Download as doc, pdf, or txt
You might also like
- Manual EDX 700 ShimadzuDocument39 pagesManual EDX 700 Shimadzunaldo22100% (1)
- Measuring InstrumentDocument86 pagesMeasuring InstrumenteddoNo ratings yet
- Linear and Rotational Displacement MeasurementDocument39 pagesLinear and Rotational Displacement MeasurementAbhimanyu BhagatNo ratings yet
- Density of A Glass BlockDocument4 pagesDensity of A Glass BlockMichael Timson0% (1)
- Measuring Instrument (BEE)Document11 pagesMeasuring Instrument (BEE)Omnath DixitNo ratings yet
- Electrical Measurements & Instrumentation NotesDocument86 pagesElectrical Measurements & Instrumentation Notesthirupathi.eeegnitNo ratings yet
- Material - CompleteDocument84 pagesMaterial - CompleteApoorvNo ratings yet
- Iare Emei Lecture NotesDocument132 pagesIare Emei Lecture NotesSowmyaNo ratings yet
- Electrical Measurements & InstrumentationDocument86 pagesElectrical Measurements & InstrumentationDulecha Adane DulechaNo ratings yet
- Lecture 1423813026Document53 pagesLecture 1423813026BenNo ratings yet
- Unit 1Document47 pagesUnit 1dhub324No ratings yet
- Electrical Measuring InstrumentsDocument16 pagesElectrical Measuring InstrumentsKuldeep SinghNo ratings yet
- Induction Type Indicating InstrumentsDocument21 pagesInduction Type Indicating InstrumentsMonty KushwahaNo ratings yet
- Essential Components of Indicating InstrumentsDocument6 pagesEssential Components of Indicating InstrumentsHina AsifNo ratings yet
- AnalogDocument37 pagesAnalogchiin anthonyNo ratings yet
- Unit 4 Bee NotesDocument47 pagesUnit 4 Bee NotesSagar VatsNo ratings yet
- Measuring InstrumentsDocument40 pagesMeasuring InstrumentsDndjsjwjsjNo ratings yet
- Additional Notes On Analog InstrumentsDocument7 pagesAdditional Notes On Analog InstrumentsRosalinda RamosNo ratings yet
- Measuring Instruments: By: Nafees Ahmed, Asstt, Prof, EE Deptt, DIT, DehradunDocument39 pagesMeasuring Instruments: By: Nafees Ahmed, Asstt, Prof, EE Deptt, DIT, DehradunSarthak Singh ChandelNo ratings yet
- Electrical Principles 2 (CCEET 2)Document25 pagesElectrical Principles 2 (CCEET 2)Bernard MunyithyaNo ratings yet
- Alat Ukur AnalogDocument12 pagesAlat Ukur Analogmuhammad zidan abdillahNo ratings yet
- Resistive Load Cells Work On The Principle of Piezo-Resistivity. When ADocument7 pagesResistive Load Cells Work On The Principle of Piezo-Resistivity. When AJoel ChittiproluNo ratings yet
- Deflecting Torque (T) or Deflecting ForceDocument2 pagesDeflecting Torque (T) or Deflecting ForceSiddhartha SahaNo ratings yet
- Absolute Instruments: EI8351 - Electrical Measurements Class NotesDocument26 pagesAbsolute Instruments: EI8351 - Electrical Measurements Class NotesJebas ManovaNo ratings yet
- Unit 2 Electrical InstrumentDocument45 pagesUnit 2 Electrical InstrumentBoopathy C P100% (1)
- Instruments NotesDocument116 pagesInstruments Notesprithvih40% (1)
- Instruments NotesDocument116 pagesInstruments Notesprithvih4No ratings yet
- Analog Measuring Instruments: ObjectivesDocument17 pagesAnalog Measuring Instruments: ObjectivesMani MalNo ratings yet
- Topic 2-1f37518Document31 pagesTopic 2-1f37518norzamiraNo ratings yet
- Unit 3.1 PDFDocument8 pagesUnit 3.1 PDFRahul KumarNo ratings yet
- Unit 1Document45 pagesUnit 1C.HarshithaNo ratings yet
- 302 4.measurements PDFDocument23 pages302 4.measurements PDFSaicharan NagunooriNo ratings yet
- Measuring InstrumentsDocument4 pagesMeasuring InstrumentsJerry IsaacNo ratings yet
- Design and Implementation of Ball and Beam System Using PID ControllerDocument9 pagesDesign and Implementation of Ball and Beam System Using PID ControllerDeda MrazNo ratings yet
