Download as pdf or txt
You might also like
- Geriatric Consideration in NursingDocument31 pagesGeriatric Consideration in NursingBabita Dhruw100% (5)
- FP 351 F150FETX-FL150FETX YAMAHANIGERIA en BD-1Document1 pageFP 351 F150FETX-FL150FETX YAMAHANIGERIA en BD-1Farhad GhaffarNo ratings yet
- Arc Welding Solution: With Yaskawa MotomanDocument26 pagesArc Welding Solution: With Yaskawa MotomanMayank Jain0% (1)
- YK1200X 400 RCX340-4: Standard Type: Large TypeDocument1 pageYK1200X 400 RCX340-4: Standard Type: Large TypeJuan David Valderrama ArtunduagaNo ratings yet
- Yk 350 XGDocument2 pagesYk 350 XGjet.heNo ratings yet
- P DriverDocument8 pagesP DriverfoxNo ratings yet
- SC-350S/D, SC - 350S/D, SC - 600S/D: All-Axis Servo Driven Type Take-Out RobotDocument1 pageSC-350S/D, SC - 350S/D, SC - 600S/D: All-Axis Servo Driven Type Take-Out Robotbagas prakosoNo ratings yet
- sc70 enDocument1 pagesc70 enRick ChenNo ratings yet
- Long Z: User's ManualDocument60 pagesLong Z: User's Manualchinaaaa6No ratings yet
- EZ03 BrochureDocument2 pagesEZ03 BrochureXanti Zabala Da RosaNo ratings yet
- BRTN17WSS5PC Technical Specifications 10 VersionDocument1 pageBRTN17WSS5PC Technical Specifications 10 VersionHafid FisherholicNo ratings yet
- R7801e 5Document2 pagesR7801e 5ArifNo ratings yet
- BRTN24WSS5PC Technical Specifications 10 VersionDocument1 pageBRTN24WSS5PC Technical Specifications 10 VersionHafid FisherholicNo ratings yet
- Yk 250 XGDocument2 pagesYk 250 XGjet.heNo ratings yet
- Sany_crane-brochure_SCC400TB-EV_081951Document16 pagesSany_crane-brochure_SCC400TB-EV_081951Alex MazaNo ratings yet
- BRTN30WSS5FC Technical Specifications (10 Version)Document1 pageBRTN30WSS5FC Technical Specifications (10 Version)Hafid FisherholicNo ratings yet
- Scara SR 12ia Flyer enDocument2 pagesScara SR 12ia Flyer enJorge Israel Suárez AguilarNo ratings yet
- Auto K 400 / 600: Thyristorised Power Sources For MIG / MAG WeldingDocument2 pagesAuto K 400 / 600: Thyristorised Power Sources For MIG / MAG WeldingMohit TyagiNo ratings yet
- Sircover: From 125 To 3200 ADocument6 pagesSircover: From 125 To 3200 ARoland Gustavo Sejas GamboaNo ratings yet
- Linear Actuators JC35D: Data SheetDocument5 pagesLinear Actuators JC35D: Data SheetJULIAN TABARES RESTREPONo ratings yet
- Actuonix L16 DatasheetDocument4 pagesActuonix L16 Datasheetridha wahyu utariNo ratings yet
- LU_specDocument9 pagesLU_specntanh.sjNo ratings yet
- D4 Series: Miniature Snap-Action SwitchesDocument5 pagesD4 Series: Miniature Snap-Action SwitchesAnand sNo ratings yet
- Ltp-A: Linear Position TransducersDocument2 pagesLtp-A: Linear Position TransducersAbhay AbhyankarNo ratings yet
- Ip300 3100Document8 pagesIp300 3100sugianto barusNo ratings yet
- Variable Frequency Drives A700Document62 pagesVariable Frequency Drives A700sunhuynhNo ratings yet
- R 2000ic 100P Flyer ENDocument2 pagesR 2000ic 100P Flyer ENperop123No ratings yet
- Cobra 7250EXM Datasheet 8.28.14Document2 pagesCobra 7250EXM Datasheet 8.28.14FarmaceuticaNo ratings yet
- Bolting Systems Pe60 UsDocument6 pagesBolting Systems Pe60 UsEbrahim AhmariNo ratings yet
- 7 CL500Document4 pages7 CL500santhoshkumar.sNo ratings yet
- Accurax Linear Motor Axis: R88L-EA-AFDocument14 pagesAccurax Linear Motor Axis: R88L-EA-AFdiarjohn9979No ratings yet
- JCB Tracked Excavator JS130 L T.A.B.: Static DimensionsDocument6 pagesJCB Tracked Excavator JS130 L T.A.B.: Static DimensionsKovacs Zsolt-Istvan100% (1)
- M20200812-2 (ME-1055 With Siemens 828D PPU260)Document2 pagesM20200812-2 (ME-1055 With Siemens 828D PPU260)donny rebornNo ratings yet
