Download as pdf or txt
You might also like
- COBOL Programming For IMSDocument55 pagesCOBOL Programming For IMSsatishms10100% (1)
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- 7 Linearization Jonkman 2013Document11 pages7 Linearization Jonkman 2013rrNo ratings yet
- Process Modelling, Simulation and Control For Chemical Engineering. Worked Problems. Chapter 2: FundamentalsDocument7 pagesProcess Modelling, Simulation and Control For Chemical Engineering. Worked Problems. Chapter 2: FundamentalsItzela VazquezNo ratings yet
- Inverted PendulumDocument18 pagesInverted PendulumpaulwigtNo ratings yet
- DSS8840Document53 pagesDSS8840sts100No ratings yet
- CS 1Document36 pagesCS 1Haftamu HilufNo ratings yet
- Analogies: Analogies Give Engineers Insight!Document13 pagesAnalogies: Analogies Give Engineers Insight!Soma GopalakrishnaNo ratings yet
- Mechatronics Lab ME 140L Introduction To Control Systems: I. Lecture 2: Transfer Functions, EigenvaluesDocument13 pagesMechatronics Lab ME 140L Introduction To Control Systems: I. Lecture 2: Transfer Functions, EigenvaluesGrant GeorgiaNo ratings yet
- SIMPLE Algorithm BriefDocument16 pagesSIMPLE Algorithm BriefAbhishek BansalNo ratings yet
- Assignment 3Document15 pagesAssignment 3Jofy GeorgeNo ratings yet
- Sample & Practice Tutorial Assignment On UNIT IIDocument9 pagesSample & Practice Tutorial Assignment On UNIT IIFF02 Aniket BarhateNo ratings yet
- Vout Vin: EC2006: Control SystemsDocument6 pagesVout Vin: EC2006: Control SystemsMANOJ KUMAR DASNo ratings yet
- 1 A Basics ElectricCircuitsDocument16 pages1 A Basics ElectricCircuitsjhornsguideNo ratings yet
- Chapter7 3Document12 pagesChapter7 3khan lisedNo ratings yet
- Basics of Feedback Control: Mechanical and Aerospace Engineering Cornell UniversityDocument36 pagesBasics of Feedback Control: Mechanical and Aerospace Engineering Cornell UniversityahmadNo ratings yet
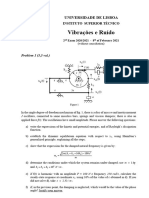
- Exam Vibrations and NoiseDocument5 pagesExam Vibrations and NoisejoaoftabreuNo ratings yet
- 1035purl IPC TYS 2023Document11 pages1035purl IPC TYS 2023shiv lionNo ratings yet
- Lec 2 PID ControlDocument8 pagesLec 2 PID ControlAep Kusman HeriyantoNo ratings yet
- Practice Final ExamDocument7 pagesPractice Final ExamAdrianNo ratings yet
- Part 17Document6 pagesPart 17Kerlos SaeedNo ratings yet
- POM Final FormulaDocument5 pagesPOM Final FormulaShawron weevNo ratings yet
- Introduction 2Document14 pagesIntroduction 2mwasa28No ratings yet
- Control SystemDocument31 pagesControl SystemMidhun VargheseNo ratings yet
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Document11 pagesElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNo ratings yet
- 3-Chapter 10Document69 pages3-Chapter 10Juju JantonNo ratings yet
- Signals and Waves Part CDocument69 pagesSignals and Waves Part CCyber CityNo ratings yet
- Classical NotesDocument145 pagesClassical NotesHarsh SanklechaNo ratings yet
- Home Work of Process ControlDocument5 pagesHome Work of Process ControlIqra SafdarNo ratings yet
- Lecture 1Document30 pagesLecture 1ORK BUNSOKRAKMUNYNo ratings yet
- Mathematical Models of Physical SystemsDocument12 pagesMathematical Models of Physical SystemsAnanthan SrijithNo ratings yet
- 5 Fault AnalysisDocument45 pages5 Fault AnalysisSari M.INo ratings yet
- Circuit Theory I-LEC Mohamed MegahedDocument137 pagesCircuit Theory I-LEC Mohamed MegahedHussien HassanNo ratings yet
- Chapter 2 - Capacitors and InductorsDocument16 pagesChapter 2 - Capacitors and InductorsFebrian DzikriNo ratings yet
- Chapter 9:: Frequency Domain Analysis of Dynamic SystemsDocument11 pagesChapter 9:: Frequency Domain Analysis of Dynamic SystemsinnoodiraNo ratings yet
