Download as pdf or txt
You might also like
- Step 2 CK BibleDocument435 pagesStep 2 CK Biblewilksebas100% (13)
- Jangho Philippines Projects Presentation PDFDocument46 pagesJangho Philippines Projects Presentation PDFHao LiNo ratings yet
- Wilson 1990Document13 pagesWilson 1990Sebastiao SilvaNo ratings yet
- Design of Diagonal Cross Bracings - Part 1 Theoretical Study PDFDocument5 pagesDesign of Diagonal Cross Bracings - Part 1 Theoretical Study PDFaapennsylvaniaNo ratings yet
- Maptek I-Site Studio Geotechnical ModuleDocument4 pagesMaptek I-Site Studio Geotechnical ModulekennycasillaNo ratings yet
- Appendix B The Boundary Element MethodDocument3 pagesAppendix B The Boundary Element MethodAnonymous zvQGXzNo ratings yet
- Bem Project Must UseDocument22 pagesBem Project Must UseFemi Richard FakoyaNo ratings yet
- FEM3 Liniear Static AnalysisDocument37 pagesFEM3 Liniear Static AnalysisbiboNo ratings yet
- Simplified Weight Function For Calculating Stress Intensity Factor in Complicated Stress Distributions Jirapong KasivitamnuayDocument12 pagesSimplified Weight Function For Calculating Stress Intensity Factor in Complicated Stress Distributions Jirapong Kasivitamnuaymoustafa mahmoudNo ratings yet
- (Hinton, 1976) A Note On Mass Lumping and Related Processes in The Finite Element MethodDocument5 pages(Hinton, 1976) A Note On Mass Lumping and Related Processes in The Finite Element MethodLeon Valencia RestrepoNo ratings yet
- CH 1Document64 pagesCH 1shaffetiNo ratings yet
- Axisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ADocument15 pagesAxisymmetric Stress Analysis: Z Denote Respectively The Radial and Axial Coordinates of ApnaxdNo ratings yet
- Gravitational Self-Force 2Document50 pagesGravitational Self-Force 2condensedmatterphysNo ratings yet
- An Updated Reference Configuration FormuDocument12 pagesAn Updated Reference Configuration FormuMiroslav ZivkovicNo ratings yet
- Fea-Finite Element Analysis: Chapter-1 Stress TensorDocument106 pagesFea-Finite Element Analysis: Chapter-1 Stress Tensorkamsubh66No ratings yet
- Numerical Technique in Plasticity Including Solution Advancement ControlDocument20 pagesNumerical Technique in Plasticity Including Solution Advancement ControlSebastiao SilvaNo ratings yet
- Self Dual Massive Spin 2Document10 pagesSelf Dual Massive Spin 2Pio J. Arias G.No ratings yet
- Michelsen The Isothermal Flash Problem 2 PhasDocument20 pagesMichelsen The Isothermal Flash Problem 2 Phasgggggg82No ratings yet
- Pre Stressed Modal Analysis Using FiniteDocument8 pagesPre Stressed Modal Analysis Using Finitegreat2008No ratings yet
- 2D Cartesian ElasticityDocument13 pages2D Cartesian ElasticityMartin KoraNo ratings yet
- 3-Problems in ElasticityDocument58 pages3-Problems in Elasticityali381100% (1)
- Torque RDocument27 pagesTorque RWilson Jesus Rojas BayonaNo ratings yet
- Michelsen The Isothermal Flash Problem 2 Phas PDFDocument20 pagesMichelsen The Isothermal Flash Problem 2 Phas PDFpasha khanNo ratings yet
- Thermal Activation in Atomic Friction: Revisiting The Theoretical AnalysisDocument8 pagesThermal Activation in Atomic Friction: Revisiting The Theoretical AnalysisSyd BarrettNo ratings yet
- Engineering Structure &materialsDocument18 pagesEngineering Structure &materialsnitishk25No ratings yet
- Strain (Continuation 2) PDFDocument4 pagesStrain (Continuation 2) PDFNadlor Gasco OzausNo ratings yet
- Thesis WeightFunctions ChapterDocument10 pagesThesis WeightFunctions ChapterOjanomare ChojaNo ratings yet
- Anal de FisicaDocument12 pagesAnal de FisicaJhonatan RosalesNo ratings yet
- Angelier 1990Document14 pagesAngelier 1990Javier Roberto De AndaNo ratings yet
