
6 21 5 PB
6 21 5 PB
You might also like
- BIGO LIVE Broadcaster AgreementDocument5 pagesBIGO LIVE Broadcaster Agreements zamanNo ratings yet
- The Philosophy of Andy WarholDocument1 pageThe Philosophy of Andy WarholMos Catalina0% (2)
- Hkdse English Reading全方位實戰神技精讀 主筆記 Sample 1643026918Document23 pagesHkdse English Reading全方位實戰神技精讀 主筆記 Sample 1643026918SupercellNo ratings yet
- PID Controller Based DC Motor Speed ControlDocument4 pagesPID Controller Based DC Motor Speed ControlEditor IJRITCCNo ratings yet
- Motor DC PID System Regulator For Mini Conveyor Drive Based-On MatlabDocument6 pagesMotor DC PID System Regulator For Mini Conveyor Drive Based-On MatlabGifhar RahmanNo ratings yet
- 4426 15682 1 PBDocument9 pages4426 15682 1 PBmuhammad akbarNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: January 2015EngidNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: January 2015lovely personNo ratings yet
- Irjet V2i8242 PDFDocument6 pagesIrjet V2i8242 PDFAhmed Osama MikawiNo ratings yet
- Analysis of Speed Control of DC Motor - A Review StudyDocument6 pagesAnalysis of Speed Control of DC Motor - A Review StudyRachelNo ratings yet
- DC Motor Speed Control Using PID ControllerDocument7 pagesDC Motor Speed Control Using PID ControllerEditor IJTSRDNo ratings yet
- Speed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Document7 pagesSpeed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Yeduresapu SantoshNo ratings yet
- DC Motor Speed Controller Design Using Pulse WidthDocument12 pagesDC Motor Speed Controller Design Using Pulse WidthHerman BachtiarNo ratings yet
- Modelling and Control of DC Motor Speed and Position For Wheel Mobile Robot ApplicationDocument5 pagesModelling and Control of DC Motor Speed and Position For Wheel Mobile Robot Applicationmusavvirabdul123No ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: February 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: February 2015Muhdnursalam ZolkepliNo ratings yet
- DC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerDocument4 pagesDC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerKuganes ChandranNo ratings yet
- Real Time DC Motor Position Control Using Pid Controller in LabviewDocument8 pagesReal Time DC Motor Position Control Using Pid Controller in LabviewCrazyGamer SLNo ratings yet
- DC Motor Pid ControlDocument6 pagesDC Motor Pid ControlSampath KumarNo ratings yet
- Ben Faith PublicationDocument12 pagesBen Faith PublicationSAMPSON BENDORNo ratings yet
- DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsDocument11 pagesDC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsLele glosyNo ratings yet
- A Project ProposalDocument5 pagesA Project ProposalMuhammad Umer FarooqNo ratings yet
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 pagesSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriNo ratings yet
- Result PPRDocument5 pagesResult PPRMayuri Chauray-shindeNo ratings yet
- Tuning of An Optimal PID Controller With Iterative Feedback Tuning Method For DC MotorDocument5 pagesTuning of An Optimal PID Controller With Iterative Feedback Tuning Method For DC MotorLeonardo GarberoglioNo ratings yet
- CD-24-Main Doc Pid Using ArduinoDocument63 pagesCD-24-Main Doc Pid Using Arduinogxge50% (2)
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 pagesGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasNo ratings yet
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Document6 pagesLab View Based Speed Control of DC Motor Using PID Controller-1582user01254No ratings yet
- Intelligent Control Strategies For Tuning PID of Speed Control of DC Motor - A ReviewDocument8 pagesIntelligent Control Strategies For Tuning PID of Speed Control of DC Motor - A ReviewArsyad CahyaNo ratings yet
