FinalwircexdjNo ratings yet
- Rabaey Dig ElectronicsDocument4 pagesRabaey Dig ElectronicsRahul AgarwalNo ratings yet
- Power BillDocument1 pagePower BillMahesh NukalaNo ratings yet
- Deliverable SDocument3 pagesDeliverable SVikas PhatakNo ratings yet
- RGA5467EXADocument2 pagesRGA5467EXAEliel SouzaNo ratings yet
- Honeywell: Fan Speed SelectorDocument2 pagesHoneywell: Fan Speed SelectorMarco ReNo ratings yet
- Single Line DiagramDocument6 pagesSingle Line DiagramAnonymous dEFP1VKGJSNo ratings yet
- Grounding Ground Fault ProtectionDocument35 pagesGrounding Ground Fault ProtectionlivespiveNo ratings yet
- 1756 Ib32Document16 pages1756 Ib32Daniel BacicNo ratings yet
- Fs 7 UmDocument4 pagesFs 7 UmTanvir Jaan KhokhrNo ratings yet
- Single Phase UPS: Pulsar MXDocument2 pagesSingle Phase UPS: Pulsar MXAmper ProiectNo ratings yet
- Cropped - Industrial Investment Opportunities in SECDocument94 pagesCropped - Industrial Investment Opportunities in SECAmin AzadNo ratings yet
- Hipot TestDocument5 pagesHipot TestSanjeet Saud100% (2)
- S100-NF, S100-GF: Ratings and SpecificationsDocument2 pagesS100-NF, S100-GF: Ratings and SpecificationsHenry RosaNo ratings yet
- Karta - FTL33Document36 pagesKarta - FTL33Adam MazurekNo ratings yet
- Hettich - Error CodesDocument4 pagesHettich - Error CodesDENISJUSTINIANONo ratings yet
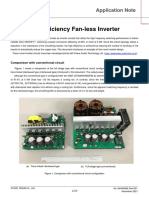
- 5kw Inverter Efficiency An eDocument21 pages5kw Inverter Efficiency An eguarilhaeduNo ratings yet
- SKU SRV2KI CopiarDocument3 pagesSKU SRV2KI Copiarluisoft88No ratings yet
- NYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1Document1 pageNYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1eplan drawingsNo ratings yet
- Kangan Report.-Converted RX5Document28 pagesKangan Report.-Converted RX5Shah Uzma100% (1)
- Development of Adaptive Perturb and Observe Technique For Global Maximum Power Point TrackingDocument8 pagesDevelopment of Adaptive Perturb and Observe Technique For Global Maximum Power Point TrackingSakthi NathanNo ratings yet
- Solar CarDocument20 pagesSolar CarVaibhav Taware83% (6)
- Plant Shutdown ProcedureDocument2 pagesPlant Shutdown ProceduretomiNo ratings yet
- Akshay Pal Singh DuggalDocument2 pagesAkshay Pal Singh DuggalAkshay DuggalNo ratings yet
- 135-h MG-07 PDFDocument9 pages135-h MG-07 PDFrafasel otubo guatiaNo ratings yet
- Magnetic ContactorDocument6 pagesMagnetic ContactorChristine TanNo ratings yet
- Power FlowsDocument42 pagesPower FlowsRaturi DeepankarNo ratings yet
- Ee 546 Lecture 1Document11 pagesEe 546 Lecture 1souleyman hassanNo ratings yet



























































































Download as pdf or txt
You might also like
- Exam - Buck ElectronicaDocument15 pagesExam - Buck ElectronicaLissandro GarciaNo ratings yet
- Final Ramp Generator Using Proteretic Comparator APCCAS 2021Document4 pagesFinal Ramp Generator Using Proteretic Comparator APCCAS 2021ASHFAQ AHMEDNo ratings yet
- Hu Hao Liu Yang Zhang JianhuaDocument8 pagesHu Hao Liu Yang Zhang JianhuaMagraoui AbdelkadirNo ratings yet
- Dynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEDocument6 pagesDynamic Modeling of A VSC-HVDC Converter: Markus Imhof, Student Member, IEEE, G Oran Andersson, Fellow, IEEEFelix GamarraNo ratings yet
- Control of Variable-Speed Type Wind Turbines Using Direct Power Control Space Vector Modulated 3-Level PWM ConverterDocument6 pagesControl of Variable-Speed Type Wind Turbines Using Direct Power Control Space Vector Modulated 3-Level PWM ConverterElectrical ControlNo ratings yet
- Observability and Sliding Mode Observer Design For Multi-Cell Series ConverterDocument6 pagesObservability and Sliding Mode Observer Design For Multi-Cell Series ConverterSana OthmanNo ratings yet
- SC AC Simulation PDFDocument5 pagesSC AC Simulation PDFuam22No ratings yet