- CH 02Document61 pagesCH 02LeonardoMadeira11No ratings yet
- Chapter2 PDFDocument18 pagesChapter2 PDFamirthraj74No ratings yet
- Articulo Hidro HeavyDocument25 pagesArticulo Hidro HeavyManuel SuarezNo ratings yet
- Schmidt 1980Document11 pagesSchmidt 1980ᎯᏁ-ᎯᎥᏁᏁ ᎯᏁ-ᎯᎥᏁᏁNo ratings yet
- Plane Stress and Plane Strain: 4.2.1 Displacement FunctionsDocument25 pagesPlane Stress and Plane Strain: 4.2.1 Displacement FunctionswearplayNo ratings yet
- Brower 1983Document4 pagesBrower 1983aparupghoshNo ratings yet
- 07Document24 pages07pnaxdNo ratings yet
- Modification of Hall-Yarborough Equation of State For Predicting Gas Compressibility FactorsDocument11 pagesModification of Hall-Yarborough Equation of State For Predicting Gas Compressibility FactorsNicolas CastañoNo ratings yet
- The Isothermal Flash Problem Part 1 Stability M.MichelsenDocument20 pagesThe Isothermal Flash Problem Part 1 Stability M.MichelsenJose EduardoNo ratings yet
- Ugular Adv Mechanics AppendixDocument57 pagesUgular Adv Mechanics AppendixFiras DiknashNo ratings yet
- Cohen Periodic Homogénisation Cubic 2004Document17 pagesCohen Periodic Homogénisation Cubic 2004auslenderNo ratings yet
- Deformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelDocument14 pagesDeformation and Flow of Solids: Colloqijium Madrid September 26-39, 1965 R. GrammelSapari VelNo ratings yet
- Continuum Micro-Mechanics of Elastoplastic Polycrystals PDFDocument13 pagesContinuum Micro-Mechanics of Elastoplastic Polycrystals PDFChandra ClarkNo ratings yet
- Drilling DOFDocument11 pagesDrilling DOFDaniele Di LucaNo ratings yet
- On The Theory of Transverse Bending of Elastic PlatestDocument10 pagesOn The Theory of Transverse Bending of Elastic PlatestArthur LeandroNo ratings yet
- 767 - Ch5. 1D ThermoelasticityDocument18 pages767 - Ch5. 1D ThermoelasticityFelipe Carrasco DuránNo ratings yet
- 1-1 Stress Analysis and DesignDocument25 pages1-1 Stress Analysis and Design陈韦权No ratings yet
- Analysis of Stresses:: X y XyDocument7 pagesAnalysis of Stresses:: X y Xypmm05479No ratings yet
- Bianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityDocument8 pagesBianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityManuel RodriguesNo ratings yet
- Smtdia B R R R, Albuquerque, New Mexico 87115, U.S.ADocument14 pagesSmtdia B R R R, Albuquerque, New Mexico 87115, U.S.ANilthson Noreña ValverdeNo ratings yet
- A Study of Rectangular Plate Under Colinear Load With Both Approximate and Exact SolutionDocument53 pagesA Study of Rectangular Plate Under Colinear Load With Both Approximate and Exact SolutionKaren SullivanNo ratings yet
- MIT3 11F99 AiryDocument14 pagesMIT3 11F99 AiryADITYANo ratings yet
- Limit Analysis of Structures Formed From Rigid BlocksDocument19 pagesLimit Analysis of Structures Formed From Rigid Blocksmnoym027No ratings yet
- On The Computation of Plastic Stress-Strain Relations For Polycrystalline MetalsDocument9 pagesOn The Computation of Plastic Stress-Strain Relations For Polycrystalline MetalsChandra ClarkNo ratings yet
- Thermal Ratcheting of A BeamDocument33 pagesThermal Ratcheting of A Beammilan44No ratings yet
- 248 / MARCH 1975 Transactions of The ASME: X + Fix) + G (X) Pit)Document1 page248 / MARCH 1975 Transactions of The ASME: X + Fix) + G (X) Pit)Elizabeth MendezNo ratings yet
- A Novel Cavity Expansion Based Analytical Tool and Its Potential Application For Energy Pile FoundationDocument7 pagesA Novel Cavity Expansion Based Analytical Tool and Its Potential Application For Energy Pile FoundationMARCOSNo ratings yet
- BEMpdfDocument16 pagesBEMpdfAaditya VikramNo ratings yet
- Closed-Form SolutionsDocument13 pagesClosed-Form SolutionsBza ZaBugNo ratings yet
