Professional Documents
Culture Documents
Yk 350 XG
Yk 350 XG
Uploaded by
jet.heOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Yk 350 XG
Yk 350 XG
Uploaded by
jet.heCopyright:
Available Formats
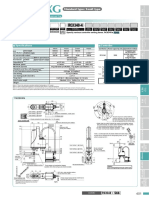
YK350XG
Articulated robots
Standard type: Small type
YA
Arm length 350mm Maximum payload 5kg
Linear conveyor
LCM100
Ordering method
modules
YK350XG 150 RCX340-4
Model Z axis stroke Tool flange Hollow shaft Cable Controller / Safety Option A Option B Option C Option D Option E Absolute
Motor-less single
Robonity TRANSERVO
Number of controllable axes standard (OP.A) (OP.B) (OP.C) (OP.D) (OP.E) battery
axis actuator
150: 150mm No entry: None No entry: None 3L: 3.5m
F: With tool flange S: With hollow shaft 5L: 5m
10L: 10m Specify various controller setting items. RCX340 P.566
single-axis robots
Compact
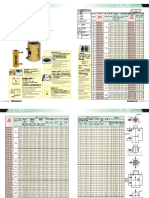
Specifications Controller
X-axis Y-axis Z-axis R-axis Controller Power capacity (VA) Operation method
Axis Arm length 200 mm 150 mm 150 mm - Programming /
Single-axis robots
specifications Rotation angle +/-140 ° +/-144 ° - +/-360 ° I/O point trace /
FLIP-X
Remote command /
AC servo motor output 200 W 150 W 50 W 100 W RCX340 1000
Operation
Deceleration Transmission Motor to speed reducer Direct-coupled using RS-232C
mechanism method Speed reducer to output Direct-coupled communication
Repeatability Note 1 +/-0.01 mm +/-0.01 mm +/-0.004 °
single-axis robots
PHASER
Maximum speed 5.6 m/sec 1.1 m/sec 1020 °/sec
Linear motor
Maximum payload 5 kg (Standard specification), 4 kg (Option specifications Note 4) Note. The movement range can be limited by changing the positions
of X and Y axis mechanical stoppers. (The movement range is
Standard cycle time: with 2kg payload Note 2 0.44 sec set to the maximum at the time of shipment.)
R-axis tolerable moment of inertia Note 3 0.05 kgm2 (0.5 kgfcms2) See our robot manuals (installation manuals) for detailed
information.
User wiring 0.2 sq × 10 wires Note. To set the standard coordinates with high accuracy, use a
User tubing (Outer diameter) ϕ4×3 standard coordinate setting jig (option). Refer to the user’s
Cartesian
manual (installation manual) for more details.
XY-X
robots
Travel limit 1.Soft limit 2.Mechanical stopper (X,Y,Z axis)
Our robot manuals (installation manuals) can be
Robot cable length Standard: 3.5 m Option: 5 m, 10 m downloaded from our website at the address below:
Weight 19 kg https://global.yamaha-motor.com/business/robot/
Note 1. This is the value at a constant ambient temperature. (X,Y axes)
Note 2. When reciprocating 300mm in horizontal and 25mm in vertical directions.
Note 3. The acceleration coefficient is set automatically in accordance with the tip weight and R-axis moment of inertia settings.
YK-X
SCARA
robots
Note 4. Maximum payload of option specifications (with tool flange attached or with user wiring and tubing routed through spline shaft) is 4kg.
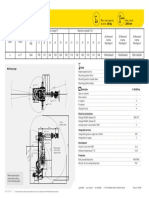
YK350XG
Pick & place
YP-X
robots
142
93
144°
144°
60
104
140°
R1
140
90
140°
18
60
CLEAN
R350
116°
User tubing 1 (ϕ4 black) 30 62
116°
303
4-ϕ9
User tubing 2 (ϕ4 red) 50 88 M8 bolt for installation, 4 bolts used
User tubing 3 (ϕ4 blue)
R190
R150
138 (Base size) 148 If the robot enters the inside of the corner of
CONTROLLER INFORMATION
R190 and dimension 148, the Z-axis upper
Cross section B-B D-sub connector for user wiring (No. 1 to 10 usable) end stopper may be in contact with the base
129 or the arm may be in contact with the machine
56 150 200 Maximum 330 during arm rotation harness. So, do not perform such motion.
