Download as pdf or txt
You might also like
- TG-8100 ManualDocument82 pagesTG-8100 ManualDaulet TuszhanNo ratings yet
- IM KR180A E 4thDocument80 pagesIM KR180A E 4thbatizap batizapNo ratings yet
- Qinetiq: Certificate of Type ApprovalDocument4 pagesQinetiq: Certificate of Type Approvalcem100% (1)
- D2370721 - 002 SGRE ON SG 6.0-170 Foundation Loads T115-50ADocument11 pagesD2370721 - 002 SGRE ON SG 6.0-170 Foundation Loads T115-50AMarcelo Gonçalves100% (1)
- Actros MPII-Basic TrainingDocument284 pagesActros MPII-Basic Trainingabdulrahman elsaied100% (10)
- Report On Survey of Gmdss Radio InstallationsDocument17 pagesReport On Survey of Gmdss Radio Installationsajayi100% (1)
- CMZ900S PDFDocument11 pagesCMZ900S PDFPhuoc Ho NguyenNo ratings yet
- Sailor Products Cross Ref List PDFDocument6 pagesSailor Products Cross Ref List PDFMatheus JustinoNo ratings yet
- TG 8000 GYRO ChecklistDocument3 pagesTG 8000 GYRO ChecklistNishant Pandya0% (1)
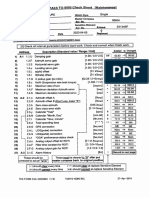
- TG-8000 Check Sheet (MAINTENANCE)Document3 pagesTG-8000 Check Sheet (MAINTENANCE)REY JESUS HERNANDEZ JIMENEZ100% (1)
- DSAS Mk2 Hardware Specification: Ssas Alert AdvancedDocument2 pagesDSAS Mk2 Hardware Specification: Ssas Alert Advancedmehdi moghimiNo ratings yet
- F77F55 Installation ManualDocument144 pagesF77F55 Installation ManualAndrey PonomarenkoNo ratings yet
- CSC 03 Seafarers Medical Examination FormDocument2 pagesCSC 03 Seafarers Medical Examination FormAndrew BedwinNo ratings yet
- YOKOGAWA CMZ700 OverhaulDocument35 pagesYOKOGAWA CMZ700 OverhaulHardik NandaNo ratings yet
- FR2105-B Series Operator's ManualDocument197 pagesFR2105-B Series Operator's ManualmarcelgarrigaNo ratings yet
- Kelvin HughesDocument4 pagesKelvin HughesDaniel NaVa RNo ratings yet
- Dsas Diagnostic Checklist: Vessel Name DSAS Serial NumberDocument4 pagesDsas Diagnostic Checklist: Vessel Name DSAS Serial Number20180801458 SahrudinNo ratings yet
- Chapter 1-INTRODUCTION 1 GMDSSDocument31 pagesChapter 1-INTRODUCTION 1 GMDSSmendes100% (1)
- Guidelines On Annual Testing of Voyage Data Recorders (VDR) and Simplified Voyage Data Recorders (S-VDR)Document7 pagesGuidelines On Annual Testing of Voyage Data Recorders (VDR) and Simplified Voyage Data Recorders (S-VDR)Lucas BarriosNo ratings yet
- Emergency Position-Indicating Radio Beacon (EPIRB)Document19 pagesEmergency Position-Indicating Radio Beacon (EPIRB)Riya NnaNo ratings yet
- JD 1354 15 eDocument6 pagesJD 1354 15 eKuang Ah HockNo ratings yet
- Furuno GPS GP-170 - EDocument2 pagesFuruno GPS GP-170 - EMuhammad Afdhal SyukriNo ratings yet
- JHS 182Document137 pagesJHS 182harbhajan singhNo ratings yet
- VR2272B SVDR Operating Manual AMI Iss 04Document18 pagesVR2272B SVDR Operating Manual AMI Iss 04GMNo ratings yet
- Chartworld Eglobe G2: We Hereby Certify ThatDocument1 pageChartworld Eglobe G2: We Hereby Certify ThatAung KyawNo ratings yet
- Galley Cooking Plate Futura - rp4Document43 pagesGalley Cooking Plate Futura - rp4jarek100% (1)
- Skanti TRP 1000 Series Operators ManualDocument28 pagesSkanti TRP 1000 Series Operators ManualLloyd Briones Panaligan100% (1)
- SAILOR H4122 Iridium Ship Security Alert System: User & Installation ManualDocument20 pagesSAILOR H4122 Iridium Ship Security Alert System: User & Installation ManualParul MehtaNo ratings yet
- DGSCircular 07 of 2022Document3 pagesDGSCircular 07 of 2022Shaik KamaluddinNo ratings yet
- Inmarsat C LES 2019Document1 pageInmarsat C LES 2019lucas barriosNo ratings yet