- CSCO PicassoDocument33 pagesCSCO PicassoMorion BortaNo ratings yet
- Reissner - 1976 Thick PlatesDocument5 pagesReissner - 1976 Thick PlatesIoannisPerseusAntypasNo ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Algebraic Methods in Statistical Mechanics and Quantum Field TheoryFrom EverandAlgebraic Methods in Statistical Mechanics and Quantum Field TheoryNo ratings yet
- Fourier Restriction for Hypersurfaces in Three Dimensions and Newton Polyhedra (AM-194)From EverandFourier Restriction for Hypersurfaces in Three Dimensions and Newton Polyhedra (AM-194)No ratings yet
- Lie Group Solutions of MagnetohydrodynamicsDocument9 pagesLie Group Solutions of MagnetohydrodynamicsI Made WiragunarsaNo ratings yet
- Existence and Uniqueness Results For A Smooth Model ofDocument5 pagesExistence and Uniqueness Results For A Smooth Model ofI Made WiragunarsaNo ratings yet
- Keat 1996Document5 pagesKeat 1996I Made WiragunarsaNo ratings yet
- Jia 1988Document15 pagesJia 1988I Made WiragunarsaNo ratings yet
- Singapore TerminalDocument9 pagesSingapore TerminalKai Yuan TeoNo ratings yet
- Abdominal Case Study CompiledDocument392 pagesAbdominal Case Study CompiledIshak IzharNo ratings yet
- Module 4 Family and Consumer Life Skills 5Document10 pagesModule 4 Family and Consumer Life Skills 5PAGHASIAN, RENAROSE JOYNo ratings yet
- Gut Health Mindfulness Guide FREEBIEDocument11 pagesGut Health Mindfulness Guide FREEBIERaquel Orozco VargasNo ratings yet
- TECHNOLOGY1 Answer-1Document6 pagesTECHNOLOGY1 Answer-1JlkKumarNo ratings yet
- A8VO80Document27 pagesA8VO80Jose Salvador100% (1)
- Aviation Indutry in IndiaDocument20 pagesAviation Indutry in IndiayuktimNo ratings yet
- MIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFDocument50 pagesMIL-STD-1168B (Ammunition Lot Numbering and Amm. Data Card) PDFzorlon1No ratings yet
- Advanced GrammarDocument73 pagesAdvanced GrammarBehnam iziNo ratings yet
- M2 Merge (Nirali+Singhgad+PurpleHat)Document896 pagesM2 Merge (Nirali+Singhgad+PurpleHat)Radhika GaikwadNo ratings yet
- Mohammad Faisal Haroon - Envr506 - Week7Document4 pagesMohammad Faisal Haroon - Envr506 - Week7Hasan AnsariNo ratings yet
- Your DBX707Document16 pagesYour DBX707Sifiso DubeNo ratings yet
- CH 02Document48 pagesCH 02miathegirl9No ratings yet
- WASS Form Proposal Adriana Ressiore Questions UpdatedDocument19 pagesWASS Form Proposal Adriana Ressiore Questions UpdatedMaria Fernanda MatosNo ratings yet
- Subject Name: Biology 9Document22 pagesSubject Name: Biology 9Naveed Ahmed ButtNo ratings yet
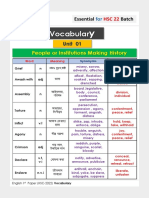
- Vocabulary HSC 22 PDFDocument28 pagesVocabulary HSC 22 PDFMadara Uchiha83% (6)
- 2 1 Fg8jglt Eep Final (PM)Document1 page2 1 Fg8jglt Eep Final (PM)hyde2520015754No ratings yet
- Your Space 1 Skills Test 10Document2 pagesYour Space 1 Skills Test 10Maxi ComasNo ratings yet
- Aerodynamics Finals Lecture PDFDocument10 pagesAerodynamics Finals Lecture PDFelle liNo ratings yet
- 3A Demand EstimationlDocument109 pages3A Demand EstimationlAlok ShuklaNo ratings yet
- Benefits of FastingDocument6 pagesBenefits of FastingAfnanNo ratings yet
- Journal of Adhesion Science and TechnologyDocument20 pagesJournal of Adhesion Science and TechnologyfrvvNo ratings yet
- Motadata EMS DatasheetDocument11 pagesMotadata EMS DatasheetAnush BhardwajNo ratings yet
- About Maths 8: AnswersDocument43 pagesAbout Maths 8: AnswersSean GongNo ratings yet
- Germany Import ExportDocument12 pagesGermany Import Exporttariquekhan143No ratings yet
- TX 433Document8 pagesTX 433Sai PrintersNo ratings yet
- The Wheel and The BobsleighDocument2 pagesThe Wheel and The BobsleighHarisNo ratings yet