Download as pdf or txt
You might also like
- Solution Manual for an Introduction to Equilibrium ThermodynamicsFrom EverandSolution Manual for an Introduction to Equilibrium ThermodynamicsNo ratings yet
- Handbook For Installation of Medium Voltage LinesDocument106 pagesHandbook For Installation of Medium Voltage Linesajayi micheal sunday100% (1)
- USALI 10th VS 11th EditionDocument7 pagesUSALI 10th VS 11th EditionvictoregomezNo ratings yet
- Assignment #1 SolutionDocument4 pagesAssignment #1 SolutionSaqib Irshad100% (1)
- Gear 3Document16 pagesGear 3poncatoera100% (1)
- Window Thickness CalculatinDocument10 pagesWindow Thickness CalculatinDinakaranNo ratings yet
- Fire Case (Unwetted) PSVDocument2 pagesFire Case (Unwetted) PSVaw_aeNo ratings yet
- Material Alloy KHR32CDocument2 pagesMaterial Alloy KHR32CKHNo ratings yet
- ROPA Euro-Tiger V8-3 Englisch 2008Document20 pagesROPA Euro-Tiger V8-3 Englisch 2008hummerjoseNo ratings yet
- IC TroubleshootingDocument64 pagesIC TroubleshootingKriti TyagiNo ratings yet
- Fan Power Pressure Loss CalculationDocument3 pagesFan Power Pressure Loss Calculationmashkhal luqmanNo ratings yet
- (Chapter 6) Examples PDFDocument6 pages(Chapter 6) Examples PDFKarwan GoodNo ratings yet
- Beam Laterally SupportedDocument23 pagesBeam Laterally SupportedSneha TPNo ratings yet
- Fluid Ass2,3Document9 pagesFluid Ass2,3bestniazNo ratings yet
- 31-05-20 - WAT-46 - Key - Sol - SDocument9 pages31-05-20 - WAT-46 - Key - Sol - SPonharish kumar.JNo ratings yet
- ConductionDocument34 pagesConductionguna sekaranNo ratings yet
- Kalleri Balance Above Lintel AbstractDocument1 pageKalleri Balance Above Lintel Abstractahmed aarifNo ratings yet
- HW3 SolutionDocument8 pagesHW3 Solution劉德信No ratings yet
- EEEQ 221 Fluid Mechanics 7B - Notes For 2nd February 2018Document44 pagesEEEQ 221 Fluid Mechanics 7B - Notes For 2nd February 2018Ellie AwiNo ratings yet
- New Tutorial 3 With SolutionDocument6 pagesNew Tutorial 3 With SolutionNaveed AhmadNo ratings yet
- Series 500Document4 pagesSeries 500Nilton GarcíaNo ratings yet
- Asig 1 - Máquinas 2Document9 pagesAsig 1 - Máquinas 2isaac.cortesNo ratings yet
- 2024-JEE Advanced Full Test-1 - Paper-1 - Solutions PDFDocument18 pages2024-JEE Advanced Full Test-1 - Paper-1 - Solutions PDFSamNo ratings yet
- Problem Set 7 SolutionDocument16 pagesProblem Set 7 SolutionDivya KariaNo ratings yet
- Materials Q From 2023Document3 pagesMaterials Q From 2023Straw HatNo ratings yet
- FT 13 - 12 03 2023 PAPER 2 - SolutionsDocument14 pagesFT 13 - 12 03 2023 PAPER 2 - SolutionsArchit JindalNo ratings yet
- Ductless Wall Mini Split Air Conditioning 18000 BtuDocument2 pagesDuctless Wall Mini Split Air Conditioning 18000 BtuReliableACNo ratings yet
- 2102 Tut 10Document13 pages2102 Tut 10ziyuanwoo6No ratings yet
- RC Design EC2 v1.8Document43 pagesRC Design EC2 v1.8NELSONHUGO100% (1)
- Aiits PT-2 Solution Jee Adv Paper 1Document11 pagesAiits PT-2 Solution Jee Adv Paper 1Deneb Shah ShahNo ratings yet
- Solutions: Section ADocument8 pagesSolutions: Section ARare RootNo ratings yet
- 6 Timber Beam & ColumnDocument34 pages6 Timber Beam & ColumnSneha TPNo ratings yet
- 221391industrial Workbook Solution Part 1 2024Document30 pages221391industrial Workbook Solution Part 1 2024Siddharth SatyarthiNo ratings yet
- Machine Design Problem Sets and SolutionsDocument5 pagesMachine Design Problem Sets and SolutionsKane Andrie TumulakNo ratings yet
- שיעורי בית פיזיקהDocument7 pagesשיעורי בית פיזיקהlinshani96No ratings yet
- All India Test Series: Concept Recapitulation Test - IiiDocument16 pagesAll India Test Series: Concept Recapitulation Test - IiiRandhir pandeyNo ratings yet
- Narayana 09-06-2022 - Outgoing SR - Jee Main Model Gtm-7 - SolDocument16 pagesNarayana 09-06-2022 - Outgoing SR - Jee Main Model Gtm-7 - SolYuva AkhilNo ratings yet
- ALPS 2336 Physics Assignment SolutionsDocument12 pagesALPS 2336 Physics Assignment SolutionsSujal KapoorNo ratings yet
- ERSS-Lecture 2 (ChiewSP 5mar20)Document30 pagesERSS-Lecture 2 (ChiewSP 5mar20)sunilarunaNo ratings yet
- Maxtherm - Solid Fuel Range BoilersDocument4 pagesMaxtherm - Solid Fuel Range BoilersAbishekh SekharNo ratings yet