• Note that the robot cannot be used at a position where
Machine harness 620 the base flange or robot cable interferes with the spline
661
Maximum 660 in the working envelope shown above.
613 during arm rotation • X-axis mechanical stopper position : 142°
r ϕ11
• Y-axis mechanical stopper position : 146°
te
diamew
Hollo
B B 4-M3 × 0.5 through-hole (No phase relation to R-axis origin.)
7.8
468 As this hole is intended for the wiring/tubing clamp, do not
428 attach a large load to it.
↓F
7.8
47
Extra small
User tubing 1 (ϕ4 black) ϕ27 7.8 7.8
Orbit /
type
42 57 780.5 View of F
5
283
150
User tubing 2 (ϕ4 red)
264 D-sub connector
235 246
222 for user wiring
230
Small type
202 User tubing 3 (ϕ4 blue) (No. 1 to 10 usable)
187
30 12
183 174
A A 167
138.5 +/-2
0
ϕ16h7-0.018
4
User tool 95
installation ϕ35 Z-axis upper end mechanical 79
Large type inverse type
150
range stopper position 4mm rise 61 138.5 +/-2
45
86
150
during Z-axis return-to-origin 12
0 0 0 0
28 26
11.5
Z-axis lower end M4 ground terminal
Width across flat 15
11.5
4
mechanical stopper position
Option:
Wall mount / & drip-proof
1
54
ϕ1
50 70 20 User wiring/tubing through spline type
R27 (Min. cable bending radius)
ter
me
Do not move the cable.
dia
10 10
w
39 39
llo
Ho
Keep enough space for the maintenance
work at the rear of the base.
Dust-proof
Cross section A-A Tapped hole for user wiring 6-M3 × 0.5 Depth 6 4-ϕ9
type
The weight of the tool attached here should be added to the tip mass.
Controller RCX340 u 566 403
YK350XG
Articulated robots
YA
Linear conveyor
LCM100
modules
Motor-less single
Robonity TRANSERVO
axis actuator
single-axis robots
Compact
Single-axis robots
FLIP-X
single-axis robots
PHASER
Linear motor
Cartesian
XY-X
robots
YK-X
SCARA
robots
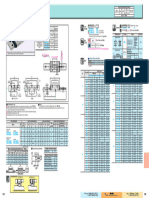
YK350XG Tool flange mount type
Pick & place
YP-X
robots
142
93
144°
144°
60
104
140°
R11
140°
140
90
8
60
CLEAN
116
0
30 62 R35
116°
303
4-ϕ9
°
50 88 M8 bolt for installation, 4 bolts used
0
R150
138 (Base size)
R19
164 If the robot enters the inside of the corner
of R190 and dimension 164, the tool flange
CONTROLLER INFORMATION
Machine harness may be in contact with the base or the arm
may be in contact with the machine
harness. So, do not perform such motion.
• Note that the robot cannot be used at a position where
the base flange or robot cable interferes with the tool
flange in the working envelope shown above.
• X-axis mechanical stopper position : 142°
1
ter ϕ1
• Y-axis mechanical stopper position : 146°
diamew
Hollo
User tubing 1 (ϕ4 black) 4-M3 × 0.5 through-hole (No phase relation to R-axis origin.)
7.8
As this hole is intended for the wiring/tubing clamp, do not
User tubing 2 (ϕ4 red) attach a large load to it.
D-sub connector
7.8
for user wiring
User tubing 3 (ϕ4 blue) (No. 1 to 10 usable) 7.8 7.8
Extra small
181 View of F
Orbit /
↓F
type
149 D
134.5+/-2 ϕ27
95 780.5
79
5
150
61
150
45
86
Small type
12
0 0
M4 ground terminal 28 26
15.5
Holl
R27 (Min. cable bending radius)
ow
50 70 20 54
Do not move the cable.
dia
Large type inverse type
181
m
22
ete
4-ϕ4.5 through-hole
.6
Keep enough space ϕ 35 149 D
r
10 10
39 39
ϕ11
for the maintenance 134.5 +/-2
150
work at the rear of
90°
the base. 0
22
15.5
6 .
4
Tapped hole for user wiring 6-M3 × 0.5 Depth 6
22
.
