Download as pdf or txt
You might also like
- Classification of Signals & SystemsDocument82 pagesClassification of Signals & SystemsRaja Desingu94% (16)
- Unit I - Classification of Signals and SystemsDocument45 pagesUnit I - Classification of Signals and SystemsAswath selvaNo ratings yet
- Digital Signal Processing: Discussion #2 Discrete Time Signals & Systems Tarun Choubisa Dept. of ETC, KIIT UniversityDocument39 pagesDigital Signal Processing: Discussion #2 Discrete Time Signals & Systems Tarun Choubisa Dept. of ETC, KIIT Universitymyself a student of btech 1st yr100% (1)
- CommunicationDocument18 pagesCommunicationSamah Abu SaleemNo ratings yet
- Eleg3124 Ch1 SignalsDocument42 pagesEleg3124 Ch1 SignalsPhương Nguyễn HữuNo ratings yet
- Lec 2 CH 2Document37 pagesLec 2 CH 2Aimen AnwarNo ratings yet
- Prerequisite: Basic Background in Calculus, Complex Numbers and Some Exposure To Differential EquationsDocument48 pagesPrerequisite: Basic Background in Calculus, Complex Numbers and Some Exposure To Differential EquationsSatyanarayana GurramNo ratings yet
- Lect1 SignalProcessingDocument82 pagesLect1 SignalProcessingEng:Mostafa Morsy MohamedNo ratings yet
- COM336 Lecture 1Document65 pagesCOM336 Lecture 1Hamid AwanNo ratings yet
- S&S - Week 3Document41 pagesS&S - Week 3machasong98No ratings yet
- Unit I Classification of Signals & SystemsDocument52 pagesUnit I Classification of Signals & SystemsSekar GanapathyNo ratings yet
- Analisis Spektrum Sinyal Digital - Pertemuan 1Document23 pagesAnalisis Spektrum Sinyal Digital - Pertemuan 1Adji NugrohoNo ratings yet
- Ch. 1 SignalsDocument68 pagesCh. 1 SignalsAhmad DaraNo ratings yet
- Section ADocument70 pagesSection AAyaneNo ratings yet
- Signal&SystemsDocument59 pagesSignal&Systemsبدر عسيريNo ratings yet
- Lecture 1Document33 pagesLecture 1Farooq GhaziNo ratings yet
- EEE331 Lecture 1Document66 pagesEEE331 Lecture 1tolugenNo ratings yet
- Signals and Systems: Dr. Mohamed Bingabr University of Central OklahomaDocument44 pagesSignals and Systems: Dr. Mohamed Bingabr University of Central OklahomaadhomeworkNo ratings yet
- Chapter OneDocument22 pagesChapter OneMedhanyeNo ratings yet
- Signals and SystemsDocument67 pagesSignals and Systemsyadagiri devarakondaNo ratings yet
- Signals and Systems - TadepallegudemDocument22 pagesSignals and Systems - TadepallegudemSiva PrasadNo ratings yet
- Signals and System: Basics DR - Suja PDocument99 pagesSignals and System: Basics DR - Suja PVishal CNo ratings yet
- Signals and Systems EE-315: Muhammad Asim Butt Asim - Butt@umt - Edu.pkDocument28 pagesSignals and Systems EE-315: Muhammad Asim Butt Asim - Butt@umt - Edu.pkFAISAL RAHIMNo ratings yet
- Principle of Communication EngineeringDocument52 pagesPrinciple of Communication Engineeringسعيد ابوسريعNo ratings yet
- Digital Signal ProcessingDocument54 pagesDigital Signal Processingshivam vashistNo ratings yet
- Eleg3124 Lecture NotesDocument244 pagesEleg3124 Lecture NotesEnchanted to GoldNo ratings yet
- Signal Analysis: Lesson 1Document57 pagesSignal Analysis: Lesson 1Mahardhika19 RizkyNo ratings yet
- Signals & SystemsDocument55 pagesSignals & SystemsWaqas Akram GondalNo ratings yet
- Let Ure ReviewDocument62 pagesLet Ure ReviewLuu HarryNo ratings yet
- Classification of Signals SystemsDocument77 pagesClassification of Signals Systemsrajalakshmi boopathiNo ratings yet