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 pagesDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Speed Control of DC Motor Using PIC 16F877A Microcontroller: July 2014Document13 pagesSpeed Control of DC Motor Using PIC 16F877A Microcontroller: July 2014DUY LÊ KHÁNHNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument6 pagesControl BLDC Motor Speed Using PID Controllertaddese bekeleNo ratings yet
- Camera Movement Control Using PID Controller in LabVIEWDocument5 pagesCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDNo ratings yet
- DE Sem 6 ReportDocument26 pagesDE Sem 6 ReportKotadia ShivamNo ratings yet
- DC Motor Closed LoopDocument11 pagesDC Motor Closed Looprichard chombaNo ratings yet
- Induction MotorDocument5 pagesInduction MotorNeha GuptaNo ratings yet
- Speed Control of DC Motor Using Optimization Techniques Based PID ControllerDocument8 pagesSpeed Control of DC Motor Using Optimization Techniques Based PID ControllerAsha PatilNo ratings yet
- Brushless DC Motor Speed Control Using Both PI ConDocument8 pagesBrushless DC Motor Speed Control Using Both PI ConDrishyaNo ratings yet
- Monitoring and Control of A Variable Frequency Drive Using PLC and ScadaDocument8 pagesMonitoring and Control of A Variable Frequency Drive Using PLC and ScadaPiero AlarconNo ratings yet
- Comparative Analysis of Speed Control Techniques of DC Motors With MatlabDocument4 pagesComparative Analysis of Speed Control Techniques of DC Motors With Matlabsrinureddy2014No ratings yet
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- Synopsis PPT 4Document7 pagesSynopsis PPT 4Appu SpecialNo ratings yet
- DC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerDocument6 pagesDC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerFirman IlyasNo ratings yet
- ProposalDocument3 pagesProposalIbrar younisNo ratings yet
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocument14 pagesImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveGery VerzaztNo ratings yet
- Speed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961Document6 pagesSpeed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961NithyashriNo ratings yet
- Ushless DC Motor Speed Control Using Both PIDocument7 pagesUshless DC Motor Speed Control Using Both PINxj CfcNo ratings yet
- Control Report 045Document4 pagesControl Report 045HybaibNo ratings yet
- Comparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527Document6 pagesComparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527DIVYA PRASOONA CNo ratings yet
- Lab Report Control IDocument19 pagesLab Report Control Iridzwan abuNo ratings yet
- PID Based Dynamometer Used in Engine TestDocument7 pagesPID Based Dynamometer Used in Engine TestAyeshá KhánNo ratings yet
- Speed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationDocument5 pagesSpeed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationWahyunggoro ONo ratings yet
- Fuzzy PID Supervised Online ANFIS Based Speed Controller For Brushless DC MotorDocument35 pagesFuzzy PID Supervised Online ANFIS Based Speed Controller For Brushless DC MotorMuthukumariNo ratings yet
- Design and Implementation of An Improved Automatic DC Motor Speed Control Systems Using MicrocontrollerDocument13 pagesDesign and Implementation of An Improved Automatic DC Motor Speed Control Systems Using MicrocontrollerKIU PUBLICATION AND EXTENSIONNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Design of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueDocument15 pagesDesign of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueroyclhorNo ratings yet
- Labview Based Speed Control of DC Motor Using Pid ControllerDocument7 pagesLabview Based Speed Control of DC Motor Using Pid ControllerCrazyGamer SLNo ratings yet
- Speed and Position Control of A DC Motor Using ATmega328Document5 pagesSpeed and Position Control of A DC Motor Using ATmega328GRD JournalsNo ratings yet
- Control of DC Motor Using Genetic Algorithm Based PID ControllerDocument7 pagesControl of DC Motor Using Genetic Algorithm Based PID ControllerKhiêm NguyễnNo ratings yet
