
1 s2.0 S0951832023002272 Main
1 s2.0 S0951832023002272 Main
You might also like
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Free Templates To: Respond To Hotel ReviewsDocument17 pagesFree Templates To: Respond To Hotel ReviewsThanh TK Vu0% (1)
- A Comprehensive Power Loss, Efficiency, Reliability and Cost Calculation of A 1 MW/500 KWH Battery Based Energy Storage System For Frequency Regulation ApplicationDocument12 pagesA Comprehensive Power Loss, Efficiency, Reliability and Cost Calculation of A 1 MW/500 KWH Battery Based Energy Storage System For Frequency Regulation ApplicationGerson ChavarriaNo ratings yet
- Predictive Maintenance Strategy Based On Disturbance RecordersDocument7 pagesPredictive Maintenance Strategy Based On Disturbance Recordersintiw_23No ratings yet
- Condition Based MaintenanceDocument12 pagesCondition Based MaintenanceashokparikhNo ratings yet
- 1.3 Optimization - of - Electrical - Distribution DistribuiçãoDocument8 pages1.3 Optimization - of - Electrical - Distribution DistribuiçãoelcarmoNo ratings yet
- 09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEEDocument8 pages09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEElixoshadyNo ratings yet
- An Approach For Condition-Based MaintenanceDocument8 pagesAn Approach For Condition-Based MaintenanceMArceloNo ratings yet
- Reducing Costs by Clustering Maintenance Activities For Multiple Critical UnitsDocument11 pagesReducing Costs by Clustering Maintenance Activities For Multiple Critical Unitspeter.phamNo ratings yet
- 101109TPWRS2004840449Document8 pages101109TPWRS2004840449api-3697505No ratings yet
- Critical Reliability Analysis of Superheater Tubes of Coal Based BoilerDocument7 pagesCritical Reliability Analysis of Superheater Tubes of Coal Based BoilerMaryNo ratings yet
- Predictive Maintenance Management Using Sensor-Based Degradation ModelsDocument10 pagesPredictive Maintenance Management Using Sensor-Based Degradation ModelsyassinebouazziNo ratings yet
- ABB Corporate Research, Germany: N. L. FantanaDocument4 pagesABB Corporate Research, Germany: N. L. FantanaJose ValdiviesoNo ratings yet
- TranslateDocument10 pagesTranslateFarhad BahramiNo ratings yet
- 387 394 Ein 23 2Document8 pages387 394 Ein 23 2tomo tomoNo ratings yet
- ÇıktıDocument20 pagesÇıktıCanan TAYGURTNo ratings yet
- Strategy For End of Life Assessment For High Voltage Circuit BreakersDocument10 pagesStrategy For End of Life Assessment For High Voltage Circuit Breakersmihalcea45No ratings yet
- CIGRE-Ciclo de Vida de InterruptoresDocument8 pagesCIGRE-Ciclo de Vida de InterruptoresRoland AvlsNo ratings yet
- Hilber Et Al. - 2013 - Benefits of Reliability Centred Asset ManagementDocument4 pagesHilber Et Al. - 2013 - Benefits of Reliability Centred Asset ManagementAndrés ZúñigaNo ratings yet
- Condition Based MaintenanceDocument18 pagesCondition Based Maintenancedshalev8694No ratings yet
- Confiabilidad Sistemas de DistribuciónDocument9 pagesConfiabilidad Sistemas de DistribuciónJorgeNo ratings yet
- State Space Models For Condition Monitoring: A Case Study: Diego J. Pedregal, M Carmen CarneroDocument10 pagesState Space Models For Condition Monitoring: A Case Study: Diego J. Pedregal, M Carmen CarneroMohamedBoualilNo ratings yet
- Preventive MaintenanceDocument12 pagesPreventive MaintenanceNguyen Xuan TungNo ratings yet
- Determining The Reliabiity Function of The Thermal Power System in PP Nikola Tesla BDocument10 pagesDetermining The Reliabiity Function of The Thermal Power System in PP Nikola Tesla BSnezana KirinNo ratings yet
