Download as pdf or txt
You might also like
- Mastering Physics Ch14Document12 pagesMastering Physics Ch14apuszis100% (1)
- Goldstein Classical Mechanics NotesDocument7 pagesGoldstein Classical Mechanics NotesQiulin Lu0% (3)
- The Problem Background of The StudyDocument9 pagesThe Problem Background of The StudyBrayan CaceresNo ratings yet
- Eye of LongingDocument20 pagesEye of LongingdlaveryNo ratings yet
- The Heterotopic Space of Chirag DelhiDocument52 pagesThe Heterotopic Space of Chirag DelhiSelina AbigailNo ratings yet
- A. Pogorelov-Geometry PDFDocument317 pagesA. Pogorelov-Geometry PDFThirdocean100% (2)
- Universal Polar Stereographic Co-Ordinate SystemDocument19 pagesUniversal Polar Stereographic Co-Ordinate SystemUzair UllahNo ratings yet
- Lec02 PDFDocument6 pagesLec02 PDFEka MarlyanaNo ratings yet
- A Derivation of The Navier-Stokes Equations: Neal ColemanDocument7 pagesA Derivation of The Navier-Stokes Equations: Neal ColemanEmmanuel IgweNo ratings yet
- Physics P2 Cheat SheetDocument33 pagesPhysics P2 Cheat SheetfullnameisitNo ratings yet
- Relativity 4Document9 pagesRelativity 4sudaisshenwari917No ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFSk Suraj SinghNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFCSharp DevelopersNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFBuddhadeb RoyNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFHarbir Singh ParmarNo ratings yet
- Relativity4 PDFDocument9 pagesRelativity4 PDFBuddhadeb RoyNo ratings yet
- Relativity4 2Document9 pagesRelativity4 2Kafka FlippyNo ratings yet
- 1.introduction To RotationDocument5 pages1.introduction To RotationAswath SNo ratings yet
- Notes On Analytical MechanicsDocument58 pagesNotes On Analytical Mechanicsrounaqul2020ipadNo ratings yet
- Quals 2013 Sec 1Document15 pagesQuals 2013 Sec 1paimoNo ratings yet
- Lecture Notes For PHY 405 Classical MechanicsDocument14 pagesLecture Notes For PHY 405 Classical MechanicsAbhay BhattaraiNo ratings yet
- Chapter 8 - Center of Mass and Linear MomentumDocument21 pagesChapter 8 - Center of Mass and Linear MomentumAnagha GhoshNo ratings yet
- 6 Lecture 6: Momentum and Variable-Mass ProblemsDocument3 pages6 Lecture 6: Momentum and Variable-Mass ProblemsTiagoNo ratings yet
- Summary GenPhys IDocument11 pagesSummary GenPhys IAnthony David Altamirano De La CruzNo ratings yet
- Lecture 16Document23 pagesLecture 16api-26208217No ratings yet
- Relativistic DampingDocument18 pagesRelativistic DampingChrisTselentisNo ratings yet
- ThermodynamicsDocument248 pagesThermodynamicssnehaeslate100% (1)
- Chapter 1: Interactions and Motion: R R R R RDocument13 pagesChapter 1: Interactions and Motion: R R R R RYunsung Francisco JoNo ratings yet
- Physics For Scientists and Engineers: Rotation of A Rigid BodyDocument72 pagesPhysics For Scientists and Engineers: Rotation of A Rigid BodyJ KNo ratings yet
- F DP DT: 10.1.2 ImpulseDocument300 pagesF DP DT: 10.1.2 Impulseluis lacostaNo ratings yet
- MIT16 07F09 Lec14 Rocket MassDocument12 pagesMIT16 07F09 Lec14 Rocket Masscentaurus553587No ratings yet
- Module 1: MechanicsDocument47 pagesModule 1: MechanicsYashi GoswamiNo ratings yet
- Conservation of Energy Problems Worksheet 5Document13 pagesConservation of Energy Problems Worksheet 5Balkis MungurNo ratings yet