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocument7 pagesSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- Seminar ReportDocument23 pagesSeminar ReportSwapnil Behera100% (1)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Gupta R. S., Principles of Structural Design Wood, Steel, and Concrete, 2nd Ed, 2014Document58 pagesGupta R. S., Principles of Structural Design Wood, Steel, and Concrete, 2nd Ed, 2014reyNo ratings yet
- 4357r 85 PDFDocument14 pages4357r 85 PDFFred PrzNo ratings yet
- Virtual Screening of FOXO3a Activators From Natural Product Like Compound LibraryDocument16 pagesVirtual Screening of FOXO3a Activators From Natural Product Like Compound Libraryelbizco8No ratings yet
- SPC SpreadsheetDocument10 pagesSPC SpreadsheetSpyros IliakisNo ratings yet
- Mixed Banking:: System Refers To That Banking System Under Which TheDocument7 pagesMixed Banking:: System Refers To That Banking System Under Which TheLOKESH RAMNo ratings yet
- DSA Weekly PlanDocument3 pagesDSA Weekly PlanJatin0% (1)
- 5) Freshmen Sem 2 - Skills Employability (Sas)Document5 pages5) Freshmen Sem 2 - Skills Employability (Sas)Crislyn Jilou Bugas AdlawanNo ratings yet
- NORTH NEGROS SUGAR CO V HIDALGO FULL TEXTDocument29 pagesNORTH NEGROS SUGAR CO V HIDALGO FULL TEXTKiethe MyraNo ratings yet
- Technical Proposal 1Document2 pagesTechnical Proposal 1syed khalilNo ratings yet
- Amalgamador LM1237Document42 pagesAmalgamador LM1237valam ltdaNo ratings yet
- GR 190080Document9 pagesGR 190080Arvi MendezNo ratings yet
- HKOH SNDL Int ReqDocument2 pagesHKOH SNDL Int ReqMuhammad AsfandyarNo ratings yet
- LCE Decline To Issue Preventive SuspensionDocument4 pagesLCE Decline To Issue Preventive SuspensionJem YuloNo ratings yet
- 042 Myrmidon (Elf Class)Document3 pages042 Myrmidon (Elf Class)VikshadeNo ratings yet
- Cornetto MixDocument2 pagesCornetto Mixnitin salujaNo ratings yet
- Collimator Instruction Manuals PDFDocument160 pagesCollimator Instruction Manuals PDFNauman100% (1)
- LAB 6 7-ElectroMechanical PneumaticDocument9 pagesLAB 6 7-ElectroMechanical PneumaticBien MedinaNo ratings yet
- Fibre Optics - PDFDocument56 pagesFibre Optics - PDFgroverpranjal34No ratings yet
- Infosys Analysis For Finlatics FMEPDocument5 pagesInfosys Analysis For Finlatics FMEPyogeshNo ratings yet
- Xiaomi WP - 9182 of 2022Document34 pagesXiaomi WP - 9182 of 2022Arjav JainNo ratings yet
- Life Below Water: Verlin Andre Africa Simon Marquis Lumbera Rhona Mae Panopio Ais1ADocument14 pagesLife Below Water: Verlin Andre Africa Simon Marquis Lumbera Rhona Mae Panopio Ais1ASimon Marquis LUMBERANo ratings yet
- Asme 2a - Sa-350 PDFDocument12 pagesAsme 2a - Sa-350 PDFEswaran100% (1)
- ORLANDI Catalogue Blue en-DEDocument44 pagesORLANDI Catalogue Blue en-DEtinashemambarizaNo ratings yet
- Managing Organisation Case-Study-QuestionDocument4 pagesManaging Organisation Case-Study-QuestionFazida SalimNo ratings yet
- Submitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Document38 pagesSubmitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Vipul PartapNo ratings yet
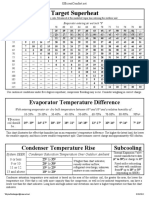
- Charging and TD Chart PlusDocument1 pageCharging and TD Chart PlusFaquruddin AliNo ratings yet
- AFFLE - Investor Presentation - FY21Document19 pagesAFFLE - Investor Presentation - FY21Abhishek MurarkaNo ratings yet





















































































Download as pdf or txt
You might also like
- BIGO LIVE Broadcaster AgreementDocument5 pagesBIGO LIVE Broadcaster Agreements zamanNo ratings yet
- The Philosophy of Andy WarholDocument1 pageThe Philosophy of Andy WarholMos Catalina0% (2)
- Hkdse English Reading全方位實戰神技精讀 主筆記 Sample 1643026918Document23 pagesHkdse English Reading全方位實戰神技精讀 主筆記 Sample 1643026918SupercellNo ratings yet
- PID Controller Based DC Motor Speed ControlDocument4 pagesPID Controller Based DC Motor Speed ControlEditor IJRITCCNo ratings yet