- Issues of Reliability and Security in Distributed Autonomous Power SystemsDocument17 pagesIssues of Reliability and Security in Distributed Autonomous Power SystemsHarjit Singh MangatNo ratings yet
- Reliability Centered MaintenanceDocument15 pagesReliability Centered MaintenanceEdmund YoongNo ratings yet
- Articulo de EstudioDocument10 pagesArticulo de EstudioMiyer DíazNo ratings yet
- Reliability Studies Accelerator - Burgazzi-PieriniDocument15 pagesReliability Studies Accelerator - Burgazzi-PieriniKazim RazaNo ratings yet
- RCM Alan PrideDocument16 pagesRCM Alan PrideambuenaflorNo ratings yet
- Impact of CCGT Start-Up Flexibility and Cycling Costs Towards Renewables IntegrationDocument8 pagesImpact of CCGT Start-Up Flexibility and Cycling Costs Towards Renewables Integrationbimbel fawwazNo ratings yet
- Fault Current MitigationDocument74 pagesFault Current Mitigationbaccouchi nasreddineNo ratings yet
- Optimising Safety Relief and Flare SystemsDocument8 pagesOptimising Safety Relief and Flare SystemsJoseph McMullenNo ratings yet
- Artiiculo 13Document16 pagesArtiiculo 13Efrain Parra QuispeNo ratings yet
- Reliability, Availability, and Maintainability: Probability Models For PopulationsDocument8 pagesReliability, Availability, and Maintainability: Probability Models For PopulationsMani KumarNo ratings yet
- 1-S2.0-S0951832023000820-Main-Progrma Mantto CondicDocument11 pages1-S2.0-S0951832023000820-Main-Progrma Mantto CondicJulio Cesar Diaz CaroNo ratings yet
- Optimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringDocument9 pagesOptimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringclarkyeahNo ratings yet
- DC Power Maintenance Strategies For Reliability Battery Power Online 2020 - 348661 - 0Document4 pagesDC Power Maintenance Strategies For Reliability Battery Power Online 2020 - 348661 - 0elsonmilan761No ratings yet
- 02 HyeonminKim PDFDocument16 pages02 HyeonminKim PDFZeeshan TalibNo ratings yet
- RCM in Nuclear Power PlantsDocument13 pagesRCM in Nuclear Power PlantsAmar SaadiNo ratings yet
- State-of-the-Art Predictive Maintenance TechniquesDocument13 pagesState-of-the-Art Predictive Maintenance TechniquesKleber VieiraNo ratings yet
- Confiabilidad 1Document13 pagesConfiabilidad 1Caviedes SierraNo ratings yet
- Determination of The Most Opportune Time For Industrial Circuit Breaker ReplacementDocument12 pagesDetermination of The Most Opportune Time For Industrial Circuit Breaker ReplacementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CIRED2007 0243 PaperDocument4 pagesCIRED2007 0243 Paperlmsp69No ratings yet
- Condition Based Maintenance: Mike Dileo, Charles Manker, and John Cadick, P.E. © 1999 byDocument18 pagesCondition Based Maintenance: Mike Dileo, Charles Manker, and John Cadick, P.E. © 1999 byAna Fiorella PuntoNo ratings yet
- State-Of-The-Art Review On Asset Management Methodologies For Oil-Immersed Power TransformersDocument18 pagesState-Of-The-Art Review On Asset Management Methodologies For Oil-Immersed Power TransformersAdrian SieNo ratings yet
- Maintenance Management of Electrical Equipment Condition Monitoring Based Part 3Document4 pagesMaintenance Management of Electrical Equipment Condition Monitoring Based Part 3at35No ratings yet
- Sensors: Condition Assessment of Industrial Gas Turbine Compressor Using A Drift Soft Sensor Based in AutoencoderDocument14 pagesSensors: Condition Assessment of Industrial Gas Turbine Compressor Using A Drift Soft Sensor Based in AutoencoderMohamed Bin IerousNo ratings yet