- Sailor: TT-3000LRIT Mini-C Installation ManualDocument35 pagesSailor: TT-3000LRIT Mini-C Installation ManualTháiMinhQuânNo ratings yet
- SAILOR 5080 AC Power Supply: Installation ManualDocument16 pagesSAILOR 5080 AC Power Supply: Installation Manual'Egemen KayaNo ratings yet
- Mackay Marine MacGregor Interschalt VDR G4e S VDR G4e - Brochure 10 17Document12 pagesMackay Marine MacGregor Interschalt VDR G4e S VDR G4e - Brochure 10 17hassa wadiNo ratings yet
- KH2063 EcdisDocument155 pagesKH2063 EcdisVishwas Maritronics100% (1)
- 162-CompSat JRC JLR-21-31 MED-B Certificate THD 5-3-2021Document4 pages162-CompSat JRC JLR-21-31 MED-B Certificate THD 5-3-2021MarcoNo ratings yet
- Manual: Simrad Panorama Mk2 Rudder Angle IndicatorDocument25 pagesManual: Simrad Panorama Mk2 Rudder Angle IndicatoraaaguilarmNo ratings yet
- 40-40I Flame DetectorDocument2 pages40-40I Flame DetectorSumeet Sisir SarkarNo ratings yet
- 190-ECDIS JRC JAN-7201-9201 QuickRef Manual 1-8-2017 PDFDocument52 pages190-ECDIS JRC JAN-7201-9201 QuickRef Manual 1-8-2017 PDFOğuzhan YıldızNo ratings yet
- 2827 PDFDocument299 pages2827 PDFal nakheel electronicsNo ratings yet
- MR-1210R™ MR-1210T™ MR-1210T: Instruction ManualDocument80 pagesMR-1210R™ MR-1210T™ MR-1210T: Instruction ManualTrung Vũ100% (1)
- KTN-70A OME Rev01 PDFDocument66 pagesKTN-70A OME Rev01 PDFZakaria ChowdhuryNo ratings yet
- GS PT500 E 3rd PDFDocument7 pagesGS PT500 E 3rd PDFvipin2511100% (1)
- Confi Guration Guide: Thrane & Thrane TT-3000SSA September 30th 2004Document8 pagesConfi Guration Guide: Thrane & Thrane TT-3000SSA September 30th 2004nzmrsNo ratings yet
- STD20 SmeDocument101 pagesSTD20 SmeRomeish KelaartNo ratings yet
- Technical Notification: H4122 - Iridium SSAS BoxDocument2 pagesTechnical Notification: H4122 - Iridium SSAS BoxParul MehtaNo ratings yet
- Navtex-JRC Ncr-333 User ManualDocument136 pagesNavtex-JRC Ncr-333 User ManualOrhan SadNo ratings yet
- Pages 501-600 From FAR2XX7 - SvcManDocument100 pagesPages 501-600 From FAR2XX7 - SvcManornardys PenicheNo ratings yet
- Tron Tr30 Gmdss Radio v10Document4 pagesTron Tr30 Gmdss Radio v10jonas molNo ratings yet
- Sailor 7222 VHF DSC Class A: When Connection MattersDocument16 pagesSailor 7222 VHF DSC Class A: When Connection MattersHrishikesh SinghNo ratings yet
- King SeiresDocument2 pagesKing SeiresH_AbdelMeguidNo ratings yet
- SBM Sheet Epirb 961374Document1 pageSBM Sheet Epirb 961374QooNo ratings yet
- M1832 1932 1942 Sme-ADocument96 pagesM1832 1932 1942 Sme-Azied nasriNo ratings yet
- Xantic Short Access CodesDocument3 pagesXantic Short Access CodesShobiniNo ratings yet
- Display Unit Sailor-6310-User-Manual MF HFDocument51 pagesDisplay Unit Sailor-6310-User-Manual MF HFPrinceBabuNo ratings yet
- FCV585 FCV620 Operator's Manual eDocument56 pagesFCV585 FCV620 Operator's Manual eTran_Manh_Trun_7237No ratings yet
- TG8000 Mainte ChecklistDocument12 pagesTG8000 Mainte ChecklistRoy johnsonNo ratings yet
- TG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Document12 pagesTG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Al NakheelElectronicsNo ratings yet
- Wisco Adventure - Ani GyroDocument2 pagesWisco Adventure - Ani Gyroshaikh junaidNo ratings yet
- Report DLD SaDocument18 pagesReport DLD SaHarsh ModiNo ratings yet
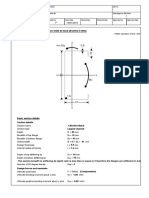
- Y +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Document4 pagesY +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Pavan Poreyana BalakrishnaNo ratings yet
- Group ADocument2 pagesGroup ASomnath PalNo ratings yet