- Signal and Systems: Dr. Avinash Chandra Assistant Professor (Senior) SENSE, VIT VelloreDocument30 pagesSignal and Systems: Dr. Avinash Chandra Assistant Professor (Senior) SENSE, VIT VelloreSathwik YadalamNo ratings yet
- SS#1Document63 pagesSS#1HT Fyahya YahyaNo ratings yet
- Classification of Signals & SystemsDocument82 pagesClassification of Signals & SystemsNanmaran RajendiranNo ratings yet
- Sinyal Waktu Diskret Sinyal Dan Sistem: Achmad Hidayatno Departemen Teknik Elektro Undip SemarangDocument63 pagesSinyal Waktu Diskret Sinyal Dan Sistem: Achmad Hidayatno Departemen Teknik Elektro Undip SemarangEmiranza PutragazzaNo ratings yet
- Unit 1Document30 pagesUnit 1swapnil jainNo ratings yet
- Chapter 1 - Introduction To Signals and SystemsDocument51 pagesChapter 1 - Introduction To Signals and Systemsmoganraj8munusamyNo ratings yet
- Chapter 1. Digital Control System-1Document79 pagesChapter 1. Digital Control System-1Dereje Shiferaw100% (1)
- Signals and Systems-I PDFDocument94 pagesSignals and Systems-I PDFAnusha BaduguNo ratings yet
- Lecture Contents: Signals and SystemsDocument40 pagesLecture Contents: Signals and SystemsFahad KhanNo ratings yet
- Signals and System Lecture 1Document16 pagesSignals and System Lecture 1Talha hayatNo ratings yet
- Lecture 2 SignalsandSystems - PPTX - AnnotatedDocument25 pagesLecture 2 SignalsandSystems - PPTX - AnnotatedAkash PerlaNo ratings yet
- Course 1: Generalities About Signals and SystemsDocument17 pagesCourse 1: Generalities About Signals and SystemsnourcheraNo ratings yet
- Unit-1: Digital Signal Processor Class NotesDocument31 pagesUnit-1: Digital Signal Processor Class NotesksrmuruganNo ratings yet
- Wa0003Document64 pagesWa0003dileep kumarNo ratings yet
- Digital Signal Processing 1st LecDocument23 pagesDigital Signal Processing 1st LecIhsan ul HaqNo ratings yet
- Introduction To Signals: Mansoor Khan EEE352 Analog Communication SystemsDocument49 pagesIntroduction To Signals: Mansoor Khan EEE352 Analog Communication Systemsali_rehman87100% (1)
- Type of Signals and SystemsDocument24 pagesType of Signals and SystemsAlee OnlineShopNo ratings yet
- Classification of Signals Part 1Document15 pagesClassification of Signals Part 1Ajay Kumar RNo ratings yet
- Classification of Signals & Systems: PresentationDocument36 pagesClassification of Signals & Systems: PresentationRajeeNo ratings yet
- Classification of Signals & Systems: PresentationDocument36 pagesClassification of Signals & Systems: PresentationRamya NNo ratings yet
- Unit 1 - Discrete Time Signals and SystemsDocument77 pagesUnit 1 - Discrete Time Signals and Systemschandrani deyNo ratings yet
- Signals and SystemsDocument40 pagesSignals and SystemsAmeen PeNo ratings yet
- Ch1 SS IntroductionDocument65 pagesCh1 SS IntroductionVõ Đình VũNo ratings yet
- Signals and SystemsDocument10 pagesSignals and SystemsLe NamNo ratings yet
- Signals and Systems Unit 2: Mit-WpuDocument31 pagesSignals and Systems Unit 2: Mit-WpuZaheen KhanNo ratings yet
- SEE 3533 - IntroDocument44 pagesSEE 3533 - Intronadiatulhuda_luqman6794No ratings yet
- 2-Classification of Signals and Systems-05!01!2024Document67 pages2-Classification of Signals and Systems-05!01!2024rupinsgmNo ratings yet