- Motor DC PID System Regulator For Mini Conveyor Drive Based-On MatlabDocument6 pagesMotor DC PID System Regulator For Mini Conveyor Drive Based-On MatlabGifhar RahmanNo ratings yet
- 4426 15682 1 PBDocument9 pages4426 15682 1 PBmuhammad akbarNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: January 2015EngidNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: January 2015lovely personNo ratings yet
- Irjet V2i8242 PDFDocument6 pagesIrjet V2i8242 PDFAhmed Osama MikawiNo ratings yet
- Analysis of Speed Control of DC Motor - A Review StudyDocument6 pagesAnalysis of Speed Control of DC Motor - A Review StudyRachelNo ratings yet
- DC Motor Speed Control Using PID ControllerDocument7 pagesDC Motor Speed Control Using PID ControllerEditor IJTSRDNo ratings yet
- Speed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Document7 pagesSpeed Control of DC Motor Using Particle Swarm Optimization Technique IJERTV2IS60650Yeduresapu SantoshNo ratings yet
- DC Motor Speed Controller Design Using Pulse WidthDocument12 pagesDC Motor Speed Controller Design Using Pulse WidthHerman BachtiarNo ratings yet
- Modelling and Control of DC Motor Speed and Position For Wheel Mobile Robot ApplicationDocument5 pagesModelling and Control of DC Motor Speed and Position For Wheel Mobile Robot Applicationmusavvirabdul123No ratings yet
- Speed Control of DC Motor Using Pid Controller BasedDocument16 pagesSpeed Control of DC Motor Using Pid Controller Basedayesha amjadNo ratings yet
- DC Motor Speed Control Using PID Controller in Lab View: February 2015Document5 pagesDC Motor Speed Control Using PID Controller in Lab View: February 2015Muhdnursalam ZolkepliNo ratings yet
- DC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerDocument4 pagesDC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerKuganes ChandranNo ratings yet
- Real Time DC Motor Position Control Using Pid Controller in LabviewDocument8 pagesReal Time DC Motor Position Control Using Pid Controller in LabviewCrazyGamer SLNo ratings yet
- DC Motor Pid ControlDocument6 pagesDC Motor Pid ControlSampath KumarNo ratings yet
- Ben Faith PublicationDocument12 pagesBen Faith PublicationSAMPSON BENDORNo ratings yet
- DC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsDocument11 pagesDC Motor Position Control Using Fuzzy Proportional-Derivative Controllers With Different Defuzzification MethodsLele glosyNo ratings yet
- A Project ProposalDocument5 pagesA Project ProposalMuhammad Umer FarooqNo ratings yet
- Speed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodDocument7 pagesSpeed Performance of Three Phase Induction Motor by Using Simplified Vector Control MethodNithyashriNo ratings yet
- Result PPRDocument5 pagesResult PPRMayuri Chauray-shindeNo ratings yet
- Tuning of An Optimal PID Controller With Iterative Feedback Tuning Method For DC MotorDocument5 pagesTuning of An Optimal PID Controller With Iterative Feedback Tuning Method For DC MotorLeonardo GarberoglioNo ratings yet
- CD-24-Main Doc Pid Using ArduinoDocument63 pagesCD-24-Main Doc Pid Using Arduinogxge50% (2)
- GAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFDocument6 pagesGAIN SCHEDULING CONTROLLER DESIGN FOR AN ELECTRIC DRIVE Final PDFGlan DevadhasNo ratings yet
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Document6 pagesLab View Based Speed Control of DC Motor Using PID Controller-1582user01254No ratings yet
- Intelligent Control Strategies For Tuning PID of Speed Control of DC Motor - A ReviewDocument8 pagesIntelligent Control Strategies For Tuning PID of Speed Control of DC Motor - A ReviewArsyad CahyaNo ratings yet
- Design and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLABDocument9 pagesDesign and Simulation of DC Motor Speed Controller Using Pole Placement Technique and MATLAB2K18/EE/244 VIPESH DUNKWALNo ratings yet
- Speed Control of DC Motor Using PIC 16F877A Microcontroller: July 2014Document13 pagesSpeed Control of DC Motor Using PIC 16F877A Microcontroller: July 2014DUY LÊ KHÁNHNo ratings yet
