Download as pdf or txt
You might also like
- Forza XADV 750 - 2021 Honda Smartkey Wiring Diagram SystemDocument23 pagesForza XADV 750 - 2021 Honda Smartkey Wiring Diagram SystemAny TimNo ratings yet
- Samsung Electronics Using Affinity Diagrams and Pareto ChartsDocument7 pagesSamsung Electronics Using Affinity Diagrams and Pareto Chartsamadea50% (2)
- Servo-Drive-Systems Ch1 Outline PDFDocument12 pagesServo-Drive-Systems Ch1 Outline PDFcườngNo ratings yet
- Robot Cell Design and ControlDocument30 pagesRobot Cell Design and Controlnandkishor joshi67% (3)
- DC Servo Motor Position SystemDocument28 pagesDC Servo Motor Position SystemVincent Korie100% (2)
- Manual FY8250CDocument44 pagesManual FY8250Cnumelemeu1974No ratings yet
- Session04 - MET437-Introduction To Servo Systems (Motion Control)Document15 pagesSession04 - MET437-Introduction To Servo Systems (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Session01 MET437-Introduction To Servo Systems (Motion Control)Document14 pagesSession01 MET437-Introduction To Servo Systems (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Mechanical Structural Analysis AND Design Optimization: OF Industrial RobotsDocument29 pagesMechanical Structural Analysis AND Design Optimization: OF Industrial RobotsAhsan AmjadNo ratings yet
- LAB Report 7Document18 pagesLAB Report 7razakhan5114No ratings yet
- Lab Report 6Document14 pagesLab Report 6razakhan5114No ratings yet
- Servo Mechanics and BLDC MotorDocument19 pagesServo Mechanics and BLDC MotorParth MehtaNo ratings yet
- A Sliding Mode Controller For A Three Phase Induction MotorDocument4 pagesA Sliding Mode Controller For A Three Phase Induction MotorirfanangpNo ratings yet
- Principal of Operation Implementation Overview Objectives of The Thesis Basic HardwareDocument4 pagesPrincipal of Operation Implementation Overview Objectives of The Thesis Basic HardwareAbul KashemNo ratings yet
- Robot Cell DesignDocument25 pagesRobot Cell Designnandkishor joshi100% (1)
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocument11 pagesWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushNo ratings yet
- Objective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)Document3 pagesObjective: Theory:: Indian Institute of Information Technology, Design & Manufacturing, Jabalpur (M.P.)Ansh NarulaNo ratings yet
- Servo Tuning TutorialDocument38 pagesServo Tuning TutorialpranavNo ratings yet
- A Study in Industrial Robot ProgrammingDocument26 pagesA Study in Industrial Robot ProgrammingPatel Dhaval100% (1)
- Devise Illustrate 6: A Report To The Application of Any Motor in Industry/ AppliancesDocument5 pagesDevise Illustrate 6: A Report To The Application of Any Motor in Industry/ AppliancesViolet ShaikhNo ratings yet
- Assignment On Servo Motor: January 2018Document4 pagesAssignment On Servo Motor: January 2018Simagn BekeleNo ratings yet
- Powerpoint Presentation : Topic:-Servomechanism and Control SystemsDocument13 pagesPowerpoint Presentation : Topic:-Servomechanism and Control SystemsAhsan MalikNo ratings yet
- 5 Digital Position ControlDocument2 pages5 Digital Position ControlAnonymous 6pVZ96GNo ratings yet
- Chapter1 121210210811 Phpapp02Document57 pagesChapter1 121210210811 Phpapp02sharkeraNo ratings yet
- Command Shaping Techniques For Vibration Control of A Exible Robot ManipulatorDocument22 pagesCommand Shaping Techniques For Vibration Control of A Exible Robot ManipulatorsaeedNo ratings yet
- Unit 1 Part 1.2Document6 pagesUnit 1 Part 1.2Abhishek KumarNo ratings yet
- Robots in WeldingDocument12 pagesRobots in WeldingRehan SharmaNo ratings yet
- General Motion ControlDocument105 pagesGeneral Motion Controlayyalu samyNo ratings yet
