Download as pdf or txt
You might also like
- Helmholtz Galvanometer: Lab ManualDocument11 pagesHelmholtz Galvanometer: Lab Manualkartik guptaNo ratings yet
- REVIEW 1 - Bending Open and Closed SectioDocument28 pagesREVIEW 1 - Bending Open and Closed SectioRobin JamesNo ratings yet
- (2005) Vibration Analysis of A Stepped Laminated Composite Timoshenko BeamDocument10 pages(2005) Vibration Analysis of A Stepped Laminated Composite Timoshenko BeamMohammad AshrafyNo ratings yet
- Physics: Total Syllabus CHEMISTRY: Total Syllabus MATHEMATICS: Total SyllabusDocument16 pagesPhysics: Total Syllabus CHEMISTRY: Total Syllabus MATHEMATICS: Total SyllabusSakshi DadlaniNo ratings yet
- 1988-002.a FiniteDocument26 pages1988-002.a FiniteWonna Modeste SiluéNo ratings yet
- Cyclotrons: Pauli HeikkinenDocument14 pagesCyclotrons: Pauli HeikkinenAmr HendyNo ratings yet
- Crystallograpic PlanesDocument13 pagesCrystallograpic PlanesMd Mehrab Alam ShayikhNo ratings yet
- Extra Problems For MIDDocument4 pagesExtra Problems For MIDSaquibNo ratings yet
- Trigonometric Functions: All Rights ReservedDocument8 pagesTrigonometric Functions: All Rights ReservedKimbo NugyenNo ratings yet
- F2 Mid Sem Jan 2022 PDFDocument3 pagesF2 Mid Sem Jan 2022 PDFHarsh PandeyNo ratings yet
- Problem Set 6Document4 pagesProblem Set 6James ConnaughtonNo ratings yet
- Circular Measure 1Document5 pagesCircular Measure 1AHNAF AJMAINNo ratings yet
- B. Tech - 80 (Final)Document4 pagesB. Tech - 80 (Final)Anonymous BOlFAakI1No ratings yet
- Homework Set #2Document11 pagesHomework Set #2S Shek DhavudNo ratings yet
- 10.1007@978 3 642 82838 615 PDFDocument15 pages10.1007@978 3 642 82838 615 PDFLeonardo Calheiros RodriguesNo ratings yet
- University Institute of Engineering Academic Unit 3Document38 pagesUniversity Institute of Engineering Academic Unit 3Vinoth Rouge RockersNo ratings yet
- Practicals Combined Structural Geology 2014Document11 pagesPracticals Combined Structural Geology 2014PaulaNo ratings yet
- Problems Set 2Document2 pagesProblems Set 2Govindanunni PadmakumarNo ratings yet
- 06 - Angular Momentum - ExerciseDocument19 pages06 - Angular Momentum - Exercisekenchan0810.kcNo ratings yet
- Lecture 13, 14 - Chapter 6 Area Moments of InertiaDocument31 pagesLecture 13, 14 - Chapter 6 Area Moments of Inertiarobel metikuNo ratings yet
- 08 General Problems U Tube, Floating Body, Potential Energy, EtcDocument27 pages08 General Problems U Tube, Floating Body, Potential Energy, Etcthathalakshman121407No ratings yet
- Physics Eng 2006Document3 pagesPhysics Eng 2006Matei Ionita100% (2)
- Maths FormDocument9 pagesMaths FormBenNo ratings yet
- Massachusetts Institute of TechnologyDocument4 pagesMassachusetts Institute of TechnologyJack SoNo ratings yet
- Elastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignDocument45 pagesElastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignjcpolicarpiNo ratings yet
- 1 - Properties of Plane AreasDocument24 pages1 - Properties of Plane AreasEng Ahmed Abdullah (Engineer)No ratings yet
- Simple Pendulum (MDocument11 pagesSimple Pendulum (Mthathalakshman121407No ratings yet
- Physics NotesDocument69 pagesPhysics NotesBilal AhmedNo ratings yet
- ZGX WeirdgeoDocument15 pagesZGX WeirdgeoNavjot SinghNo ratings yet
- The Cycloid:, 2 θ - 2 θ = + (sin) , 2 2 θ θ = − (cos) - 1 2 θDocument17 pagesThe Cycloid:, 2 θ - 2 θ = + (sin) , 2 2 θ θ = − (cos) - 1 2 θAkashParameswaranNo ratings yet