- Price Schedule (Vol-3)Document3 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- 4 Adc/8 Dac With PLL, 192 KHZ, 24-Bit Codec Ad1939: Features General DescriptionDocument32 pages4 Adc/8 Dac With PLL, 192 KHZ, 24-Bit Codec Ad1939: Features General Descriptionsuan kwang TanNo ratings yet
- Paper Chromatography: A Review: Mukta Gupta, Bhupinder Kapoor, Reena GuptaDocument8 pagesPaper Chromatography: A Review: Mukta Gupta, Bhupinder Kapoor, Reena GuptaYonas AlexandryNo ratings yet
- A90ad2d3 1641353182028Document50 pagesA90ad2d3 1641353182028Akshay GuptaNo ratings yet
- Information Technology Infrastructure Library (ITIL)Document42 pagesInformation Technology Infrastructure Library (ITIL)aftershow76No ratings yet
- Paper 1 SPM 2004Document4 pagesPaper 1 SPM 2004Marsilah Anum MarhamNo ratings yet
- AP Chem Syllabus 2021-2022Document2 pagesAP Chem Syllabus 2021-2022Urvi MohanNo ratings yet
- St. Raphaela Mary School: 1 Quarterly Examination in Mathematics 7 Teacher: Ma'am Henesy AntonioDocument2 pagesSt. Raphaela Mary School: 1 Quarterly Examination in Mathematics 7 Teacher: Ma'am Henesy AntonioRezaej BiliranNo ratings yet
- Transmission Electron MicrosDocument97 pagesTransmission Electron MicrosAnonymous 0tqzNTWyyNo ratings yet
- Tunnel PDFDocument128 pagesTunnel PDFAshwini ThakurNo ratings yet
- DMT 231 Analogue Electronics: Introduction To Field Effect TransistorsDocument28 pagesDMT 231 Analogue Electronics: Introduction To Field Effect TransistorsAmriNo ratings yet
- 3D TransformationDocument73 pages3D TransformationEr RishabNo ratings yet
- Personality Traits of College Students in Emilio Aguinaldo CollegeDocument47 pagesPersonality Traits of College Students in Emilio Aguinaldo CollegeKassandra Fermano100% (1)
- Nfpa 13 Sprinkler DesignDocument42 pagesNfpa 13 Sprinkler Designdaves guron0% (1)
- ButterflyMX - Elevator Control Wiring DiagramDocument1 pageButterflyMX - Elevator Control Wiring DiagramSyed iliyasNo ratings yet
- Grade 4 Ps Elans 18 ItemsDocument3 pagesGrade 4 Ps Elans 18 ItemsFritz BalasabasNo ratings yet
- 3300 SystemGuides TecHandBook 5.0Document432 pages3300 SystemGuides TecHandBook 5.0GuillaumeBeauchamp100% (1)
- Improper Rotation: 1 Three DimensionsDocument3 pagesImproper Rotation: 1 Three DimensionsManuel MensaNo ratings yet
- LEcture 14Document15 pagesLEcture 14asdsdNo ratings yet
- TCP Congestion Control: Algorithms and Analysis: Try Homework Problem atDocument34 pagesTCP Congestion Control: Algorithms and Analysis: Try Homework Problem atZdzisław PuchatyNo ratings yet
- Free Training On Liquified Natural Gas 2Document4 pagesFree Training On Liquified Natural Gas 2CilliaNo ratings yet
- CHPT 12.2 PowerpointDocument62 pagesCHPT 12.2 PowerpointA ANo ratings yet
- 2105 - Solutions - Neet - Enthuse - I - Mt-2 - 1950cmd303021230004-AllenDocument5 pages2105 - Solutions - Neet - Enthuse - I - Mt-2 - 1950cmd303021230004-AllenNita GosaviNo ratings yet
- General Relativity, Black Holes, and CosmologyDocument432 pagesGeneral Relativity, Black Holes, and CosmologyDaniel Ponce MartinezNo ratings yet
- VCTDS 02959 enDocument12 pagesVCTDS 02959 enDenis OrlandiNo ratings yet
- Bahir Dar University 1Document7 pagesBahir Dar University 1Anonymous QvkcpUeUcJNo ratings yet
- Nano Atomic Bit ProcessingDocument296 pagesNano Atomic Bit ProcessingtrineshNo ratings yet
- Computer NetworksDocument623 pagesComputer NetworksjvNo ratings yet
- Signals and SystemsDocument15 pagesSignals and SystemsAryan VermaNo ratings yet