- Deepanshi Jaiswal PDFDocument15 pagesDeepanshi Jaiswal PDFDeepanshi JaiswalNo ratings yet
- Operation and Preventive Maintenance of Pressure VesselsDocument13 pagesOperation and Preventive Maintenance of Pressure VesselsbrianNo ratings yet
- RCM in MV SubstationDocument6 pagesRCM in MV SubstationFred KellnerNo ratings yet
- Energies 15 03379Document32 pagesEnergies 15 03379KishoreNo ratings yet
- Ene bv4-05805-v2Document23 pagesEne bv4-05805-v2daveNo ratings yet
- Availability Analysis of Gas TurbinesDocument10 pagesAvailability Analysis of Gas TurbinesEman ZabiNo ratings yet
- Reliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationDocument5 pagesReliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationjudarangocaNo ratings yet
- Power and Reliability Management of Socs: Tajana Simunic Rosing, Kresimir Mihic, Giovanni de Micheli, Fellow IeeeDocument13 pagesPower and Reliability Management of Socs: Tajana Simunic Rosing, Kresimir Mihic, Giovanni de Micheli, Fellow IeeeAnilkumar PatilNo ratings yet
- ConclusionDocument6 pagesConclusionMaria CafeNo ratings yet
- Predictive Maintenance of Maritime Systems: Models and ChallengesDocument10 pagesPredictive Maintenance of Maritime Systems: Models and ChallengesSullivan F'gNo ratings yet
- Paper AM ConferenceDocument7 pagesPaper AM ConferenceKang MaNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Process System Value and Exergoeconomic Performance of Captive Power PlantsFrom EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Detailed Lesson Plan (DLP) Format: Instructional PlanningDocument5 pagesDetailed Lesson Plan (DLP) Format: Instructional PlanningRed Zye UbayNo ratings yet
- Oregano As A Mosquito CoilDocument6 pagesOregano As A Mosquito CoilErin Mullen88% (8)
- D9866 PowerVu Compact Receiver Guide R1 3Document118 pagesD9866 PowerVu Compact Receiver Guide R1 3Federico SosaNo ratings yet
- Mulk Raj Anands Untouchable An Explorationinto Inner SpaceDocument4 pagesMulk Raj Anands Untouchable An Explorationinto Inner SpaceKazi Ayman RAHMANNo ratings yet
- Nets Plans and ElevationsDocument8 pagesNets Plans and ElevationsTravel UnlimitedNo ratings yet
- Implementation of The Contensou-Erismann Model ofDocument12 pagesImplementation of The Contensou-Erismann Model ofJarek PlaszczycaNo ratings yet
- Second Order Differential EquationsDocument8 pagesSecond Order Differential EquationsNico StrachanNo ratings yet
- Mills Harm PrincipleDocument28 pagesMills Harm PrincipleSahil JaybhayNo ratings yet
- Free Download Here: Bhrigu Nandi Nadi PDFDocument2 pagesFree Download Here: Bhrigu Nandi Nadi PDFDd0% (1)
- 140185960-Kerin-Webb-The-Language-Pattern-Bible-Indirect-Hypnotherapy-Patterns - Of-Influence PDFDocument14 pages140185960-Kerin-Webb-The-Language-Pattern-Bible-Indirect-Hypnotherapy-Patterns - Of-Influence PDFbobNo ratings yet
- Space TrussDocument52 pagesSpace TrussUmair RazaNo ratings yet
- 3.2 Tides and PrecessionDocument5 pages3.2 Tides and PrecessionelezabethNo ratings yet
- Indian Dental Students' Vaccination Status, Knowledge, Attitudes, Practices Regarding Hepatitis BDocument5 pagesIndian Dental Students' Vaccination Status, Knowledge, Attitudes, Practices Regarding Hepatitis BDesy JesryantiNo ratings yet
- Accepted Manuscript: Applied Thermal EngineeringDocument24 pagesAccepted Manuscript: Applied Thermal EngineeringSiraj AL sharifNo ratings yet
- Nationalism in The PhilippinesDocument5 pagesNationalism in The PhilippinesShibumi SackiNo ratings yet
- Penngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Document15 pagesPenngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Nur WijayantiNo ratings yet
- Grounding SystemDocument186 pagesGrounding Systemjerry TomasNo ratings yet
- WRM Y8 Student BookDocument637 pagesWRM Y8 Student BookMurali75% (4)
- Week 9Document33 pagesWeek 9notabc gamerNo ratings yet
- Problem Set #4 - Mathematics in Population BiologyDocument14 pagesProblem Set #4 - Mathematics in Population BiologyMario RoseteNo ratings yet
- Bem 102 ModuleDocument20 pagesBem 102 ModuleClarisse MacalintalNo ratings yet
- Components of Project Quality PlanDocument17 pagesComponents of Project Quality PlanEko PrayogiNo ratings yet
- HT QuestionsDocument3 pagesHT QuestionsSanthoshirathnam GunjaNo ratings yet
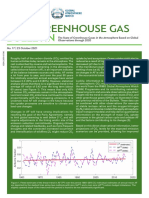
- WMO Greenhouse Gas BulletinDocument10 pagesWMO Greenhouse Gas BulletinWHYY NewsNo ratings yet
- Class VI To X HOLIDAY HOMEWORK 2022-23Document16 pagesClass VI To X HOLIDAY HOMEWORK 2022-23Chiransh GamingNo ratings yet
- Prelim Test RESEARCH 1Document3 pagesPrelim Test RESEARCH 1Christine JadeNo ratings yet
- Quiz - Lab Safety and ApparatusDocument1 pageQuiz - Lab Safety and ApparatusJohn Kristoffer RoblezaNo ratings yet
- Heat and Thermodynamics According To KPK Textbook & Sindh TextbookDocument15 pagesHeat and Thermodynamics According To KPK Textbook & Sindh Textbookswatmiandam44No ratings yet
- Thermodynamics 1 CP04 Assessment - Copy2 PDFDocument2 pagesThermodynamics 1 CP04 Assessment - Copy2 PDFJohn Paul PerezNo ratings yet
























































































Download as pdf or txt
You might also like
- Advanced Temperature Measurement and Control, Second EditionFrom EverandAdvanced Temperature Measurement and Control, Second EditionNo ratings yet
- Free Templates To: Respond To Hotel ReviewsDocument17 pagesFree Templates To: Respond To Hotel ReviewsThanh TK Vu0% (1)
- A Comprehensive Power Loss, Efficiency, Reliability and Cost Calculation of A 1 MW/500 KWH Battery Based Energy Storage System For Frequency Regulation ApplicationDocument12 pagesA Comprehensive Power Loss, Efficiency, Reliability and Cost Calculation of A 1 MW/500 KWH Battery Based Energy Storage System For Frequency Regulation ApplicationGerson ChavarriaNo ratings yet
- Predictive Maintenance Strategy Based On Disturbance RecordersDocument7 pagesPredictive Maintenance Strategy Based On Disturbance Recordersintiw_23No ratings yet
- Condition Based MaintenanceDocument12 pagesCondition Based MaintenanceashokparikhNo ratings yet
- 1.3 Optimization - of - Electrical - Distribution DistribuiçãoDocument8 pages1.3 Optimization - of - Electrical - Distribution DistribuiçãoelcarmoNo ratings yet
- 09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEEDocument8 pages09 GangNiu FrameworkforCostEffectiveandAccurateMaintenance IEEElixoshadyNo ratings yet
- An Approach For Condition-Based MaintenanceDocument8 pagesAn Approach For Condition-Based MaintenanceMArceloNo ratings yet
- Reducing Costs by Clustering Maintenance Activities For Multiple Critical UnitsDocument11 pagesReducing Costs by Clustering Maintenance Activities For Multiple Critical Unitspeter.phamNo ratings yet
- 101109TPWRS2004840449Document8 pages101109TPWRS2004840449api-3697505No ratings yet
- Critical Reliability Analysis of Superheater Tubes of Coal Based BoilerDocument7 pagesCritical Reliability Analysis of Superheater Tubes of Coal Based BoilerMaryNo ratings yet