- Brandenz1229 - Physics Final Cheat SheetDocument2 pagesBrandenz1229 - Physics Final Cheat SheetSyeda SadiaNo ratings yet
- Motion Along A Straight Line.: AP Physics C Review Equations For MechanicsDocument4 pagesMotion Along A Straight Line.: AP Physics C Review Equations For MechanicsCyou97No ratings yet
- 0054 Handout 6Document14 pages0054 Handout 6zcaptNo ratings yet
- Horizontal Projectile Motion: Comparing Free Fall and Drag ResistanceDocument9 pagesHorizontal Projectile Motion: Comparing Free Fall and Drag ResistanceStephen MwanyeweNo ratings yet
- 1.4 Work and Energy 1Document7 pages1.4 Work and Energy 1ben10uziNo ratings yet
- Dynamics Energy MomentumDocument28 pagesDynamics Energy MomentumCharlotte Frias BenitoNo ratings yet
- Experimental Report 2: F M D V D P M V F D PDocument8 pagesExperimental Report 2: F M D V D P M V F D PThành NguyễnNo ratings yet
- PHM031 - Modern Mechanics - Lecture 5Document19 pagesPHM031 - Modern Mechanics - Lecture 5Mohammed ZaitounNo ratings yet
- AE 430 - Stability and Control Of: Aerospace VehiclesDocument29 pagesAE 430 - Stability and Control Of: Aerospace VehiclesvishwaNo ratings yet
- Lecture Notes For Physical Chemistry II Quantum Theory and SpectroscoptyDocument41 pagesLecture Notes For Physical Chemistry II Quantum Theory and Spectroscopty3334333No ratings yet
- Phys 1011 Linear Momentum NotesDocument4 pagesPhys 1011 Linear Momentum Notesnigusayele06No ratings yet
- Lec 29Document4 pagesLec 29110 RCCNo ratings yet
- 1 - Mechanics Revision NotesDocument5 pages1 - Mechanics Revision NotesHuaxiang HuangNo ratings yet
- Notes 8 ADocument17 pagesNotes 8 AlunaNo ratings yet
- Relativity - Set Ii: Lorentz TransformationsDocument4 pagesRelativity - Set Ii: Lorentz TransformationsArun PillaiNo ratings yet
- b2 MechanicsDocument9 pagesb2 MechanicsSifei ZhangNo ratings yet
- Solutions To Problems in Goldstein, Classical Mechanics, Second EditionDocument70 pagesSolutions To Problems in Goldstein, Classical Mechanics, Second EditionYhunnior RoberthNo ratings yet
- Brief Review of Newtonian MechanicsDocument20 pagesBrief Review of Newtonian Mechanicszijun yuNo ratings yet
- Lesson 1: Momentum & ImpulseDocument5 pagesLesson 1: Momentum & Impulsecattleya abelloNo ratings yet
- Phy MomentumDocument11 pagesPhy MomentumKofoworola MikailNo ratings yet
- Summary of Some Useful Equations: HYPERS301.x Hypersonics - From Shock Waves To ScramjetsDocument16 pagesSummary of Some Useful Equations: HYPERS301.x Hypersonics - From Shock Waves To ScramjetsARUL PRAKASHNo ratings yet
- Simple Harmonic Motion: AnnouncementsDocument14 pagesSimple Harmonic Motion: AnnouncementsAnthony BensonNo ratings yet
- 1.introduction To COMDocument5 pages1.introduction To COMAswath SNo ratings yet
- FormulasheetDocument3 pagesFormulasheetAnnypaola MartinezNo ratings yet
- 8Document22 pages8EA CatalanNo ratings yet
- Lecture12 Physics of Many ParticlesDocument5 pagesLecture12 Physics of Many ParticleshuzaifaalyanhfNo ratings yet
- Goldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesDocument149 pagesGoldstein Classical Mechanics Notes: 1 Chapter 1: Elementary PrinciplesMarcosNo ratings yet
- Introduction To QMDocument3 pagesIntroduction To QMNicholas OwNo ratings yet