- Basic Principle of Mechanical Torsion MeterDocument4 pagesBasic Principle of Mechanical Torsion MeterKranthi KumarNo ratings yet
- MODULE 8: Measurement of Vibrations (I) Seismic Transducers, (Ii) LVDT Accelerometers, (Iii) Piezo-Electric AccelerometersDocument4 pagesMODULE 8: Measurement of Vibrations (I) Seismic Transducers, (Ii) LVDT Accelerometers, (Iii) Piezo-Electric Accelerometersamritsaikias4No ratings yet
- Unit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Document16 pagesUnit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Deep ChowdhuryNo ratings yet
- General Instrumentation 21.22Document23 pagesGeneral Instrumentation 21.22sanusi bello bakuraNo ratings yet
- Eee Iii I emDocument81 pagesEee Iii I emkoko wawaNo ratings yet
- Model Answer For ELECTRICAL MEASUREMENTDocument20 pagesModel Answer For ELECTRICAL MEASUREMENTazhar3303No ratings yet
- Speed SensorsDocument8 pagesSpeed Sensorsajd.nanthakumarNo ratings yet
- PHY 281 Experiments 4Document16 pagesPHY 281 Experiments 4ALAA SHATANo ratings yet
- Unit 1Document129 pagesUnit 1priyaNo ratings yet
- Measurement Electrical HomeWorkDocument9 pagesMeasurement Electrical HomeWorkEng.Theyazen Al-dubibiNo ratings yet
- Electrical Measurements & Instrumentation: Malla Reddy College of Engineering & TechnologyDocument154 pagesElectrical Measurements & Instrumentation: Malla Reddy College of Engineering & Technologydinesh0% (1)
- Electrical Measurement InstrumentDocument81 pagesElectrical Measurement Instrumentsinusah5678No ratings yet
- Vibration MeasurementDocument23 pagesVibration MeasurementAxenta100% (2)
- Measuring Instruments: By: Sajid Hussain QaziDocument30 pagesMeasuring Instruments: By: Sajid Hussain Qaziurvish_soniNo ratings yet
- Module - V: Electrical MeasurementsDocument31 pagesModule - V: Electrical MeasurementsSaandeep Reddipalli 21BCE2885No ratings yet
- Measuring Instruments: 3 Sem Department of Electrical Engineering Atmiya Institute of Tech. & Science, RajkotDocument30 pagesMeasuring Instruments: 3 Sem Department of Electrical Engineering Atmiya Institute of Tech. & Science, RajkotRaison D EtreNo ratings yet
- EEM Unit 2Document20 pagesEEM Unit 2Bhavesh BodkeNo ratings yet
- 3.2 Sensors and TransducersDocument38 pages3.2 Sensors and Transducersjohanna shaanyenengeNo ratings yet
- Classification of Instrument PDFDocument21 pagesClassification of Instrument PDFAnanya SrivastavaNo ratings yet
- EEEE2201 Lecture Note Chap2Document10 pagesEEEE2201 Lecture Note Chap2Fataahu Nyuydze KehkimokiNo ratings yet
- Electrical Indicating InstrumentsDocument120 pagesElectrical Indicating InstrumentsSukanta MallickNo ratings yet
- Chapter 6Document13 pagesChapter 6steven pitchNo ratings yet
- Pressure Voltage: Chapter Review QuestionsDocument16 pagesPressure Voltage: Chapter Review QuestionsPrakash Chandran CNo ratings yet
- Eee 207 - Chapter 4Document19 pagesEee 207 - Chapter 4Naija RonaldoNo ratings yet
- PMMC InstrumentsDocument17 pagesPMMC InstrumentsKanak KhandelwalNo ratings yet
- Movement in DC SolenoidsDocument10 pagesMovement in DC SolenoidsZeynep Emirhan Şenyüz100% (1)
- Module 5Document15 pagesModule 5flt.kdsh1221No ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Gates With Their Truth Tables and SymbolsDocument2 pagesGates With Their Truth Tables and Symbolsatul206No ratings yet
- Method of ImagesDocument12 pagesMethod of Imagesatul206No ratings yet
- Transient Waves On Transmission LinesDocument21 pagesTransient Waves On Transmission Linesatul206No ratings yet
- Electroquasistatic ForcesDocument10 pagesElectroquasistatic Forcesatul206No ratings yet