- Predictive Maintenance Management Using Sensor-Based Degradation ModelsDocument10 pagesPredictive Maintenance Management Using Sensor-Based Degradation ModelsyassinebouazziNo ratings yet
- ABB Corporate Research, Germany: N. L. FantanaDocument4 pagesABB Corporate Research, Germany: N. L. FantanaJose ValdiviesoNo ratings yet
- TranslateDocument10 pagesTranslateFarhad BahramiNo ratings yet
- 387 394 Ein 23 2Document8 pages387 394 Ein 23 2tomo tomoNo ratings yet
- ÇıktıDocument20 pagesÇıktıCanan TAYGURTNo ratings yet
- Strategy For End of Life Assessment For High Voltage Circuit BreakersDocument10 pagesStrategy For End of Life Assessment For High Voltage Circuit Breakersmihalcea45No ratings yet
- CIGRE-Ciclo de Vida de InterruptoresDocument8 pagesCIGRE-Ciclo de Vida de InterruptoresRoland AvlsNo ratings yet
- Hilber Et Al. - 2013 - Benefits of Reliability Centred Asset ManagementDocument4 pagesHilber Et Al. - 2013 - Benefits of Reliability Centred Asset ManagementAndrés ZúñigaNo ratings yet
- Condition Based MaintenanceDocument18 pagesCondition Based Maintenancedshalev8694No ratings yet
- Confiabilidad Sistemas de DistribuciónDocument9 pagesConfiabilidad Sistemas de DistribuciónJorgeNo ratings yet
- State Space Models For Condition Monitoring: A Case Study: Diego J. Pedregal, M Carmen CarneroDocument10 pagesState Space Models For Condition Monitoring: A Case Study: Diego J. Pedregal, M Carmen CarneroMohamedBoualilNo ratings yet
- Preventive MaintenanceDocument12 pagesPreventive MaintenanceNguyen Xuan TungNo ratings yet
- Determining The Reliabiity Function of The Thermal Power System in PP Nikola Tesla BDocument10 pagesDetermining The Reliabiity Function of The Thermal Power System in PP Nikola Tesla BSnezana KirinNo ratings yet
- Issues of Reliability and Security in Distributed Autonomous Power SystemsDocument17 pagesIssues of Reliability and Security in Distributed Autonomous Power SystemsHarjit Singh MangatNo ratings yet
- Reliability Centered MaintenanceDocument15 pagesReliability Centered MaintenanceEdmund YoongNo ratings yet
- Articulo de EstudioDocument10 pagesArticulo de EstudioMiyer DíazNo ratings yet
- Reliability Studies Accelerator - Burgazzi-PieriniDocument15 pagesReliability Studies Accelerator - Burgazzi-PieriniKazim RazaNo ratings yet
- RCM Alan PrideDocument16 pagesRCM Alan PrideambuenaflorNo ratings yet
- Impact of CCGT Start-Up Flexibility and Cycling Costs Towards Renewables IntegrationDocument8 pagesImpact of CCGT Start-Up Flexibility and Cycling Costs Towards Renewables Integrationbimbel fawwazNo ratings yet
- Fault Current MitigationDocument74 pagesFault Current Mitigationbaccouchi nasreddineNo ratings yet
- Optimising Safety Relief and Flare SystemsDocument8 pagesOptimising Safety Relief and Flare SystemsJoseph McMullenNo ratings yet
- Artiiculo 13Document16 pagesArtiiculo 13Efrain Parra QuispeNo ratings yet
- Reliability, Availability, and Maintainability: Probability Models For PopulationsDocument8 pagesReliability, Availability, and Maintainability: Probability Models For PopulationsMani KumarNo ratings yet
- 1-S2.0-S0951832023000820-Main-Progrma Mantto CondicDocument11 pages1-S2.0-S0951832023000820-Main-Progrma Mantto CondicJulio Cesar Diaz CaroNo ratings yet
- Optimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringDocument9 pagesOptimizing Maintenance Policies For A Yaw System Using Reliability-Centered Maintenance and Data-Driven Condition MonitoringclarkyeahNo ratings yet