- Finite-States Model Predictive Control of A Four-Level Diode-Clamped InverterDocument6 pagesFinite-States Model Predictive Control of A Four-Level Diode-Clamped Inverterchikha saidNo ratings yet
- Modelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Document30 pagesModelling and Simulation of Power Electronic Converter Dominated Power Systems in PowerFactory-45-74Daniel ManjarresNo ratings yet
- Modeling, Control and Simulation of A Chain Link Statcom in Emtp-RvDocument8 pagesModeling, Control and Simulation of A Chain Link Statcom in Emtp-RvBožidar Filipović-GrčićNo ratings yet
- Current-Sensorless Predictive Control For DC-DC ConvertersDocument6 pagesCurrent-Sensorless Predictive Control For DC-DC ConvertersKannan KochumonNo ratings yet
- L6565 Quasi-Resonant Controller: November 2002Document35 pagesL6565 Quasi-Resonant Controller: November 2002Alberto MontillaNo ratings yet
- Application of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemDocument12 pagesApplication of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemZikra ElninoNo ratings yet
- Power Supplies With Synchronous Rectification For Computer and Communication SystemsDocument6 pagesPower Supplies With Synchronous Rectification For Computer and Communication SystemsALHOSNI90No ratings yet
- ZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterDocument6 pagesZVS-ZCS Bidirectional Full-Bridge DC-DC ConverterPradhapndk100% (1)
- Prieto Araujo2016Document11 pagesPrieto Araujo2016clear skyNo ratings yet
- Detailed Notes: IC Fabrication ProcessDocument81 pagesDetailed Notes: IC Fabrication ProcessimmadiuttejNo ratings yet
- Direct Fuzzy Logic Controller For Voltage Control of Standalone Three Phase InverterDocument4 pagesDirect Fuzzy Logic Controller For Voltage Control of Standalone Three Phase Inverterdckien2002No ratings yet
- Modelling and Regulation of Dual-Output LCLC Resonant ConvertersDocument6 pagesModelling and Regulation of Dual-Output LCLC Resonant Convertersbacuoc.nguyen356No ratings yet
- Generalized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevDocument5 pagesGeneralized Model of A Bidirectional DC-DC Converter: Nikolay Hinov, Dimitar Arnaudov and Dimitar PenevVenkatesan SwamyNo ratings yet
- L6565 Quasi-Resonant ControllerDocument28 pagesL6565 Quasi-Resonant ControllerboipouNo ratings yet
- High-Voltage Direct Current Technology - Part 1 R1Document36 pagesHigh-Voltage Direct Current Technology - Part 1 R1Golden DaisyNo ratings yet
- 2016 Ch4-DelayDocument31 pages2016 Ch4-Delayជើងកាង ភូមិNo ratings yet
- A Design Methodology of Resonant LLC DC-DC ConverterDocument10 pagesA Design Methodology of Resonant LLC DC-DC ConverterArsalan AtharNo ratings yet
- Ch05 5 PDFDocument36 pagesCh05 5 PDFSabri BouloumaNo ratings yet
- Characterization of CDV/DT Induced Power Loss in Synchronous Buck DC-DC ConvertersDocument6 pagesCharacterization of CDV/DT Induced Power Loss in Synchronous Buck DC-DC Convertersmhd ali mustofah nstNo ratings yet
- Analytic Models of CMOS Logic in Various Regimes: Branko Dokić, Tatjana Pešić-Brđanin, Radoš DabićDocument22 pagesAnalytic Models of CMOS Logic in Various Regimes: Branko Dokić, Tatjana Pešić-Brđanin, Radoš DabićsimoNo ratings yet
- Fast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitiesDocument14 pagesFast-Scale Bifurcation in Power-Factor-Correction Buck-Boost Converters and Eects of Incompatible PeriodicitieshakikNo ratings yet
- Generalized Average Modeling of Dual ActiveDocument7 pagesGeneralized Average Modeling of Dual ActiveHarsh ChittoraNo ratings yet
- Power Losses in MOSFET Switch of Quasi-Resonant Pulse Converter With Series Resonant CircuitDocument6 pagesPower Losses in MOSFET Switch of Quasi-Resonant Pulse Converter With Series Resonant CircuitBruna RibeiroNo ratings yet
- Ioc DT P 2004 22Document14 pagesIoc DT P 2004 22api-27199346No ratings yet
- Digitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDocument5 pagesDigitally Controlled Interface Between Supercapacitor Energy Storage and DC LinkDipankar Mukherjee100% (1)
- Modeling Front-End Converters: and Control of Three-Phase ActiveDocument6 pagesModeling Front-End Converters: and Control of Three-Phase ActiveAjay BhosaleNo ratings yet
- Real-Time Digital Simulation of A VSC-connected Offshore Wind FarmDocument7 pagesReal-Time Digital Simulation of A VSC-connected Offshore Wind Farmpreeti200726No ratings yet
- Research On Dynamic Model and DecouplingDocument4 pagesResearch On Dynamic Model and DecouplingFelix GamarraNo ratings yet
- Exp. 4, Part 2: Converter Transfer FunctionsDocument41 pagesExp. 4, Part 2: Converter Transfer FunctionsMiyuki KazuyaNo ratings yet
- Small-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterDocument7 pagesSmall-Signal Model of A 5kW High-Output Voltage Capacitive-Loaded Series-Parallel Resonant DC-DC ConverterAshok KumarNo ratings yet
- Aalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep MDocument7 pagesAalborg Universitet: Micallef, Alexander Apap, Maurice Spiteri-Staines, Cyril Guerrero, Josep Mmarouan86No ratings yet
- G VD Transfer FunctionDocument7 pagesG VD Transfer FunctionSamuel JuradoNo ratings yet
- Power Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsDocument6 pagesPower Fluctuation Alleviation Using Cascade Statcoms With Energy Storages For Wind Farm ApplicationsjoNo ratings yet
- Modulation and Current/voltage Control of The Grid ConverterDocument49 pagesModulation and Current/voltage Control of The Grid Converterali ghalibNo ratings yet
- Capacitively-Aided Switching Technique For High-Frequency Isolated Bus ConvertersDocument8 pagesCapacitively-Aided Switching Technique For High-Frequency Isolated Bus ConvertersAdam RodriguezNo ratings yet
- (25434292 - Power Electronics and Drives) A MULTILEVEL SWITCHED CAPACITOR DC-DC CONVERTER. AN ANALYSIS OF RESONANT OPERATION CONDITIONSDocument19 pages(25434292 - Power Electronics and Drives) A MULTILEVEL SWITCHED CAPACITOR DC-DC CONVERTER. AN ANALYSIS OF RESONANT OPERATION CONDITIONSClaudiu UdrescuNo ratings yet
- Stability Analysis of Sepic Converter Using Matlab-SimulinkDocument6 pagesStability Analysis of Sepic Converter Using Matlab-SimulinkHilmy AwadNo ratings yet
- Impact of VSC HVDC On AC System GenerationDocument6 pagesImpact of VSC HVDC On AC System GenerationGate PrepNo ratings yet
- L33 ECEN5817 Out1Document14 pagesL33 ECEN5817 Out1djyNo ratings yet
- Nonlinear Control of Boost Ac DC ConvertDocument6 pagesNonlinear Control of Boost Ac DC Convertfh51lv4No ratings yet
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Cascadable Adiabatic Logic Circuits For Low-Power ApplicationsDocument37 pagesCascadable Adiabatic Logic Circuits For Low-Power ApplicationsJesh KakkadNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Lecture 01 PDFDocument23 pagesLecture 01 PDFAbd El-Rahman DabbishNo ratings yet
- EE4271 VLSI Design: The InverterDocument32 pagesEE4271 VLSI Design: The Inverterprakash_shrNo ratings yet
- T S R C: HE Eries Esonant OnverterDocument50 pagesT S R C: HE Eries Esonant OnverterKarthikeyan SaravananNo ratings yet
- Chen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIDocument5 pagesChen Zhang, Xi-Ran ZHANG, Wei ZHU, Hui ZHONG and Yu SHIMumuji BirbNo ratings yet
- Grid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsDocument6 pagesGrid-Connected Three-Phase Inverter System With LCL Filter Model Control and Experimental ResultsAayesha AhmedNo ratings yet
- Combination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversityDocument78 pagesCombination Logic Design: Pradondet Nilagupta Pom@ku - Ac.th Department of Computer Engineering Kasetsart UniversitybhawnaNo ratings yet
- Assignment 04 Power ElectronicsDocument3 pagesAssignment 04 Power ElectronicsTayyab Hussain0% (1)
- Final Review PDFDocument19 pagesFinal Review PDFurfriend_jjn05No ratings yet
