Download as pdf or txt
You might also like
- CT660 2012Document58 pagesCT660 2012Eduardo Alvarez100% (2)
- Astronautics: Corporation of AmericaDocument2 pagesAstronautics: Corporation of Americajoel alvaradoNo ratings yet
- Manual e Stufa Sara Auto Constructor EsDocument15 pagesManual e Stufa Sara Auto Constructor EsDamián Follino80% (5)
- Arthroscopic Powered InstrumentsDocument7 pagesArthroscopic Powered Instrumentszoom_999No ratings yet
- Three-Dimensional Morphology of The Masseter Muscle in Patients With Mandibular PrognathismDocument7 pagesThree-Dimensional Morphology of The Masseter Muscle in Patients With Mandibular PrognathismChavdarNo ratings yet
- The Umbilical Benz Incision For Reduced Port Surgery in Pediatric PatientsDocument6 pagesThe Umbilical Benz Incision For Reduced Port Surgery in Pediatric PatientsMarcelo BarberoNo ratings yet
- (Mitsuo Kusano, Norihiro Kokudo, Masakazu Toi, Mas (B-Ok - Xyz)Document453 pages(Mitsuo Kusano, Norihiro Kokudo, Masakazu Toi, Mas (B-Ok - Xyz)sanketNo ratings yet
- Piezoelectric Surgery A Predictable and Painless Approach in PeriodonticsDocument7 pagesPiezoelectric Surgery A Predictable and Painless Approach in PeriodonticsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- JOrthodontSci 2012 1 3 69 103865 PDFDocument10 pagesJOrthodontSci 2012 1 3 69 103865 PDFDenis KimNo ratings yet
- Socket ShieldDocument7 pagesSocket ShieldsnkidNo ratings yet
- Iort 89 1453714Document7 pagesIort 89 1453714KARANAM SANTOSHNo ratings yet
- Augmented Virtual and Mixed Reality in Spinal SurgDocument12 pagesAugmented Virtual and Mixed Reality in Spinal SurgSupriya PoudelNo ratings yet
- 2007 JomiDocument7 pages2007 JomiCássio BernardNo ratings yet
- Immediate Denture Fabrication: A Clinical Report: January 2013Document6 pagesImmediate Denture Fabrication: A Clinical Report: January 2013kapilqqqNo ratings yet
- Chicken Wing ModelDocument4 pagesChicken Wing ModelIevgenii IarmoliukNo ratings yet
- Art, Artistry, and Plastic Surgery - SepehripourDocument3 pagesArt, Artistry, and Plastic Surgery - Sepehripournflores1985No ratings yet
- Comparative Evaluation of Vertical and Lateral Gingival Displacement Produced by MecDocument8 pagesComparative Evaluation of Vertical and Lateral Gingival Displacement Produced by MecInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Patient-Specific Bone ImplantsDocument11 pagesPatient-Specific Bone ImplantssreeshpsNo ratings yet
- Insertion Torque and Periotest Values Are Important Factors Predicting Outcome After Orthodontic Miniscrew PlacementDocument6 pagesInsertion Torque and Periotest Values Are Important Factors Predicting Outcome After Orthodontic Miniscrew PlacementGiovanni Eduardo Medina MartinezNo ratings yet
- 2023 Stereotactic Body Radiation TherapyDocument320 pages2023 Stereotactic Body Radiation TherapyOzan Cem GÜLERNo ratings yet
- Distance Between Implants Has A Potential Impact oDocument6 pagesDistance Between Implants Has A Potential Impact odehaaNo ratings yet
- Ejoi 2021 02 s0157Document24 pagesEjoi 2021 02 s0157Daniel AtiehNo ratings yet
- Remote Surgery Using A Neuroendovascular InterventDocument4 pagesRemote Surgery Using A Neuroendovascular InterventAbdulkareem 99No ratings yet
- Innovations in Endoscopic Ear SurgeryFrom EverandInnovations in Endoscopic Ear SurgerySeiji KakehataNo ratings yet
- A Bimodal Detection-Based Tremor Suppression System For Vascular Interventional Surgery RobotsDocument13 pagesA Bimodal Detection-Based Tremor Suppression System For Vascular Interventional Surgery RobotsAbdulkareem 99No ratings yet
- Sportsmedicineandphysfitness (Jurnal Sport)Document17 pagesSportsmedicineandphysfitness (Jurnal Sport)Fadhli Al FaruqNo ratings yet
- UMTIKPaper BarnesetalDocument16 pagesUMTIKPaper BarnesetalwilsonNo ratings yet
- Review On Development Status and Key Technologies of Surgical RobotsDocument6 pagesReview On Development Status and Key Technologies of Surgical RobotsAbderaouf BenyammiNo ratings yet