- DC Power Maintenance Strategies For Reliability Battery Power Online 2020 - 348661 - 0Document4 pagesDC Power Maintenance Strategies For Reliability Battery Power Online 2020 - 348661 - 0elsonmilan761No ratings yet
- 02 HyeonminKim PDFDocument16 pages02 HyeonminKim PDFZeeshan TalibNo ratings yet
- RCM in Nuclear Power PlantsDocument13 pagesRCM in Nuclear Power PlantsAmar SaadiNo ratings yet
- State-of-the-Art Predictive Maintenance TechniquesDocument13 pagesState-of-the-Art Predictive Maintenance TechniquesKleber VieiraNo ratings yet
- Confiabilidad 1Document13 pagesConfiabilidad 1Caviedes SierraNo ratings yet
- Determination of The Most Opportune Time For Industrial Circuit Breaker ReplacementDocument12 pagesDetermination of The Most Opportune Time For Industrial Circuit Breaker ReplacementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CIRED2007 0243 PaperDocument4 pagesCIRED2007 0243 Paperlmsp69No ratings yet
- Condition Based Maintenance: Mike Dileo, Charles Manker, and John Cadick, P.E. © 1999 byDocument18 pagesCondition Based Maintenance: Mike Dileo, Charles Manker, and John Cadick, P.E. © 1999 byAna Fiorella PuntoNo ratings yet
- State-Of-The-Art Review On Asset Management Methodologies For Oil-Immersed Power TransformersDocument18 pagesState-Of-The-Art Review On Asset Management Methodologies For Oil-Immersed Power TransformersAdrian SieNo ratings yet
- Maintenance Management of Electrical Equipment Condition Monitoring Based Part 3Document4 pagesMaintenance Management of Electrical Equipment Condition Monitoring Based Part 3at35No ratings yet
- Sensors: Condition Assessment of Industrial Gas Turbine Compressor Using A Drift Soft Sensor Based in AutoencoderDocument14 pagesSensors: Condition Assessment of Industrial Gas Turbine Compressor Using A Drift Soft Sensor Based in AutoencoderMohamed Bin IerousNo ratings yet
- Deepanshi Jaiswal PDFDocument15 pagesDeepanshi Jaiswal PDFDeepanshi JaiswalNo ratings yet
- Operation and Preventive Maintenance of Pressure VesselsDocument13 pagesOperation and Preventive Maintenance of Pressure VesselsbrianNo ratings yet
- RCM in MV SubstationDocument6 pagesRCM in MV SubstationFred KellnerNo ratings yet
- Energies 15 03379Document32 pagesEnergies 15 03379KishoreNo ratings yet
- Ene bv4-05805-v2Document23 pagesEne bv4-05805-v2daveNo ratings yet
- Availability Analysis of Gas TurbinesDocument10 pagesAvailability Analysis of Gas TurbinesEman ZabiNo ratings yet
- Reliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationDocument5 pagesReliability-Centered Predictive Maintenance Scheduling For A Continuously Monitored System Subject To DegradationjudarangocaNo ratings yet
- Power and Reliability Management of Socs: Tajana Simunic Rosing, Kresimir Mihic, Giovanni de Micheli, Fellow IeeeDocument13 pagesPower and Reliability Management of Socs: Tajana Simunic Rosing, Kresimir Mihic, Giovanni de Micheli, Fellow IeeeAnilkumar PatilNo ratings yet
- ConclusionDocument6 pagesConclusionMaria CafeNo ratings yet
- Predictive Maintenance of Maritime Systems: Models and ChallengesDocument10 pagesPredictive Maintenance of Maritime Systems: Models and ChallengesSullivan F'gNo ratings yet
- Paper AM ConferenceDocument7 pagesPaper AM ConferenceKang MaNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Process System Value and Exergoeconomic Performance of Captive Power PlantsFrom EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Detailed Lesson Plan (DLP) Format: Instructional PlanningDocument5 pagesDetailed Lesson Plan (DLP) Format: Instructional PlanningRed Zye UbayNo ratings yet