- A New Hybrid DC Circuit Breaker TopologyDocument8 pagesA New Hybrid DC Circuit Breaker TopologyRanjith GowdaNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Optimization of Social Welfare and Transmission Losses in Offshore MTDC Networks Through Multi-Object Genetic AlgorithmDocument8 pagesOptimization of Social Welfare and Transmission Losses in Offshore MTDC Networks Through Multi-Object Genetic AlgorithmRodrigo Teixeira PintoNo ratings yet
- Modular Dynamic Models of Large Offshore Multi-Terminal DC (MTDC) NetworksDocument10 pagesModular Dynamic Models of Large Offshore Multi-Terminal DC (MTDC) NetworksRodrigo Teixeira PintoNo ratings yet
- Offshore Transnational Grids in Europe The North Sea Transnational Grid Research Project in Relation To Other Research InitiativesDocument8 pagesOffshore Transnational Grids in Europe The North Sea Transnational Grid Research Project in Relation To Other Research InitiativesRodrigo Teixeira PintoNo ratings yet
- 2011.08.24 - RTP - Epe2011Document19 pages2011.08.24 - RTP - Epe2011Rodrigo Teixeira PintoNo ratings yet
- Capacitance Cheat CodeDocument13 pagesCapacitance Cheat CodeADITYA UPADHYAYNo ratings yet
- BIG - 3.2 - Market Analysis of The Offshore Wind Energy Transmission Industry - FinalDocument76 pagesBIG - 3.2 - Market Analysis of The Offshore Wind Energy Transmission Industry - FinalwircexdjNo ratings yet
- Rabaey Dig ElectronicsDocument4 pagesRabaey Dig ElectronicsRahul AgarwalNo ratings yet
- Power BillDocument1 pagePower BillMahesh NukalaNo ratings yet
- Deliverable SDocument3 pagesDeliverable SVikas PhatakNo ratings yet
- RGA5467EXADocument2 pagesRGA5467EXAEliel SouzaNo ratings yet
- Honeywell: Fan Speed SelectorDocument2 pagesHoneywell: Fan Speed SelectorMarco ReNo ratings yet
- Single Line DiagramDocument6 pagesSingle Line DiagramAnonymous dEFP1VKGJSNo ratings yet
- Grounding Ground Fault ProtectionDocument35 pagesGrounding Ground Fault ProtectionlivespiveNo ratings yet
- 1756 Ib32Document16 pages1756 Ib32Daniel BacicNo ratings yet
- Fs 7 UmDocument4 pagesFs 7 UmTanvir Jaan KhokhrNo ratings yet
- Single Phase UPS: Pulsar MXDocument2 pagesSingle Phase UPS: Pulsar MXAmper ProiectNo ratings yet
- Cropped - Industrial Investment Opportunities in SECDocument94 pagesCropped - Industrial Investment Opportunities in SECAmin AzadNo ratings yet
- Hipot TestDocument5 pagesHipot TestSanjeet Saud100% (2)
- S100-NF, S100-GF: Ratings and SpecificationsDocument2 pagesS100-NF, S100-GF: Ratings and SpecificationsHenry RosaNo ratings yet
- Karta - FTL33Document36 pagesKarta - FTL33Adam MazurekNo ratings yet
- Hettich - Error CodesDocument4 pagesHettich - Error CodesDENISJUSTINIANONo ratings yet
- 5kw Inverter Efficiency An eDocument21 pages5kw Inverter Efficiency An eguarilhaeduNo ratings yet
- SKU SRV2KI CopiarDocument3 pagesSKU SRV2KI Copiarluisoft88No ratings yet
- NYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1Document1 pageNYY-J, O 0,6/1kV: VDE 0276-603, VDE 0276-627, IEC 60502-1eplan drawingsNo ratings yet
- Kangan Report.-Converted RX5Document28 pagesKangan Report.-Converted RX5Shah Uzma100% (1)
- Development of Adaptive Perturb and Observe Technique For Global Maximum Power Point TrackingDocument8 pagesDevelopment of Adaptive Perturb and Observe Technique For Global Maximum Power Point TrackingSakthi NathanNo ratings yet
- Solar CarDocument20 pagesSolar CarVaibhav Taware83% (6)
- Plant Shutdown ProcedureDocument2 pagesPlant Shutdown ProceduretomiNo ratings yet
- Akshay Pal Singh DuggalDocument2 pagesAkshay Pal Singh DuggalAkshay DuggalNo ratings yet
- 135-h MG-07 PDFDocument9 pages135-h MG-07 PDFrafasel otubo guatiaNo ratings yet
- Magnetic ContactorDocument6 pagesMagnetic ContactorChristine TanNo ratings yet
- Power FlowsDocument42 pagesPower FlowsRaturi DeepankarNo ratings yet
- Ee 546 Lecture 1Document11 pagesEe 546 Lecture 1souleyman hassanNo ratings yet