- Control BLDC Motor Speed Using PID ControllerDocument6 pagesControl BLDC Motor Speed Using PID Controllertaddese bekeleNo ratings yet
- Camera Movement Control Using PID Controller in LabVIEWDocument5 pagesCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDNo ratings yet
- DE Sem 6 ReportDocument26 pagesDE Sem 6 ReportKotadia ShivamNo ratings yet
- DC Motor Closed LoopDocument11 pagesDC Motor Closed Looprichard chombaNo ratings yet
- Induction MotorDocument5 pagesInduction MotorNeha GuptaNo ratings yet
- Speed Control of DC Motor Using Optimization Techniques Based PID ControllerDocument8 pagesSpeed Control of DC Motor Using Optimization Techniques Based PID ControllerAsha PatilNo ratings yet
- Brushless DC Motor Speed Control Using Both PI ConDocument8 pagesBrushless DC Motor Speed Control Using Both PI ConDrishyaNo ratings yet
- Monitoring and Control of A Variable Frequency Drive Using PLC and ScadaDocument8 pagesMonitoring and Control of A Variable Frequency Drive Using PLC and ScadaPiero AlarconNo ratings yet
- Comparative Analysis of Speed Control Techniques of DC Motors With MatlabDocument4 pagesComparative Analysis of Speed Control Techniques of DC Motors With Matlabsrinureddy2014No ratings yet
- Optimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationDocument6 pagesOptimal Tuning of PI Controller For Speed Control of DC Motor Drive Using Particle Swarm OptimizationLIEW HUI FANG UNIMAPNo ratings yet
- Synopsis PPT 4Document7 pagesSynopsis PPT 4Appu SpecialNo ratings yet
- DC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerDocument6 pagesDC Motor Speed Control: A Case Between PID Controller and Fuzzy Logic ControllerFirman IlyasNo ratings yet
- ProposalDocument3 pagesProposalIbrar younisNo ratings yet
- Implementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveDocument14 pagesImplementation of Pid Trained Artificial Neural Network Controller For Different DC Motor DriveGery VerzaztNo ratings yet
- Speed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961Document6 pagesSpeed Control of Three Phase Induction Motor Using Fuzzy Pid Controller IJERTV2IS110961NithyashriNo ratings yet
- Ushless DC Motor Speed Control Using Both PIDocument7 pagesUshless DC Motor Speed Control Using Both PINxj CfcNo ratings yet
- Control Report 045Document4 pagesControl Report 045HybaibNo ratings yet
- Comparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527Document6 pagesComparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527DIVYA PRASOONA CNo ratings yet
- Lab Report Control IDocument19 pagesLab Report Control Iridzwan abuNo ratings yet
- PID Based Dynamometer Used in Engine TestDocument7 pagesPID Based Dynamometer Used in Engine TestAyeshá KhánNo ratings yet
- Speed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationDocument5 pagesSpeed Control Simulation of DC Servomotor Using Hybrid PID-Fuzzy With ITAE Polynomials InitializationWahyunggoro ONo ratings yet
- Fuzzy PID Supervised Online ANFIS Based Speed Controller For Brushless DC MotorDocument35 pagesFuzzy PID Supervised Online ANFIS Based Speed Controller For Brushless DC MotorMuthukumariNo ratings yet
- Design and Implementation of An Improved Automatic DC Motor Speed Control Systems Using MicrocontrollerDocument13 pagesDesign and Implementation of An Improved Automatic DC Motor Speed Control Systems Using MicrocontrollerKIU PUBLICATION AND EXTENSIONNo ratings yet
- Speed and Position Control of DC Motor Using LabVIEW-IJRASETDocument8 pagesSpeed and Position Control of DC Motor Using LabVIEW-IJRASETIJRASETPublicationsNo ratings yet
- Design of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueDocument15 pagesDesign of PID Controller For Automatic Voltage Regulator and Validation Using Hardware in The Loop TechniqueroyclhorNo ratings yet