- 2092-At001 - En-P Ab Simple Motion Control PLC BasedDocument5 pages2092-At001 - En-P Ab Simple Motion Control PLC BasedCristopher EntenaNo ratings yet
- Intro To CNC and Main Parts of CNCDocument18 pagesIntro To CNC and Main Parts of CNCsank_knasNo ratings yet
- Servo MotorDocument15 pagesServo MotorShivshankar GhugeNo ratings yet
- Self Balancing Two Wheeled Robot ReportDocument11 pagesSelf Balancing Two Wheeled Robot ReportMateo Agudelo GarcíaNo ratings yet
- Final PresentationDocument103 pagesFinal PresentationQasir NawazNo ratings yet
- Ia&c Unit 5Document17 pagesIa&c Unit 5Pradhunya KambleNo ratings yet
- Development of Microprocessor, Time Optimized Stepper Motor Driving AlgorithmDocument6 pagesDevelopment of Microprocessor, Time Optimized Stepper Motor Driving AlgorithmDaniel Alejandro RodriguezNo ratings yet
- Servo and Stepper Motors 2Document19 pagesServo and Stepper Motors 2JBS SPOBINo ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- Implementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmDocument7 pagesImplementationof Position Control Servo DCMotorwith PIDControllerto Humanoid Robot ArmMustafa AlhumayreNo ratings yet
- Servomotor: Rotary ActuatorDocument2 pagesServomotor: Rotary ActuatorIan Jerome Fallarcuna BuronNo ratings yet
- Lecture 4Document14 pagesLecture 4mahad adam OmariNo ratings yet
- Fundamentals of Industrial Robotics - Session 2 - Motion Control and Controller Functions PDFDocument40 pagesFundamentals of Industrial Robotics - Session 2 - Motion Control and Controller Functions PDFAnonymous m9rvPncNo ratings yet
- Letter Bulu ConstructionDocument26 pagesLetter Bulu ConstructionsarojpapuNo ratings yet
- Manual DLB 2126b - Servocontrolador - enDocument22 pagesManual DLB 2126b - Servocontrolador - enGustavo Cruz AguilarNo ratings yet
- Vector ControlDocument10 pagesVector ControlLove Shrimali0% (1)
- Application Note Roll FormingDocument2 pagesApplication Note Roll FormingAk47No ratings yet
- Servo MotorDocument8 pagesServo MotorzaidNo ratings yet
- M4 - Path PlanningDocument10 pagesM4 - Path PlanningKenneth C.LinojNo ratings yet
- Wiki - DC Servomotor ControllerDocument11 pagesWiki - DC Servomotor Controllerm.mignecoNo ratings yet
- Parts of A Robot, DOF, Classifying Robots PDFDocument71 pagesParts of A Robot, DOF, Classifying Robots PDFAswath SridharNo ratings yet
- Integrated Speed - Position Tracking With Trajectory Generation and Synchronization For 2 - Axis DC Motion ControlDocument6 pagesIntegrated Speed - Position Tracking With Trajectory Generation and Synchronization For 2 - Axis DC Motion ControlIJERDNo ratings yet
- ServomechanismDocument4 pagesServomechanismJermaine StrachanNo ratings yet
- What A Servo Motor Is in Simple TermsDocument1 pageWhat A Servo Motor Is in Simple TermsRufat SafaraliyevNo ratings yet
- Tm400 The Basics of Motion ControlDocument53 pagesTm400 The Basics of Motion ControlEdward ArmijoNo ratings yet
- Servo Drive: FunctionDocument2 pagesServo Drive: FunctionBrahmanand SinghNo ratings yet
- Automation System Design - 2 - 1709737440783Document37 pagesAutomation System Design - 2 - 1709737440783Vaishnavi CharyaNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- The CNC h4 SystemDocument8 pagesThe CNC h4 SystemRobert GiangNo ratings yet
- Onofacabininaship, H, Self Balancing Robots, For Future Transport Systems Like S and JDocument20 pagesOnofacabininaship, H, Self Balancing Robots, For Future Transport Systems Like S and JGirish JoshiNo ratings yet