- Torque en Insercion y ExtraccionDocument10 pagesTorque en Insercion y ExtraccionGiovanni Eduardo Medina MartinezNo ratings yet
- Cosummary: Adaptive Fast-Forwarding For Surgical Videos by Detecting Collaborative Scenes Using Hand Regions and Gaze PositionsDocument12 pagesCosummary: Adaptive Fast-Forwarding For Surgical Videos by Detecting Collaborative Scenes Using Hand Regions and Gaze PositionsLucas HarimNo ratings yet
- Per Aspera Ad Astra Through Hardship To The StarsDocument3 pagesPer Aspera Ad Astra Through Hardship To The StarsQncheto TrakovaNo ratings yet
- Surgical RoboticsDocument9 pagesSurgical RoboticsShivangi SinhaNo ratings yet
- Saifinalthesis PDFDocument158 pagesSaifinalthesis PDFSai VenkatNo ratings yet
- Extremity and Eye-Lens Dosimetry: Issues, Recommendations, and ApproachesDocument2 pagesExtremity and Eye-Lens Dosimetry: Issues, Recommendations, and Approachesmdiaz_784526100% (1)
- Torque MinitornillosDocument9 pagesTorque MinitornillosGiovanni Eduardo Medina MartinezNo ratings yet
- 23 Nasa FujiharaDocument7 pages23 Nasa FujiharaVõ Văn Phúc ToànNo ratings yet
- Evaluation of Surgical Instruments With Rediofrequency Identification Tags in The Operationg RoomDocument6 pagesEvaluation of Surgical Instruments With Rediofrequency Identification Tags in The Operationg RoomMuhamad AimanNo ratings yet
- SURGERY Implant SICDocument32 pagesSURGERY Implant SICPhú VinhNo ratings yet
- Biomechanical Investigation of Human Femur by Reverse Engineering As A Robust Method and Applied SimplificationsDocument7 pagesBiomechanical Investigation of Human Femur by Reverse Engineering As A Robust Method and Applied Simplificationsimen mehriNo ratings yet
- Surgical TechnologyDocument28 pagesSurgical TechnologyJeyarajasekar TtrNo ratings yet
- Nice One HydrogelDocument10 pagesNice One HydrogelJohn Carlo CaparasNo ratings yet
- Clear Aligners: An Insight To BiomechanicsDocument12 pagesClear Aligners: An Insight To BiomechanicsIJAR JOURNALNo ratings yet
- Toward Robot-Assisted Hard Osteolytic Lesion Treatment Using A Continuum ManipulatorDocument5 pagesToward Robot-Assisted Hard Osteolytic Lesion Treatment Using A Continuum ManipulatorAli AlrwzaiqiNo ratings yet
- Atlas of Spectral Endoscopic ImagesDocument32 pagesAtlas of Spectral Endoscopic ImagesChargerNo ratings yet
- Interface Oral Health Science 2016Document273 pagesInterface Oral Health Science 2016alfonso lopez alquisirezNo ratings yet
- Advances in Radiographic Techniques Used in Dentistry: March 2015Document39 pagesAdvances in Radiographic Techniques Used in Dentistry: March 2015Mufidah NurulNo ratings yet
- Sujith Thesis Final 10-11-2016Document173 pagesSujith Thesis Final 10-11-2016ee19s051No ratings yet
- Brown Beige NewsletterDocument6 pagesBrown Beige Newsletterapi-538723495No ratings yet
- Determination of Representative Dimension ParametersDocument11 pagesDetermination of Representative Dimension ParametersMỹ Duyên NguyễnNo ratings yet
- Histopathological Image Analysis A ReviewDocument60 pagesHistopathological Image Analysis A ReviewAna Sofia SantiagoNo ratings yet
- Rigde Expansion Technique Using Universal Densah Bur Kit-A Clinical Case ReportDocument5 pagesRigde Expansion Technique Using Universal Densah Bur Kit-A Clinical Case ReportASJADI SHEIKHNo ratings yet
- Robotic Nurse Duties in The Urology Operative Room: 11 Years of ExperienceDocument8 pagesRobotic Nurse Duties in The Urology Operative Room: 11 Years of ExperienceLaura CursaruNo ratings yet
- Silicone FixationDocument8 pagesSilicone FixationTravis CreveCoeurNo ratings yet
- Diseccion AnatomicaDocument8 pagesDiseccion AnatomicacristianescNo ratings yet
- Direct vs. Indirect Sinus Lift Procedure: A Comparison: March 2012Document8 pagesDirect vs. Indirect Sinus Lift Procedure: A Comparison: March 2012Sidhartha KumarNo ratings yet