6
Wall mount / & drip-proof
6+
4-ϕ9 Option:
22
The weight of the tool attached here should
/-0
2
be added to the tip mass. ↑E User wiring/tubing through spline type
.0
0
ϕ30 h7-0.021
2
22 .02
ϕ 55 ϕ4 H7 0
+0.012
/-0
.6
7+
through-hole
Detailed drawing D View of E
Dust-proof
type
404 Controller RCX340 u 566
You might also like
- Wittmann R9 Robot User ManualDocument235 pagesWittmann R9 Robot User ManualLuis Martin80% (5)
- Toyota 8FBN PDFDocument7 pagesToyota 8FBN PDFweda utama100% (1)
- Arc Welding Solution: With Yaskawa MotomanDocument26 pagesArc Welding Solution: With Yaskawa MotomanMayank Jain0% (1)
- Annovi Reverberi XTV-2.1 Operating & Parts ManualDocument18 pagesAnnovi Reverberi XTV-2.1 Operating & Parts Manualinscribe100% (1)
- Escorts F15 Pick and Carry Crane PDFDocument2 pagesEscorts F15 Pick and Carry Crane PDFVenugopal Sri50% (2)
- Yk 250 XGDocument2 pagesYk 250 XGjet.heNo ratings yet
- Yk 400 XGDocument2 pagesYk 400 XGjet.heNo ratings yet
- YK1200X 400 RCX340-4: Standard Type: Large TypeDocument1 pageYK1200X 400 RCX340-4: Standard Type: Large TypeJuan David Valderrama ArtunduagaNo ratings yet
- Ordering Method: Specifications Allowable Overhang Static Loading MomentDocument1 pageOrdering Method: Specifications Allowable Overhang Static Loading MomentCentro turistico Los rosalesNo ratings yet
- Datasheet CR35iADocument1 pageDatasheet CR35iAsantiagoNo ratings yet
- 1000481-HSGP-5010-00-30-009 - H 1Document1 page1000481-HSGP-5010-00-30-009 - H 1hasan.mohamed2305No ratings yet
- SC-350S/D, SC - 350S/D, SC - 600S/D: All-Axis Servo Driven Type Take-Out RobotDocument1 pageSC-350S/D, SC - 350S/D, SC - 600S/D: All-Axis Servo Driven Type Take-Out Robotbagas prakosoNo ratings yet
- M-900 Robot Working Range: 330 KG 3203 MMDocument1 pageM-900 Robot Working Range: 330 KG 3203 MMjosjcrsNo ratings yet
- Emcoder Incremetal Das Serras Extrusoras E50-series-INSDocument1 pageEmcoder Incremetal Das Serras Extrusoras E50-series-INSEle isNo ratings yet
- Datasheet P-50iB-10LDocument1 pageDatasheet P-50iB-10LGabyReyesValdezNo ratings yet
- CR-35 Robot Working Range: 35 KG 1813 MMDocument1 pageCR-35 Robot Working Range: 35 KG 1813 MMGuilhermeNo ratings yet
- Datasheet M 1ia 05ADocument1 pageDatasheet M 1ia 05AHugo SalazarNo ratings yet
- Datasheet LRMate-200iD-7LCDocument1 pageDatasheet LRMate-200iD-7LCPremium WzorceNo ratings yet
- Long Z: User's ManualDocument60 pagesLong Z: User's Manualchinaaaa6No ratings yet
- sc70 enDocument1 pagesc70 enRick ChenNo ratings yet
- Heli Doc-20230117-Wa0001.Document1 pageHeli Doc-20230117-Wa0001.ATILLANo ratings yet
- Scara Robot: High Speed HandlingDocument2 pagesScara Robot: High Speed HandlingXanti Zabala Da RosaNo ratings yet
- ATS EngDocument1 pageATS EngOctavianus LinNo ratings yet
- Autonics E30s ManualDocument1 pageAutonics E30s ManualAndrez BermudezNo ratings yet
- Datasheet-Cr7ia L EnglishDocument1 pageDatasheet-Cr7ia L EnglishNgộ Không TônNo ratings yet
- Datasheet M 3ia 12HDocument1 pageDatasheet M 3ia 12H63 MGNo ratings yet
- Manual Chain Hoist Hand Pallet Truck Electric Chain Hoist (SSDHL - Model)Document2 pagesManual Chain Hoist Hand Pallet Truck Electric Chain Hoist (SSDHL - Model)Muhammed ShamseerNo ratings yet
- Datasheet M-710iC-45MDocument1 pageDatasheet M-710iC-45MEdgar Ivan BorbollaNo ratings yet