- Oregano As A Mosquito CoilDocument6 pagesOregano As A Mosquito CoilErin Mullen88% (8)
- D9866 PowerVu Compact Receiver Guide R1 3Document118 pagesD9866 PowerVu Compact Receiver Guide R1 3Federico SosaNo ratings yet
- Mulk Raj Anands Untouchable An Explorationinto Inner SpaceDocument4 pagesMulk Raj Anands Untouchable An Explorationinto Inner SpaceKazi Ayman RAHMANNo ratings yet
- Nets Plans and ElevationsDocument8 pagesNets Plans and ElevationsTravel UnlimitedNo ratings yet
- Implementation of The Contensou-Erismann Model ofDocument12 pagesImplementation of The Contensou-Erismann Model ofJarek PlaszczycaNo ratings yet
- Second Order Differential EquationsDocument8 pagesSecond Order Differential EquationsNico StrachanNo ratings yet
- Mills Harm PrincipleDocument28 pagesMills Harm PrincipleSahil JaybhayNo ratings yet
- Free Download Here: Bhrigu Nandi Nadi PDFDocument2 pagesFree Download Here: Bhrigu Nandi Nadi PDFDd0% (1)
- 140185960-Kerin-Webb-The-Language-Pattern-Bible-Indirect-Hypnotherapy-Patterns - Of-Influence PDFDocument14 pages140185960-Kerin-Webb-The-Language-Pattern-Bible-Indirect-Hypnotherapy-Patterns - Of-Influence PDFbobNo ratings yet
- Space TrussDocument52 pagesSpace TrussUmair RazaNo ratings yet
- 3.2 Tides and PrecessionDocument5 pages3.2 Tides and PrecessionelezabethNo ratings yet
- Indian Dental Students' Vaccination Status, Knowledge, Attitudes, Practices Regarding Hepatitis BDocument5 pagesIndian Dental Students' Vaccination Status, Knowledge, Attitudes, Practices Regarding Hepatitis BDesy JesryantiNo ratings yet
- Accepted Manuscript: Applied Thermal EngineeringDocument24 pagesAccepted Manuscript: Applied Thermal EngineeringSiraj AL sharifNo ratings yet
- Nationalism in The PhilippinesDocument5 pagesNationalism in The PhilippinesShibumi SackiNo ratings yet
- Penngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Document15 pagesPenngaruh Intensitas Research and Development Dan Keuangan Sebagai Variabel Intervening Pada Perusahaan Lq45 Yang Terdaftar Di Bei Periode 2016-2020Nur WijayantiNo ratings yet
- Grounding SystemDocument186 pagesGrounding Systemjerry TomasNo ratings yet
- WRM Y8 Student BookDocument637 pagesWRM Y8 Student BookMurali75% (4)
- Week 9Document33 pagesWeek 9notabc gamerNo ratings yet
- Problem Set #4 - Mathematics in Population BiologyDocument14 pagesProblem Set #4 - Mathematics in Population BiologyMario RoseteNo ratings yet
- Bem 102 ModuleDocument20 pagesBem 102 ModuleClarisse MacalintalNo ratings yet
- Components of Project Quality PlanDocument17 pagesComponents of Project Quality PlanEko PrayogiNo ratings yet
- HT QuestionsDocument3 pagesHT QuestionsSanthoshirathnam GunjaNo ratings yet
- WMO Greenhouse Gas BulletinDocument10 pagesWMO Greenhouse Gas BulletinWHYY NewsNo ratings yet
- Class VI To X HOLIDAY HOMEWORK 2022-23Document16 pagesClass VI To X HOLIDAY HOMEWORK 2022-23Chiransh GamingNo ratings yet
- Prelim Test RESEARCH 1Document3 pagesPrelim Test RESEARCH 1Christine JadeNo ratings yet
- Quiz - Lab Safety and ApparatusDocument1 pageQuiz - Lab Safety and ApparatusJohn Kristoffer RoblezaNo ratings yet
- Heat and Thermodynamics According To KPK Textbook & Sindh TextbookDocument15 pagesHeat and Thermodynamics According To KPK Textbook & Sindh Textbookswatmiandam44No ratings yet
- Thermodynamics 1 CP04 Assessment - Copy2 PDFDocument2 pagesThermodynamics 1 CP04 Assessment - Copy2 PDFJohn Paul PerezNo ratings yet