- Introduction To Control Systems Analysis 1. The Transfer Function 1.1Document7 pagesIntroduction To Control Systems Analysis 1. The Transfer Function 1.1prica_adrianNo ratings yet
- Module 3 - Basic Electrical - KtuQbankDocument42 pagesModule 3 - Basic Electrical - KtuQbankThahir TNo ratings yet
- AP Physics 1 - Formula SheetDocument2 pagesAP Physics 1 - Formula SheetRunze LiNo ratings yet
- PID ExamplesDocument15 pagesPID ExamplesBaba YagaNo ratings yet
- Formulario - Fisica I: Conversiones: Métodos AnalíticosDocument1 pageFormulario - Fisica I: Conversiones: Métodos AnalíticosJoseluuis HErreraNo ratings yet
- Wind Energy Conversion Systems KD7011 Project ReportDocument13 pagesWind Energy Conversion Systems KD7011 Project ReportMah EshNo ratings yet
- EN40: Dynamics and Vibrations Midterm Examination Thursday March 8 2018Document7 pagesEN40: Dynamics and Vibrations Midterm Examination Thursday March 8 2018Mustefa AdemNo ratings yet
- Formula FinalDocument1 pageFormula FinalRookiesuga the geniusNo ratings yet
- Nonlinear Lect6Document16 pagesNonlinear Lect6win alfalahNo ratings yet
- AP Physics1 Student Workbook AppendixDocument11 pagesAP Physics1 Student Workbook AppendixcarlosNo ratings yet
- Smart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050Document65 pagesSmart Materials: D.S.S.Sudhakar FR - Conceicao Rodrigues College of Engineering BANDRA (W), MUMBAI-40050DIPAK VINAYAK SHIRBHATENo ratings yet
- Chapter 2Document62 pagesChapter 2Shahadat HossainNo ratings yet
- Dynamic - Characterstics of Instruments Aug 2023Document96 pagesDynamic - Characterstics of Instruments Aug 2023Sc RayaNo ratings yet
- Physics 71 EquationsDocument3 pagesPhysics 71 EquationsElah PalaganasNo ratings yet
- ADocument41 pagesAAayushKumarNo ratings yet
- Converter System Modeling Via MATLAB/SimulinkDocument18 pagesConverter System Modeling Via MATLAB/SimulinkjacarmiNo ratings yet
- TP Sys2Document24 pagesTP Sys2Draw SmailNo ratings yet
- Dynamic Programming Handout - : 14.451 Recitation, February 18, 2005 - Todd GormleyDocument11 pagesDynamic Programming Handout - : 14.451 Recitation, February 18, 2005 - Todd GormleyenkelonNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- Simulation Power ElectronicDocument5 pagesSimulation Power Electronicchroeun sokayNo ratings yet
- Formula SheetDocument3 pagesFormula SheetCarlos GamioNo ratings yet
- Circuit Theory II - LecDocument105 pagesCircuit Theory II - LecAsaad MusaabNo ratings yet
- Modelling and Simulation of DC Drive Using PI and PID ControllerDocument4 pagesModelling and Simulation of DC Drive Using PI and PID ControllerOTOMASYON PLCNo ratings yet
- Alternating Current PDFDocument26 pagesAlternating Current PDFMeena SharmaNo ratings yet
- 3rd LE-Nonlinear Programming - 30april2019Document12 pages3rd LE-Nonlinear Programming - 30april2019Mayumi VillavicencioNo ratings yet
- Tutorial AnswersDocument8 pagesTutorial AnswersYusupha TaalNo ratings yet
- Mathematical Formulas for Economics and Business: A Simple IntroductionFrom EverandMathematical Formulas for Economics and Business: A Simple IntroductionRating: 4 out of 5 stars4/5 (4)
- Lec - 6-Microprocessser and MicrocontrolerDocument17 pagesLec - 6-Microprocessser and MicrocontrolerNurhussen NureNo ratings yet
- Assignment 1Document1 pageAssignment 1Nurhussen Nure100% (1)
- Learning Outcome of Mechanical Exit Exam CoursesDocument4 pagesLearning Outcome of Mechanical Exit Exam CoursesNurhussen Nure0% (1)
- Lec 2 Actuation Systems 1Document57 pagesLec 2 Actuation Systems 1Nurhussen NureNo ratings yet
- Lec 3 Semiconductor 1Document26 pagesLec 3 Semiconductor 1Nurhussen NureNo ratings yet