- Labview Based Speed Control of DC Motor Using Pid ControllerDocument7 pagesLabview Based Speed Control of DC Motor Using Pid ControllerCrazyGamer SLNo ratings yet
- Speed and Position Control of A DC Motor Using ATmega328Document5 pagesSpeed and Position Control of A DC Motor Using ATmega328GRD JournalsNo ratings yet
- Control of DC Motor Using Genetic Algorithm Based PID ControllerDocument7 pagesControl of DC Motor Using Genetic Algorithm Based PID ControllerKhiêm NguyễnNo ratings yet
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocument7 pagesSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieNo ratings yet
- Speed Control of A 2HP DC MotorDocument25 pagesSpeed Control of A 2HP DC MotorEdul BrianNo ratings yet
- Seminar ReportDocument23 pagesSeminar ReportSwapnil Behera100% (1)
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Gupta R. S., Principles of Structural Design Wood, Steel, and Concrete, 2nd Ed, 2014Document58 pagesGupta R. S., Principles of Structural Design Wood, Steel, and Concrete, 2nd Ed, 2014reyNo ratings yet
- 4357r 85 PDFDocument14 pages4357r 85 PDFFred PrzNo ratings yet
- Virtual Screening of FOXO3a Activators From Natural Product Like Compound LibraryDocument16 pagesVirtual Screening of FOXO3a Activators From Natural Product Like Compound Libraryelbizco8No ratings yet
- SPC SpreadsheetDocument10 pagesSPC SpreadsheetSpyros IliakisNo ratings yet
- Mixed Banking:: System Refers To That Banking System Under Which TheDocument7 pagesMixed Banking:: System Refers To That Banking System Under Which TheLOKESH RAMNo ratings yet
- DSA Weekly PlanDocument3 pagesDSA Weekly PlanJatin0% (1)
- 5) Freshmen Sem 2 - Skills Employability (Sas)Document5 pages5) Freshmen Sem 2 - Skills Employability (Sas)Crislyn Jilou Bugas AdlawanNo ratings yet
- NORTH NEGROS SUGAR CO V HIDALGO FULL TEXTDocument29 pagesNORTH NEGROS SUGAR CO V HIDALGO FULL TEXTKiethe MyraNo ratings yet
- Technical Proposal 1Document2 pagesTechnical Proposal 1syed khalilNo ratings yet
- Amalgamador LM1237Document42 pagesAmalgamador LM1237valam ltdaNo ratings yet
- GR 190080Document9 pagesGR 190080Arvi MendezNo ratings yet
- HKOH SNDL Int ReqDocument2 pagesHKOH SNDL Int ReqMuhammad AsfandyarNo ratings yet
- LCE Decline To Issue Preventive SuspensionDocument4 pagesLCE Decline To Issue Preventive SuspensionJem YuloNo ratings yet
- 042 Myrmidon (Elf Class)Document3 pages042 Myrmidon (Elf Class)VikshadeNo ratings yet
- Cornetto MixDocument2 pagesCornetto Mixnitin salujaNo ratings yet
- Collimator Instruction Manuals PDFDocument160 pagesCollimator Instruction Manuals PDFNauman100% (1)
- LAB 6 7-ElectroMechanical PneumaticDocument9 pagesLAB 6 7-ElectroMechanical PneumaticBien MedinaNo ratings yet
- Fibre Optics - PDFDocument56 pagesFibre Optics - PDFgroverpranjal34No ratings yet
- Infosys Analysis For Finlatics FMEPDocument5 pagesInfosys Analysis For Finlatics FMEPyogeshNo ratings yet
- Xiaomi WP - 9182 of 2022Document34 pagesXiaomi WP - 9182 of 2022Arjav JainNo ratings yet
- Life Below Water: Verlin Andre Africa Simon Marquis Lumbera Rhona Mae Panopio Ais1ADocument14 pagesLife Below Water: Verlin Andre Africa Simon Marquis Lumbera Rhona Mae Panopio Ais1ASimon Marquis LUMBERANo ratings yet
- Asme 2a - Sa-350 PDFDocument12 pagesAsme 2a - Sa-350 PDFEswaran100% (1)
- ORLANDI Catalogue Blue en-DEDocument44 pagesORLANDI Catalogue Blue en-DEtinashemambarizaNo ratings yet
- Managing Organisation Case-Study-QuestionDocument4 pagesManaging Organisation Case-Study-QuestionFazida SalimNo ratings yet
- Submitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Document38 pagesSubmitted By-Rashmi Parmar (8601) Trisha Sinha Roy (8629) Sanchari Mohanta (8631) Raunak Shirali (8609) Karan Khot (8615) Swapnil Kulkarni (8625)Vipul PartapNo ratings yet
- Charging and TD Chart PlusDocument1 pageCharging and TD Chart PlusFaquruddin AliNo ratings yet
- AFFLE - Investor Presentation - FY21Document19 pagesAFFLE - Investor Presentation - FY21Abhishek MurarkaNo ratings yet