- Servo Motor ControlDocument72 pagesServo Motor ControlTien-Thinh NguyenNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Session05 - MET437-Servo Motor Control (Motion Control)Document20 pagesSession05 - MET437-Servo Motor Control (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Session01 MET437-Introduction To Servo Systems (Motion Control)Document14 pagesSession01 MET437-Introduction To Servo Systems (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Session03 - MET437-Bode Plot and Margin Stability (Motion Control)Document18 pagesSession03 - MET437-Bode Plot and Margin Stability (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Session00 - MET437 Course Specs and Learning Outcoms (Motion Control)Document9 pagesSession00 - MET437 Course Specs and Learning Outcoms (Motion Control)Ahmad A. Al-AteeqiNo ratings yet
- Leoch LP2-250Document2 pagesLeoch LP2-250Ahcène MezghicheNo ratings yet
- Retrofit BMW F10 DEC Switch For Normal Sport ModesDocument3 pagesRetrofit BMW F10 DEC Switch For Normal Sport Modesobd365No ratings yet
- Improve Service Continuity With Eaton's Pad-Mounted NOVA ReclosersDocument1 pageImprove Service Continuity With Eaton's Pad-Mounted NOVA ReclosersjlcegarraNo ratings yet
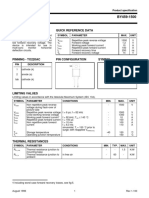
- Rectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataDocument6 pagesRectifier Diode BY459-1500 Fast, High-Voltage: General Description Quick Reference DataRusmiyanto YantoNo ratings yet
- Mach3 USB CNC ControllerDocument14 pagesMach3 USB CNC ControllerZaw Min NaingNo ratings yet
- Mu350 1Document2 pagesMu350 1kresekjoy2No ratings yet
- Report 2Document19 pagesReport 2Logan DassNo ratings yet
- Installation and Operation Manual: Addressable Two Loop Fire PanelDocument100 pagesInstallation and Operation Manual: Addressable Two Loop Fire PanelMauricioDinizNo ratings yet
- Balluf Manual BookDocument42 pagesBalluf Manual BookRizky AndreanNo ratings yet
- Few Basics: - Real Power (P) - Reactive Power (Q) - Frequency (F) - Voltage (V)Document21 pagesFew Basics: - Real Power (P) - Reactive Power (Q) - Frequency (F) - Voltage (V)gavinilaaNo ratings yet
- Adobe Scan 26-Apr-2024Document1 pageAdobe Scan 26-Apr-2024amayaimaneulNo ratings yet
- 10 TS LTPB For 220 66KV S SDocument20 pages10 TS LTPB For 220 66KV S Skhaled3601No ratings yet
- Motor2 PDFDocument2 pagesMotor2 PDFsherub wangdiNo ratings yet
- Measurement of Level in A Tank Using Capacitive Type Level ProbeDocument13 pagesMeasurement of Level in A Tank Using Capacitive Type Level ProbeChandra Sekar100% (1)
- IEC CatalogueDocument38 pagesIEC Cataloguejohn_serafica7104100% (1)
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityCynosure SkyNo ratings yet
- CHN110 W Plans 1v1 141119Document8 pagesCHN110 W Plans 1v1 141119EduardoNo ratings yet
- Irrigation Pump ERBA EIP 2 - Service ManualDocument56 pagesIrrigation Pump ERBA EIP 2 - Service ManualDodik E. PrasetyoNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Solis-1P (4-5) K-4G: Solis Single Phase InvertersDocument2 pagesSolis-1P (4-5) K-4G: Solis Single Phase InvertersNadia NogueiraNo ratings yet
- Semiconductor Technical Data: L SuffixDocument12 pagesSemiconductor Technical Data: L SuffixSuwandra I Gede PutuNo ratings yet
- Touch On Touch Off Switch Using 555 Timer IC: Components RequiredDocument1 pageTouch On Touch Off Switch Using 555 Timer IC: Components RequiredDanica De GuzmanNo ratings yet
- Basso-557 TOCDocument9 pagesBasso-557 TOCVIJAYPUTRANo ratings yet
- Nominal Candidate Form: DateDocument10 pagesNominal Candidate Form: DateMoses MussNo ratings yet
- SK Wall Mounted Cooling Unit 3203 - 3204 - 3205 - 3206Document8 pagesSK Wall Mounted Cooling Unit 3203 - 3204 - 3205 - 3206koniks519No ratings yet
- Sheet #1 SolutionDocument5 pagesSheet #1 Solutionسام النعمانNo ratings yet
- Socomec Delphys GP 2.0 500kva Control PanelDocument20 pagesSocomec Delphys GP 2.0 500kva Control PanelsharifmousaviNo ratings yet