- Datasheet LRMate-200iD-4S - KUKADocument1 pageDatasheet LRMate-200iD-4S - KUKAJOSE MANUELNo ratings yet
- Datasheet M-1iA-05SDocument1 pageDatasheet M-1iA-05Sketan rsNo ratings yet
- M900iB 400LDocument1 pageM900iB 400LLeonardo AlexNo ratings yet
- Ec140b 09Document6 pagesEc140b 09Fadli HernandoNo ratings yet
- Datasheet Cr4ia enDocument1 pageDatasheet Cr4ia enMohit JaniNo ratings yet
- I107e r88m-g G-Series Servo Motors Datasheet enDocument10 pagesI107e r88m-g G-Series Servo Motors Datasheet ennguyenquocNo ratings yet
- MM 35 38CLRGDocument2 pagesMM 35 38CLRGHarvey Ian Pagatpatan AquinoNo ratings yet
- M-900 Robot Working Range: 360 KG 2655 MMDocument1 pageM-900 Robot Working Range: 360 KG 2655 MMKAKAKNo ratings yet
- Datasheet M 900ib 360Document1 pageDatasheet M 900ib 360ariyanto prasetioNo ratings yet
- FN1016 2SD2390Document1 pageFN1016 2SD2390jcarlos1960No ratings yet
- ZF As Tronic Schematic - EDocument2 pagesZF As Tronic Schematic - EBienvenu Massouangui50% (2)
- E40 Series INSDocument1 pageE40 Series INSSrinivas ElecNo ratings yet
- Sunstar KM-2300Document2 pagesSunstar KM-2300jairo rodriguez100% (1)
- Miniature Linear Guides: - Wide RailsDocument1 pageMiniature Linear Guides: - Wide Railsphatdang1996No ratings yet
- R7801e 5Document2 pagesR7801e 5ArifNo ratings yet
- EZ03 BrochureDocument2 pagesEZ03 BrochureXanti Zabala Da RosaNo ratings yet
- Escorts F15 Pick and Carry Cranes PDFDocument2 pagesEscorts F15 Pick and Carry Cranes PDFVenugopal SriNo ratings yet
- Escorts F15 Pick and Carry Crane PDFDocument2 pagesEscorts F15 Pick and Carry Crane PDFVenugopal SriNo ratings yet
- And Versatile: Strong, CompactDocument2 pagesAnd Versatile: Strong, Compactperop123No ratings yet
- SLG-250/80 - HL: Steel Plate Screw RubberDocument4 pagesSLG-250/80 - HL: Steel Plate Screw RubberJosue GonzalezNo ratings yet
- Silent Zero Piler - Scz-Eco600sDocument1 pageSilent Zero Piler - Scz-Eco600sPHÁT NGUYỄN THẾNo ratings yet
- E40S/E40H/E40HB/E80H SERIES: Rotary Encoder (Incremental Type)Document1 pageE40S/E40H/E40HB/E80H SERIES: Rotary Encoder (Incremental Type)Rubens RosaNo ratings yet
- Datasheet R 2000ic 165FDocument1 pageDatasheet R 2000ic 165FSalvador BarrónNo ratings yet
- 16 LS 600h L / LS 600h (Before Nov. 2009 Production) (Cont. Next Page)Document3 pages16 LS 600h L / LS 600h (Before Nov. 2009 Production) (Cont. Next Page)Waleed AlshgaaaNo ratings yet
- LLW R01 2017KW GBDocument28 pagesLLW R01 2017KW GBkatagi74No ratings yet
- Interactive Hydraulic Schematic 740AJ, 800A, 800AJ: 1. Select Function Arrow On Sheet A To Activate Hydraulic CircuitDocument4 pagesInteractive Hydraulic Schematic 740AJ, 800A, 800AJ: 1. Select Function Arrow On Sheet A To Activate Hydraulic CircuitRafael MeloNo ratings yet
- DS4510 5010Document2 pagesDS4510 5010Andie Hart100% (1)
- Datasheet LRMate-200iD-7WPDocument1 pageDatasheet LRMate-200iD-7WPperop123No ratings yet
- Datasheet N 813 01-2019 WebDocument6 pagesDatasheet N 813 01-2019 WebjyNo ratings yet
- When Technology AND Humanity Cross: Claudine Tul-IdDocument48 pagesWhen Technology AND Humanity Cross: Claudine Tul-IdElvin Villa100% (1)
- Local Media5476555320402902187Document14 pagesLocal Media5476555320402902187Aina HaravataNo ratings yet
- Irb 6620lxDocument2 pagesIrb 6620lxAlexandru RaduNo ratings yet