- RAC Chapter 2Document12 pagesRAC Chapter 2Nurhussen NureNo ratings yet
- Refrigeration Air CondDocument5 pagesRefrigeration Air CondNurhussen NureNo ratings yet
- Database PracticesDocument38 pagesDatabase Practicessuresh vishwakarmaNo ratings yet
- EN Data Sheet VEGAPULS 6X OverviewDocument2 pagesEN Data Sheet VEGAPULS 6X OverviewJan KowalczykNo ratings yet
- MW Mobile Workstation R .: Connected. Powerful. RuggedDocument4 pagesMW Mobile Workstation R .: Connected. Powerful. RuggedraghavchNo ratings yet
- AY 18-19 E1, E2-Sem2 Remedial Results - July, 2019: S.NO. ID Subject Semester GradeDocument68 pagesAY 18-19 E1, E2-Sem2 Remedial Results - July, 2019: S.NO. ID Subject Semester GradesrikanthNo ratings yet
- Assignment NO 5 (A) ACNDocument1 pageAssignment NO 5 (A) ACNdivya lokhandeNo ratings yet
- Technical Data and Instructions: Dataplot Printer Control Board Model Cb1100Document4 pagesTechnical Data and Instructions: Dataplot Printer Control Board Model Cb1100Muhammad Bilal KhattakNo ratings yet
- Student Data Base Full PDFDocument31 pagesStudent Data Base Full PDFShiva BandaruNo ratings yet
- Install OMV On Iomega HMNHD Cloud Edition With Disk Image - v05Document4 pagesInstall OMV On Iomega HMNHD Cloud Edition With Disk Image - v05KApps KAppsNo ratings yet
- Software Options FANUC PDFDocument12 pagesSoftware Options FANUC PDFavinash14 neereNo ratings yet
- MMIXware - A RISC Computer For The Third Millennium - KnuthDocument556 pagesMMIXware - A RISC Computer For The Third Millennium - Knuthiammegatron100% (1)
- PEGA Interview Set03Document8 pagesPEGA Interview Set03satyach123No ratings yet
- Oda Bultum UniverstyDocument64 pagesOda Bultum Universtyidrisabdurazek0123No ratings yet
- UeventdDocument3 pagesUeventdhaget36081No ratings yet
- Attendance System Based On Fingerprint Using ARDUINO, 6 (6), 689Document4 pagesAttendance System Based On Fingerprint Using ARDUINO, 6 (6), 689chris gellaNo ratings yet
- Datasheet Nvidia Bluefield 2 DpuDocument2 pagesDatasheet Nvidia Bluefield 2 DpuDEF ALMATERINo ratings yet
- 6.a. Design and Implementation of Binary To Gray Code Converters Using Logic GatesDocument11 pages6.a. Design and Implementation of Binary To Gray Code Converters Using Logic GatesTejesh MannemNo ratings yet
- Cold Backup & Recovery Scenarios PDFDocument33 pagesCold Backup & Recovery Scenarios PDFG.R.THIYAGU ; Oracle DBA100% (5)
- Event Handling:: The Delegation Event ModelDocument27 pagesEvent Handling:: The Delegation Event Modelkrishnanradha_1976No ratings yet
- A+ Operating SystemDocument58 pagesA+ Operating SystemAmanuel AbrhaNo ratings yet
- PHP McqsDocument73 pagesPHP McqsAsadNo ratings yet
- Business Driven Information Systems 5th Edition Baltzan Solutions ManualDocument20 pagesBusiness Driven Information Systems 5th Edition Baltzan Solutions ManualkaylintocwcNo ratings yet
- Norman Book On Cumputer Virus PDFDocument56 pagesNorman Book On Cumputer Virus PDFEsteban EscobarNo ratings yet
- FRDM-KL46Z SCHDocument5 pagesFRDM-KL46Z SCHTuệ LýNo ratings yet
- Website: Vce To PDF Converter: Facebook: Twitter:: 220-1002.vceplus - Premium.Exam.82QDocument33 pagesWebsite: Vce To PDF Converter: Facebook: Twitter:: 220-1002.vceplus - Premium.Exam.82QArun kumarNo ratings yet
- Section 1Document42 pagesSection 1sofyankp mtmNo ratings yet
- Unit-3 & 4 Embedded Systems (A1430) Rtos PDFDocument179 pagesUnit-3 & 4 Embedded Systems (A1430) Rtos PDFManojPaidimarriNo ratings yet
- Harmony Installation Guide 3.1Document130 pagesHarmony Installation Guide 3.1parvvee100% (1)
- Haar Training PythonDocument9 pagesHaar Training PythonLarry AbisaíNo ratings yet