- Transport EquationsDocument38 pagesTransport EquationsJahir DipokNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Tarea 1BDocument1 pageTarea 1BJarom SaavedraNo ratings yet
- Lecture 19Document30 pagesLecture 19Jarom SaavedraNo ratings yet
- Lecture 20Document29 pagesLecture 20Jarom SaavedraNo ratings yet
- Lecture 17Document21 pagesLecture 17Jarom SaavedraNo ratings yet
- Lecture 8Document23 pagesLecture 8Jarom SaavedraNo ratings yet
- Lecture 2Document27 pagesLecture 2Jarom SaavedraNo ratings yet
- Engineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunDocument10 pagesEngineering Mechanics: Statics: BNJ 10203 Lecture #9 By, Dalila Mohd HarunFahmi FauziNo ratings yet
- Ch.1 Kinematics PDFDocument71 pagesCh.1 Kinematics PDFrachitNo ratings yet
- Module 3Document10 pagesModule 3Benson MataNo ratings yet
- Rotation of Mode ShapesDocument2 pagesRotation of Mode Shapescelestinodl736No ratings yet
- How To Draw Mohrs Circle With Previous Year Questions Study Notes For GATE SSC JEDocument8 pagesHow To Draw Mohrs Circle With Previous Year Questions Study Notes For GATE SSC JENarendra ChavdaNo ratings yet
- Streamlines and Electric Flux DensityDocument5 pagesStreamlines and Electric Flux DensitySWEETLINE SONIA.M MEC-AP/ECENo ratings yet
- EllipseDocument13 pagesEllipsebonifacio gianga jrNo ratings yet
- 10 Kinamatics of Rotation UCMDocument27 pages10 Kinamatics of Rotation UCMRamachandranPerumalNo ratings yet
- Ordered Pair:-An Ordered Pair Consist of Two Elements in A Fixed OrderDocument19 pagesOrdered Pair:-An Ordered Pair Consist of Two Elements in A Fixed OrderDipinNo ratings yet
- SemicontinuityDocument3 pagesSemicontinuityAbdullah KhanNo ratings yet
- Chapter 4 Highway Geometric Design Part IDocument50 pagesChapter 4 Highway Geometric Design Part IAbush TigabuNo ratings yet
- Vector CalculusDocument25 pagesVector CalculusRAHUL DHANOLANo ratings yet
- Romanian TST Jbmo 2007 SolutionsDocument20 pagesRomanian TST Jbmo 2007 SolutionsTiến Việt PhạmNo ratings yet
- Did Tesla Discover The Secrets of Anti GravityDocument17 pagesDid Tesla Discover The Secrets of Anti GravityBadri J.abu JudehNo ratings yet
- Centroid and Center of Gravity Problems 1 PDFDocument34 pagesCentroid and Center of Gravity Problems 1 PDFHarvy Lucinada100% (3)
- Trigonometry: Michael CorralDocument180 pagesTrigonometry: Michael Corraldarcas75% (4)
- LSMG Final PDFDocument22 pagesLSMG Final PDFYuanqingWuNo ratings yet
- Terminology Civil 3DDocument38 pagesTerminology Civil 3Dsachinsaklani23No ratings yet
- Global Cinema PresentationDocument9 pagesGlobal Cinema PresentationNatallia YeloshynaNo ratings yet
- Chapter-12 Kinematics of A ParticleDocument30 pagesChapter-12 Kinematics of A ParticlehamzaNo ratings yet
- GRADES 1 To 12 Daily Lesson Log: Weekly TestDocument6 pagesGRADES 1 To 12 Daily Lesson Log: Weekly TestPaul Bryan BronNo ratings yet
- Some Important Axioms of Basic GeometryDocument6 pagesSome Important Axioms of Basic GeometryAnup SaravanNo ratings yet
- Eclecticism in Minor ArchitectureDocument12 pagesEclecticism in Minor ArchitectureAbirami SathyaNo ratings yet
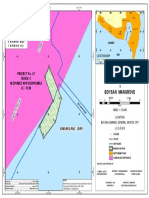
- 37 Boysan - Bawing - Mangrove PDFDocument1 page37 Boysan - Bawing - Mangrove PDFCirilo Jr. LagnasonNo ratings yet