- 13 Tambahan ASST - ArchDocument10 pages13 Tambahan ASST - ArchAryatirta PredanaNo ratings yet
- JR Maths - I B Important QuestionsDocument19 pagesJR Maths - I B Important QuestionsKoushik nAllamNo ratings yet
- Moment of Inertia 2Document21 pagesMoment of Inertia 2Jessie RuizNo ratings yet
- Physics430 Lecture23Document17 pagesPhysics430 Lecture23González Trejo Mónica LizbethNo ratings yet
- Moments of Inertia: I - The Moment of Inertia A - The Cross-Sectional AreaDocument5 pagesMoments of Inertia: I - The Moment of Inertia A - The Cross-Sectional AreaRobinhood Jevons MartirezNo ratings yet
- Vibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Document20 pagesVibration Analysis of A Rotating Timoshenko Beam Lin 200 000167190400006Mariela TisseraNo ratings yet
- X X F DX X F: Applications of Integration Plane Areas by IntegrationDocument17 pagesX X F DX X F: Applications of Integration Plane Areas by IntegrationLee Anthony ChingNo ratings yet
- Lesson 1.4 Circular FunctionsDocument23 pagesLesson 1.4 Circular FunctionsChelsea RoqueNo ratings yet
- Math PDFDocument114 pagesMath PDFAzim KhanNo ratings yet
- WebChallengeProblems 3C3 PDFDocument17 pagesWebChallengeProblems 3C3 PDFRevanKumarBattuNo ratings yet
- B. A./B. Sc. (Hons) Semester V Open Book Examination 2 0 2 1 - 2 2Document3 pagesB. A./B. Sc. (Hons) Semester V Open Book Examination 2 0 2 1 - 2 2Kumar PharsaNo ratings yet
- Properti Penampang 2022Document50 pagesProperti Penampang 2022Feriawan HambalangNo ratings yet
- 11.2 Volume of Revolution 7Document7 pages11.2 Volume of Revolution 7Hin Wa LeungNo ratings yet
- Problem Set VI Lagrangian DynamicsDocument4 pagesProblem Set VI Lagrangian DynamicsDiego ForeroNo ratings yet
- MTE 583 - Class - 17 PDFDocument13 pagesMTE 583 - Class - 17 PDFPorfirio HernandezNo ratings yet
- Mathematical SymmetryDocument29 pagesMathematical SymmetrymariaNo ratings yet
- B Scmathematics Solid GeometryDocument3 pagesB Scmathematics Solid GeometrySaiduluNo ratings yet
- Lateral Loads On Pile TheoryDocument10 pagesLateral Loads On Pile TheoryR ShyamNo ratings yet
- Equivalent LoadsDocument29 pagesEquivalent LoadsJakob FiskerNo ratings yet
- 6 Problemsgroup 2Document8 pages6 Problemsgroup 2Alhji AhmedNo ratings yet
- 2013 Nandi North District Joint Mock Evaluation Test PP1Document5 pages2013 Nandi North District Joint Mock Evaluation Test PP1FREDRICK100% (1)
- IAS Mains Physics 2004Document9 pagesIAS Mains Physics 2004RATNADEEP BANERJEENo ratings yet
- To Appear in Comment. Math. HelvDocument14 pagesTo Appear in Comment. Math. Helvvahid mesicNo ratings yet
- 6.2 Volumes: Applications of IntegrationDocument70 pages6.2 Volumes: Applications of Integrationenaam1977No ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Mathematical Analysis 1: theory and solved exercisesFrom EverandMathematical Analysis 1: theory and solved exercisesRating: 5 out of 5 stars5/5 (1)
- Prac Spring StaticDocument3 pagesPrac Spring StaticIsma HatakeNo ratings yet
- Assessment2 DniDocument2 pagesAssessment2 DniIsma HatakeNo ratings yet
- PS1 Probs Error-ProbsDocument4 pagesPS1 Probs Error-ProbsIsma HatakeNo ratings yet
- Control3 Prob2 enDocument1 pageControl3 Prob2 enIsma HatakeNo ratings yet
- Control2 en SolDocument2 pagesControl2 en SolIsma HatakeNo ratings yet
- Problemas enDocument2 pagesProblemas enIsma HatakeNo ratings yet