- Introduction To Signals & Variables Lec 1Document27 pagesIntroduction To Signals & Variables Lec 1seltyNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Social Network Analysis Ii: MTP Ismu Rini Dwi Ari Jurusan Perencanaan Wilayah Dan Kota FtubDocument32 pagesSocial Network Analysis Ii: MTP Ismu Rini Dwi Ari Jurusan Perencanaan Wilayah Dan Kota FtubfikrunnisaNo ratings yet
- Physa S 20 02188Document20 pagesPhysa S 20 02188Mehmet ErtaşNo ratings yet
- A 1Document2 pagesA 1Phong PiloNo ratings yet
- VRLA - Operating Instruction - Engl (Incluyento S100L, Solo Inglés... )Document7 pagesVRLA - Operating Instruction - Engl (Incluyento S100L, Solo Inglés... )David MonederoNo ratings yet
- Ficha Tecnica GENIE Z-3422NDocument2 pagesFicha Tecnica GENIE Z-3422NChristian Muñoz EquimmatNo ratings yet
- Fertigation in Horticultural CropsDocument15 pagesFertigation in Horticultural CropstellashokNo ratings yet
- ALM 12 Benchmark Testing Tool DocumentationDocument22 pagesALM 12 Benchmark Testing Tool DocumentationjosephNo ratings yet
- Solving Multi-Dimensional Problems of Gas Dynamics Using MATLABDocument40 pagesSolving Multi-Dimensional Problems of Gas Dynamics Using MATLABMahmoud Abd El LateefNo ratings yet
- Stem PDFDocument16 pagesStem PDFPhoemela Joyce Roa LustreNo ratings yet
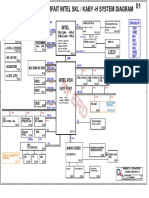
- Power Pavilion Parfait Intel SKL / Kaby - H System DiagramDocument52 pagesPower Pavilion Parfait Intel SKL / Kaby - H System DiagramAbnesis NesisNo ratings yet
- Week 5 - Design For Sls 2Document28 pagesWeek 5 - Design For Sls 2Luqman NHNo ratings yet
- QJAR's Robot CatalogueDocument6 pagesQJAR's Robot CatalogueVioleta Marinkovic Ex SavicicNo ratings yet
- Magnesium Sterate Mixing in V BlenderDocument12 pagesMagnesium Sterate Mixing in V Blendermaneshdixit4312No ratings yet
- MarimbaDocument13 pagesMarimbarolaescobar16120% (1)
- Discharge CoefficientDocument2 pagesDischarge Coefficientموسى جعفر احمد محمدNo ratings yet
- Ye Tu19 Turning IDocument36 pagesYe Tu19 Turning IferNo ratings yet
- 3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersDocument2 pages3.2.9. Rubber Closures For Containers For Aqueous Parenteral Preparations, For Powders and For Freeze-Dried PowdersG_RanjithNo ratings yet
- (ACOT'22) Part 1 - Bronze Tier SolnsDocument12 pages(ACOT'22) Part 1 - Bronze Tier SolnsAnju GuptaNo ratings yet
- Plant Model Matlab: Transfer FunctionDocument11 pagesPlant Model Matlab: Transfer FunctionHussain Bin AliNo ratings yet
- Calcium + Vitamin D3Document2 pagesCalcium + Vitamin D3Jai KumarNo ratings yet
- IMPORTANTE. Environment and ControversiesDocument7 pagesIMPORTANTE. Environment and ControversiesWellyngtonNo ratings yet
- ClockGating CtsDocument8 pagesClockGating CtsSrikanth Reddy SarabudlaNo ratings yet
- Power Topologies HandbookDocument199 pagesPower Topologies HandbookCarlos OrtegaNo ratings yet
- Nso Class-7Document3 pagesNso Class-7Swati AshtakeNo ratings yet
- Akumulator Sa HidrogenomDocument6 pagesAkumulator Sa Hidrogenombhstudent_537083349No ratings yet
- 9 Real and Virtual ImageDocument3 pages9 Real and Virtual Imagepiravin kNo ratings yet
- Lecture 05 Electric FluxDocument52 pagesLecture 05 Electric FluxNova PiattosNo ratings yet
- ASME Specification For Fastener MaterialsDocument11 pagesASME Specification For Fastener MaterialsAnonymous IwqK1Nl100% (1)
- Basis Trading BasicsDocument51 pagesBasis Trading BasicsTajinder SinghNo ratings yet
- Civil Design That Puts You in The Passing LaneDocument4 pagesCivil Design That Puts You in The Passing Lanebbutros_317684077No ratings yet