- Application of Robotics in Mining IndustryDocument5 pagesApplication of Robotics in Mining IndustryalfavectorNo ratings yet
- Design of Bore Well Rescue System Using Morphological Chart: December 2016Document6 pagesDesign of Bore Well Rescue System Using Morphological Chart: December 2016MakeshNo ratings yet
- Smart Luggage SystemDocument8 pagesSmart Luggage SystemIJRASETPublicationsNo ratings yet
- 890 A Bad RobotDocument10 pages890 A Bad Robotapi-291898450No ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Bijay KumarNo ratings yet
- How It Works - Book of Robots 2nd EditionDocument148 pagesHow It Works - Book of Robots 2nd EditionFan Charles100% (1)
- Mechatronics: Worldskills Occupational StandardsDocument8 pagesMechatronics: Worldskills Occupational Standardsyoussif IbrahimNo ratings yet
- Smartphone Operated Multifunctional Farming VehicleDocument6 pagesSmartphone Operated Multifunctional Farming VehicleVIVA-TECH IJRINo ratings yet
- Upper-Iintermediate 03 Written TestDocument6 pagesUpper-Iintermediate 03 Written TestFahima LayoulNo ratings yet
- SWS Free Chapter Darren BartleyDocument14 pagesSWS Free Chapter Darren BartleyDisney PattersonNo ratings yet
- Robotics: Past, Present & Future in India: H.S. Gill P. M. Menghal Vaibhaw Kala Archana SinghDocument7 pagesRobotics: Past, Present & Future in India: H.S. Gill P. M. Menghal Vaibhaw Kala Archana SinghNaveenSharmaNo ratings yet
- Finalized Report Lab 1Document23 pagesFinalized Report Lab 1hanifNo ratings yet
- Popular Mechanics 2010-04Document139 pagesPopular Mechanics 2010-04BookshebooksNo ratings yet
- Iiot ReportDocument18 pagesIiot ReportAnkita PradhanNo ratings yet
- En 2. Andor Machines For Bottling and Packaging IndustriesDocument40 pagesEn 2. Andor Machines For Bottling and Packaging IndustriesAshraf AbdualkareemNo ratings yet
- Ger Maas and Frans Van GasselDocument10 pagesGer Maas and Frans Van GasselvibishnanNo ratings yet
- Experimental Investigation Into Influence of Negative Attitudes Toward Robots On Human-Robot InteractionDocument13 pagesExperimental Investigation Into Influence of Negative Attitudes Toward Robots On Human-Robot InteractionBenjamin MeguiraNo ratings yet
- Recent Building TechnologyDocument9 pagesRecent Building TechnologyPeaceNo ratings yet
- Learning Task Essay Writing (Picture Analysis)Document2 pagesLearning Task Essay Writing (Picture Analysis)BSIT 1A Yancy CaliganNo ratings yet
- Unit Ix: TOPIC: Artificial Intelligence GRAMMAR: Modal Verbs/past Perfect/past ContinuousDocument43 pagesUnit Ix: TOPIC: Artificial Intelligence GRAMMAR: Modal Verbs/past Perfect/past ContinuousAida ShalaevaNo ratings yet
- Design and Implementation of A Low Cost 3D Printed Humanoid Robotic PlatformDocument6 pagesDesign and Implementation of A Low Cost 3D Printed Humanoid Robotic PlatformPranav KompallyNo ratings yet
- Car Progression SystemsDocument12 pagesCar Progression SystemsEduardo LopesNo ratings yet
- RoboticsDocument43 pagesRoboticsChristian MendezNo ratings yet
- Transformation From 5G For Verticals Towards A 6GDocument6 pagesTransformation From 5G For Verticals Towards A 6GShraddha ChopraNo ratings yet
- R3 - IPlant The Greenhouse RobotDocument6 pagesR3 - IPlant The Greenhouse RobotSajani N. BannekaNo ratings yet
- Fanuc R-2000iA Series PDFDocument4 pagesFanuc R-2000iA Series PDFAntonio RodriguezNo ratings yet