- Panoramic P40.13EE, P40.17EE, P50.18EEDocument4 pagesPanoramic P40.13EE, P40.17EE, P50.18EEpopart72No ratings yet
- SI-E122 AcbDocument110 pagesSI-E122 AcbshantoNo ratings yet
- Ficha Tecnica Vatimetro Solis ACR10Document4 pagesFicha Tecnica Vatimetro Solis ACR10Sergio LopezNo ratings yet
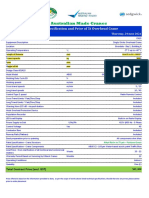
- Buy Australian Made Cranes: Technical Specification and Price of 5t Overhead CraneDocument3 pagesBuy Australian Made Cranes: Technical Specification and Price of 5t Overhead CraneQuang VoNo ratings yet
- Sanyuan Wire Rope Hoist All - 2020 2 12 en 1Document20 pagesSanyuan Wire Rope Hoist All - 2020 2 12 en 1cao van daiNo ratings yet
- Electric Spring Return Actuators: SeriesDocument1 pageElectric Spring Return Actuators: SeriesTAHIR MAHMOODNo ratings yet
- BG1000 Leaflet 20201221+ (UPDATED)Document2 pagesBG1000 Leaflet 20201221+ (UPDATED)KCC CivilNo ratings yet
- 1SCA105418R1001 Ot80f4cDocument3 pages1SCA105418R1001 Ot80f4cDenson Prima UtamaNo ratings yet
- RDS3 1Document10 pagesRDS3 1Reinaldo GonzálezNo ratings yet
- Citel Ds Mp200series U081902aDocument3 pagesCitel Ds Mp200series U081902aErnesto CanoNo ratings yet
- Material Handling OM BrochureDocument6 pagesMaterial Handling OM BrochureGiovaniAricettiNo ratings yet
- HPK MotorsDocument13 pagesHPK MotorsBrentildaNo ratings yet
- DS Servo Motor ACM604V60-01-2500 enDocument3 pagesDS Servo Motor ACM604V60-01-2500 enRafael Morais MachadoNo ratings yet
- Scara Robot: High Speed HandlingDocument2 pagesScara Robot: High Speed HandlingXanti Zabala Da RosaNo ratings yet
- Ts 400VII 520BDocument2 pagesTs 400VII 520Btou kaiNo ratings yet
- Variable Frequency DrivesDocument88 pagesVariable Frequency DrivesOziel García BarcelóNo ratings yet
- And Versatile: Strong, CompactDocument2 pagesAnd Versatile: Strong, Compactperop123No ratings yet
- RP0910Document7 pagesRP0910angelescuoNo ratings yet
- Vertical Axis Wind Turbine Power System Model: DS1500 Roduct SpecificationsDocument2 pagesVertical Axis Wind Turbine Power System Model: DS1500 Roduct SpecificationsRene Alexander Barrera CardenasNo ratings yet
- Electric Actuators For Valves & Dampers: Your Qualified Partner in Actuator TechnologyDocument6 pagesElectric Actuators For Valves & Dampers: Your Qualified Partner in Actuator TechnologyPROPOSALSNo ratings yet
- Cimr V7az Varispeed v7 InverteruDocument18 pagesCimr V7az Varispeed v7 InverteruGOOGLE DISKNo ratings yet
- LS Variador 2.2Document1 pageLS Variador 2.2Blanca NieveNo ratings yet
- Isolation Product Solution For Motor DriveDocument2 pagesIsolation Product Solution For Motor DriveIvana PrezimeNo ratings yet
- STC700C5单行本 中英文版20220727Document16 pagesSTC700C5单行本 中英文版20220727Kevin AzrialNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- Brochure F155Document4 pagesBrochure F155DaniNo ratings yet
- Beml MachineDocument1 pageBeml MachineKARTHICKRAJ KANDASAMYNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 3HAC037635-002-3hac037635-002 RV 70F-125.8Document4 pages3HAC037635-002-3hac037635-002 RV 70F-125.8jet.heNo ratings yet
- Yk 350 XGDocument2 pagesYk 350 XGjet.heNo ratings yet
- 2018 1117 e Series Functional SafetyDocument4 pages2018 1117 e Series Functional Safetyjet.heNo ratings yet
- Yk 250 XGDocument2 pagesYk 250 XGjet.heNo ratings yet
- HUAWEI - SUN2000-20-40KTL-M3-UserManual GCADocument102 pagesHUAWEI - SUN2000-20-40KTL-M3-UserManual GCAReardon MetalsNo ratings yet
- Kohlberg's Stages of Moral DevelopmentDocument14 pagesKohlberg's Stages of Moral DevelopmentMarvelyn De StoTomas IgnacioNo ratings yet
- Gábor Vékony - Dacians, Romans, RumaniansDocument254 pagesGábor Vékony - Dacians, Romans, RumaniansTinuszka67% (3)