- Kjod 44 177 PDFDocument7 pagesKjod 44 177 PDFRebin AliNo ratings yet
- Soft Exoskeleton With Fully Actuated Thumb Movements For Grasping AssistanceDocument15 pagesSoft Exoskeleton With Fully Actuated Thumb Movements For Grasping AssistanceMaria SaragocaNo ratings yet
- Panduan Klinis SC Edited 18-7-2022 FULL1Document72 pagesPanduan Klinis SC Edited 18-7-2022 FULL1listayulNo ratings yet
- Champy LLLDocument25 pagesChampy LLLandi arfandiNo ratings yet
- Radiographic Stents and Surgical Stents in ImplantDocument6 pagesRadiographic Stents and Surgical Stents in Implantkavya ravuriNo ratings yet
- ShsjsDocument137 pagesShsjsAbhishek AroraNo ratings yet
- 5Document117 pages5mariam askarNo ratings yet
- 17thpublication IJCEInnovative 2ndname PDFDocument5 pages17thpublication IJCEInnovative 2ndname PDFVanditaNo ratings yet
- Cip and Designing of SystemDocument4 pagesCip and Designing of SystemMonty KushwahaNo ratings yet
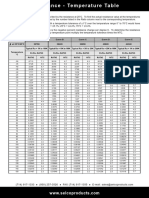
- NTC - Resistance - Temperature TableDocument2 pagesNTC - Resistance - Temperature TableСтефан Тасиќ0% (1)
- Solutions of Inverse Geodetic Problem in Navigational Applications PDFDocument5 pagesSolutions of Inverse Geodetic Problem in Navigational Applications PDFLacci123No ratings yet
- DBMS Answer Sheet 2020fallDocument7 pagesDBMS Answer Sheet 2020fallShariar Parvez TonmoyNo ratings yet
- AJAX & PHP Question BankDocument18 pagesAJAX & PHP Question Bankaryansuthar194No ratings yet
- Probability and Statistical Analysis: Chapter FiveDocument25 pagesProbability and Statistical Analysis: Chapter Fiveyusuf yuyuNo ratings yet
- Gypsum ProductsDocument53 pagesGypsum ProductsKiran KumarNo ratings yet
- Radiology SPOTTERS 1Document34 pagesRadiology SPOTTERS 1Sivakumar Sadasivam100% (1)
- Nama: Diphda Antaresada Nim: 201581294 Online 5 DPPL Sesi 10 UML Project UAS 1. Use CaseDocument2 pagesNama: Diphda Antaresada Nim: 201581294 Online 5 DPPL Sesi 10 UML Project UAS 1. Use CaseDiphda AntaresadaNo ratings yet
- Session 9808 - IMS PerfDocument45 pagesSession 9808 - IMS Perfemeka2012No ratings yet
- Ave Verum CorpusDocument21 pagesAve Verum Corpuslmax53100% (1)
- Hash Function Instruction CountDocument6 pagesHash Function Instruction Countapi-1752250No ratings yet
- Bassy Certificate 2021Document12 pagesBassy Certificate 2021AMUDI EMEKANo ratings yet
- NagiosDocument31 pagesNagiosdianNo ratings yet
- CH 05Document57 pagesCH 05Keyur MahantNo ratings yet
- Tubes PipesDocument19 pagesTubes Pipesmaria_bustelo_2No ratings yet
- Gold BugDocument5 pagesGold BugMarky MaypoNo ratings yet
- Large Data Set Lds-EdexcelDocument146 pagesLarge Data Set Lds-EdexcelhadzNo ratings yet
- 200 Series General Purpose Vector AC Drive: Operation ManualDocument82 pages200 Series General Purpose Vector AC Drive: Operation ManualsmartnaizllcNo ratings yet
- Limitations of MLDocument10 pagesLimitations of MLNavneet LalwaniNo ratings yet
- Flare Calc Sheet API RP 521Document11 pagesFlare Calc Sheet API RP 521PIDNo ratings yet
- HUAWEI VNS-L31C432B160 Software Upgrade GuidelineDocument9 pagesHUAWEI VNS-L31C432B160 Software Upgrade GuidelineAlessandroCarlàNo ratings yet
- 3D-Duct Design Using Variable Fidelity MethodDocument11 pages3D-Duct Design Using Variable Fidelity MethodPartha SurveNo ratings yet
- Micropolar Fluid Lubrication of Finite Rough Porous Journal Bearing With Squeezing EffectDocument28 pagesMicropolar Fluid Lubrication of Finite Rough Porous Journal Bearing With Squeezing EffectIJAR JOURNALNo ratings yet
- En Composer 8.1.3 Help BookDocument1,222 pagesEn Composer 8.1.3 Help BookAshar AkbarNo ratings yet
- D 6463 - 99 Rdy0njmDocument4 pagesD 6463 - 99 Rdy0njmMarceloNo ratings yet
- E196-06 (2012) Standard Practice For Gravity Load Testing of Floors and Low Slope RoofsDocument3 pagesE196-06 (2012) Standard Practice For Gravity Load Testing of Floors and Low Slope RoofsAlabbas FadhelNo ratings yet