- Electroquasistatic and Magnetoquasistatic Fields and Boundary ConditionsDocument13 pagesElectroquasistatic and Magnetoquasistatic Fields and Boundary Conditionsatul206No ratings yet
- AC Circuits Concepts: Chapter-IIIDocument12 pagesAC Circuits Concepts: Chapter-IIIatul206No ratings yet
- E LearningDocument8 pagesE Learningatul206No ratings yet
- Decorticated HazelnutsDocument11 pagesDecorticated HazelnutsRadu Victor TapuNo ratings yet
- GE Protimeter MMS ManualDocument28 pagesGE Protimeter MMS ManualconstructermanNo ratings yet
- Characteristics of Measurement SystemsDocument34 pagesCharacteristics of Measurement SystemsAayush PatidarNo ratings yet
- M & I PDFDocument13 pagesM & I PDFvirendraNo ratings yet
- Multi-Function Measuring Instrument: Testo 435 - The Allrounder For Ventilation and Indoor Air QualityDocument8 pagesMulti-Function Measuring Instrument: Testo 435 - The Allrounder For Ventilation and Indoor Air Qualityzivkovic brankoNo ratings yet
- Physics TermsDocument7 pagesPhysics TermsAndera JeniseNo ratings yet
- Grade7Research 1st Quarter MeasuringDocument17 pagesGrade7Research 1st Quarter Measuringrojen pielagoNo ratings yet
- LEC 02.07 Determination of The Hydration Enthalpy of An ElectrolyteDocument4 pagesLEC 02.07 Determination of The Hydration Enthalpy of An ElectrolyteRoslinah SaindiNo ratings yet
- Indonesian Government Regulation For MeteringDocument4 pagesIndonesian Government Regulation For MeteringirfanNo ratings yet
- Two Marks Questions Mechatronics (MH1031) Unit - 1Document12 pagesTwo Marks Questions Mechatronics (MH1031) Unit - 1cakejhNo ratings yet
- Electrical Engineering Technology - Higher National Diploma (HND)Document19 pagesElectrical Engineering Technology - Higher National Diploma (HND)Chibueze EzeokaforNo ratings yet
- Ems PDFDocument99 pagesEms PDFSathish DevNo ratings yet
- Manual ZRM 6006 en v1.0Document15 pagesManual ZRM 6006 en v1.0Patrick LaoNo ratings yet
- Testo350 (Old)Document76 pagesTesto350 (Old)cdepedroNo ratings yet
- Mec 314Document14 pagesMec 314Vinu ThomasNo ratings yet
- GENERAL SCIENCE CAPSULE 2015 FOR SSC CGL/LDC & Other Entrances For Newstechcafe - Com ReadersDocument29 pagesGENERAL SCIENCE CAPSULE 2015 FOR SSC CGL/LDC & Other Entrances For Newstechcafe - Com ReadersNewstechcafeNo ratings yet
- Physics Lab ApparatusDocument5 pagesPhysics Lab ApparatusAb No0% (1)
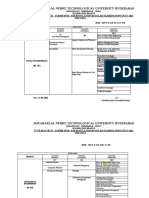
- JNTUH B.tech IV-II (R18) 2nd Mid Time Table June 2023Document20 pagesJNTUH B.tech IV-II (R18) 2nd Mid Time Table June 2023GADDAM ANIL KUMARNo ratings yet
- Airflow HandbookDocument18 pagesAirflow HandbookAts Phils CorpNo ratings yet
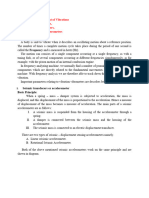
- Dynamic Characteristics of InstrumentsDocument5 pagesDynamic Characteristics of InstrumentsAnonymous nJjlquhNo ratings yet
- B.tech 4-2 R18 Timetables FNDocument9 pagesB.tech 4-2 R18 Timetables FNprasanna hamsikaNo ratings yet
- Radwag Balance ManualDocument74 pagesRadwag Balance Manualsmic3904No ratings yet
- Expt 1 - PHY400 - MeasurementDocument5 pagesExpt 1 - PHY400 - MeasurementMubarak Noor AzliNo ratings yet
- Frequency MeterDocument5 pagesFrequency MeterNh Chuminda YapaNo ratings yet
- Astm G 150 PDFDocument13 pagesAstm G 150 PDFJORGE ARTURO TORIBIO HUERTA100% (2)
- Leakage Clamp Meter: Users ManualDocument74 pagesLeakage Clamp Meter: Users ManualJavier Laso LópezNo ratings yet
- Technical Manual Instrumentation DamsDocument128 pagesTechnical Manual Instrumentation Damsbhathiya01No ratings yet
- 949pm - 10.EPRA JOURNALS 9524Document3 pages949pm - 10.EPRA JOURNALS 9524Muhammed khalid KhanNo ratings yet