- Drama Bahasa InggrisDocument24 pagesDrama Bahasa InggrisCahyo Yang bahagiaNo ratings yet
- Stable Fixed Points of Card Trick FunctionsDocument10 pagesStable Fixed Points of Card Trick FunctionsDerekNo ratings yet
- Thermal Energy Storage System Using Phase Change Materials - Constant Heat SourceDocument8 pagesThermal Energy Storage System Using Phase Change Materials - Constant Heat SourceLue niNo ratings yet
- Development of TOSRA (Test of Science Related Attitudes) Instrument For Science Related Attitude Studies in Sindh ProvinceDocument16 pagesDevelopment of TOSRA (Test of Science Related Attitudes) Instrument For Science Related Attitude Studies in Sindh ProvinceYhann Buyan GeverolaNo ratings yet
- Department of Mechanical Engineering: Final Year Mini Project PresentationDocument22 pagesDepartment of Mechanical Engineering: Final Year Mini Project PresentationNaresh DamaNo ratings yet
- Name:-Muhammad Shabbir Roll No. 508194950Document11 pagesName:-Muhammad Shabbir Roll No. 508194950Muhammad ShabbirNo ratings yet
- ContinueDocument3 pagesContinueJúÑi ØrNo ratings yet
- Semantically Partitioned Object Sap BW 7.3Document23 pagesSemantically Partitioned Object Sap BW 7.3smiks50% (2)
- CEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)Document18 pagesCEA Farms Logistics USA Slide Deck (2023!10!31 10-38-56 UTC)SiyabongaNo ratings yet
- Infosys-Broadcom E2E Continuous Testing Platform Business Process Automation SolutionDocument16 pagesInfosys-Broadcom E2E Continuous Testing Platform Business Process Automation Solutioncharu.hitechrobot2889No ratings yet
- CGF FPC Palm Oil RoadmapDocument31 pagesCGF FPC Palm Oil RoadmapnamasayanazlyaNo ratings yet
- IIA IPPF PG - Quality Assurance and Improvement Program March 2012Document29 pagesIIA IPPF PG - Quality Assurance and Improvement Program March 2012Denilson MadaugyNo ratings yet
- Ovarian Cancer ThesisDocument8 pagesOvarian Cancer ThesisDon Dooley100% (1)
- Biochemistry FinalDocument12 pagesBiochemistry FinalAhmed Hamarneh100% (1)
- Dialogic DSI Signaling Servers: SIU Mode User ManualDocument304 pagesDialogic DSI Signaling Servers: SIU Mode User ManualAdiansyah Rama67% (3)
- Consumer Protection Act - SeminarDocument16 pagesConsumer Protection Act - SeminarAbdul KhadeerNo ratings yet
- Title: Relationship Between PH and Chemiluminescence of Luminol Author: Rolando Efraín Hernández RamírezDocument2 pagesTitle: Relationship Between PH and Chemiluminescence of Luminol Author: Rolando Efraín Hernández RamírezEfraínNo ratings yet
- Eastron Electronic Co., LTDDocument2 pagesEastron Electronic Co., LTDasd qweNo ratings yet
- Act 1 Almeyda JTLDocument2 pagesAct 1 Almeyda JTLAltairNo ratings yet
- Sustainable Consumption Production in India - AnalysisDocument8 pagesSustainable Consumption Production in India - Analysisanon_794541559No ratings yet
- A 182Document20 pagesA 182Thomas100% (1)
- 1 6 Assignment Classifying Polygons 1Document6 pages1 6 Assignment Classifying Polygons 1TeaNo ratings yet
- Understanding Sars-Cov-2-Induced Systemic Amyloidosis: BiorxivDocument4 pagesUnderstanding Sars-Cov-2-Induced Systemic Amyloidosis: BiorxivAntonisNo ratings yet
- 4411 Studio MonitorDocument4 pages4411 Studio MonitorabraxastributetosantanaNo ratings yet
- 3) 2013 March - The Thing About Ms. Hollis MaynellDocument23 pages3) 2013 March - The Thing About Ms. Hollis MaynellShy TolentinoNo ratings yet
- The Man With The Twisted Lip: Arthur Conan DoyleDocument13 pagesThe Man With The Twisted Lip: Arthur Conan DoyleSundara MurthyNo ratings yet