- S. No. Blooms Taxonomy Level Course Outcomes: Unit-IiDocument6 pagesS. No. Blooms Taxonomy Level Course Outcomes: Unit-IiShubhamNo ratings yet
- SP 52.13330.2016 (Updated SNiP 23-05-95) - Natural and Artificial LightingDocument67 pagesSP 52.13330.2016 (Updated SNiP 23-05-95) - Natural and Artificial LightingValentínNo ratings yet
- Problem Set No. 3Document2 pagesProblem Set No. 3marcusluismacusiNo ratings yet
- Vol IV OppenheimerDocument199 pagesVol IV Oppenheimerpeter stoschNo ratings yet
- Dukler 1980Document10 pagesDukler 1980Vassilios KelessidisNo ratings yet
- Li 2021Document9 pagesLi 2021Smruti Ranjan PattanayakNo ratings yet
- Advanced Composites For Utility Aplications Phase IIIDocument184 pagesAdvanced Composites For Utility Aplications Phase IIImhinojosatNo ratings yet
- General Physics 2 Current and ResistanceDocument24 pagesGeneral Physics 2 Current and ResistanceCassandra Mae Bauit PascuaNo ratings yet
- SLM General Physics 1 3rdWk PDFDocument24 pagesSLM General Physics 1 3rdWk PDFKrestel Faith CabalfinNo ratings yet
- Hierarchical Infographics by SlidesgoDocument33 pagesHierarchical Infographics by SlidesgoMarvl ArchNo ratings yet
- Jaw Crusher For Primary Crushing - Fote Heavy MachineryDocument18 pagesJaw Crusher For Primary Crushing - Fote Heavy MachineryIvy100% (1)
- Vacuum Pumps - Calculating Flow Rate and Required Evacuation TimeDocument3 pagesVacuum Pumps - Calculating Flow Rate and Required Evacuation TimecordobaluisfNo ratings yet
- New Scientist July 15-21 2017Document61 pagesNew Scientist July 15-21 2017Felipe GustavoNo ratings yet
- 0901d19680056c35 Pump Bearing Brochure PDFDocument4 pages0901d19680056c35 Pump Bearing Brochure PDFMohd NazriNo ratings yet
- 4 Flownets 170724070429Document16 pages4 Flownets 170724070429Joe NjoreNo ratings yet
- Practice SheetDocument4 pagesPractice SheetsatishNo ratings yet
- Electronic Structure of MatterDocument47 pagesElectronic Structure of MatterMary Rose Lepardo - RosanesNo ratings yet
- Aga A1 1002 ApDocument1 pageAga A1 1002 Apdeepaksharma1976No ratings yet
- FST-4C (ICSE - G-2) Phy+Chem (C-09) 04-08-2023 - SOLDocument5 pagesFST-4C (ICSE - G-2) Phy+Chem (C-09) 04-08-2023 - SOLManas YadavNo ratings yet
- Physics Chapter 3Document5 pagesPhysics Chapter 3melodiusixNo ratings yet
- ALFA-17 - SoilDocument50 pagesALFA-17 - SoilSubhan MuhammadNo ratings yet
- Lesson 4 - Water CycleDocument4 pagesLesson 4 - Water Cycleapi-552754990No ratings yet
- 1 ResSimCh5Document31 pages1 ResSimCh5weldsv1No ratings yet
- Polarization Interferometer For Measuring Small DisplacementDocument4 pagesPolarization Interferometer For Measuring Small Displacementchung phamNo ratings yet
- Maths Assessment For Yr9/10 (S2/3) - Entry: Place Test TakenDocument10 pagesMaths Assessment For Yr9/10 (S2/3) - Entry: Place Test TakenCanioNo ratings yet
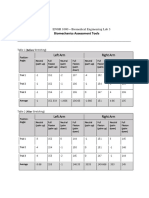
- Lab 3 Biomechanics0Document4 pagesLab 3 Biomechanics0Evan BurnsNo ratings yet
- 1-180925-Practice Drawing Involute Gear Using MathematicaDocument13 pages1-180925-Practice Drawing Involute Gear Using MathematicaPradita FirmansyahNo ratings yet
- Precalculus11 Q2 M2 Trigonometric IdentitiesDocument35 pagesPrecalculus11 Q2 M2 Trigonometric IdentitiesRayezeus Jaiden Del Rosario100% (1)
- Maths Infinity: (Agni 3.0 Batch)Document13 pagesMaths Infinity: (Agni 3.0 Batch)varad1unacademyNo ratings yet
- Data Analysis in ArcheryDocument30 pagesData Analysis in ArcheryJago WestawayNo ratings yet