- WO Lecture 8Document9 pagesWO Lecture 8RaadNo ratings yet
- Influence of Doping On Si CarbideDocument7 pagesInfluence of Doping On Si CarbideBlablablaNo ratings yet
- P - Vii - SolutionDocument7 pagesP - Vii - SolutionShubham JainNo ratings yet
- JEE Advanced Final Practice Test-2 - Paper-2 - SolutionsDocument16 pagesJEE Advanced Final Practice Test-2 - Paper-2 - SolutionsAnonymous tricksNo ratings yet
- RC Design EC2 v1.9Document64 pagesRC Design EC2 v1.9mohammed alebiedNo ratings yet
- Note 26 Apr 2024 (2) 2Document31 pagesNote 26 Apr 2024 (2) 2dioxotwitchNo ratings yet
- JANUARY 05, 2020 Schedule of Loads Acosta, Kurt Francis HDocument1 pageJANUARY 05, 2020 Schedule of Loads Acosta, Kurt Francis HKurt Francis AcostaNo ratings yet
- Elasticity and Fluid Machanics-08-Solution 1Document9 pagesElasticity and Fluid Machanics-08-Solution 1Raju SinghNo ratings yet
- Infrared Remote Control 558Document2 pagesInfrared Remote Control 558meetbshahNo ratings yet
- Headloss Calculation Sheet Excel WorksheetDocument8 pagesHeadloss Calculation Sheet Excel WorksheetSanjeev Kumar DasNo ratings yet
- Ceramic Capacitor: TC / Hik High Voltage Ceramic CapacitorsDocument4 pagesCeramic Capacitor: TC / Hik High Voltage Ceramic CapacitorsIdajet ProjkoNo ratings yet
- 2011 6 Ac928129Document31 pages2011 6 Ac928129Kevin RamonNo ratings yet
- Tutorial 2 PDFDocument5 pagesTutorial 2 PDFSyahda RahmanNo ratings yet
- Ker Ker Liq Total Bea Liq Total Bea Liq Liq Liq Liq Liq LiqDocument6 pagesKer Ker Liq Total Bea Liq Total Bea Liq Liq Liq Liq Liq LiqKok Soon ChongNo ratings yet
- 14 Finta Eprida 25822019 Tugas 2 McCormackDocument187 pages14 Finta Eprida 25822019 Tugas 2 McCormackArdhiNo ratings yet
- Maeg2030 HW2Document6 pagesMaeg2030 HW2AdiosNo ratings yet
- Seminary 4Document4 pagesSeminary 4Vasile GrosuNo ratings yet
- Sec: SR MPC Out Going Grand Test - 33 Time: 3 Hrs Max. Marks: 300Document27 pagesSec: SR MPC Out Going Grand Test - 33 Time: 3 Hrs Max. Marks: 300sarthaksingh20122No ratings yet
- Fiitjee All India Test Series: JEE (Main) - 2019 Answers, Hints & SolutionsDocument13 pagesFiitjee All India Test Series: JEE (Main) - 2019 Answers, Hints & SolutionsmadhavNo ratings yet
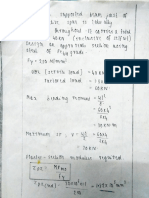
- 1.1 A Magnetic Circuit With A Single Air Gap Is Shown in Fig. 1.24. The Core DimensionsDocument31 pages1.1 A Magnetic Circuit With A Single Air Gap Is Shown in Fig. 1.24. The Core DimensionsAsim AliNo ratings yet
- 13.12.2020 - JR Iit Co - Super Chaina - N120 - Adv - 2016 - P1 - Model Key PDFDocument11 pages13.12.2020 - JR Iit Co - Super Chaina - N120 - Adv - 2016 - P1 - Model Key PDFYugandher BadanaNo ratings yet
- FABCO Pipe Catalog PDFDocument24 pagesFABCO Pipe Catalog PDFMohamed AklNo ratings yet
- 2022 Mock JEE Main-3 - SolutionsDocument15 pages2022 Mock JEE Main-3 - SolutionsAshish GuleriaNo ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsRating: 5 out of 5 stars5/5 (1)
- Project PresentationDocument17 pagesProject PresentationLong Trần QuangNo ratings yet
- An Ensembling Architecture Incorporating Machine LDocument25 pagesAn Ensembling Architecture Incorporating Machine LLong Trần QuangNo ratings yet
- Is Attention All You Need For Intraday Forex TradiDocument19 pagesIs Attention All You Need For Intraday Forex TradiLong Trần Quang100% (1)
- Performance Evaluation of A Forex System Marketing Prospects Analysis 1528 2635 26 3 247Document19 pagesPerformance Evaluation of A Forex System Marketing Prospects Analysis 1528 2635 26 3 247Long Trần QuangNo ratings yet
- Application of Probiotics in Commercial Layer Diets: A ReviewDocument12 pagesApplication of Probiotics in Commercial Layer Diets: A ReviewDhikaNo ratings yet
- Microcatchment: NegarimDocument11 pagesMicrocatchment: Negarimhaithamelramlawi7503100% (1)
- Artisan: DefinitiveDocument370 pagesArtisan: DefinitivebenjaroNo ratings yet
- English 102Document4 pagesEnglish 102chiubrit100% (1)
- June 2017 (v2) QP - Paper 2 CIE Maths IGCSE PDFDocument12 pagesJune 2017 (v2) QP - Paper 2 CIE Maths IGCSE PDFgrayNo ratings yet
- Ede ReportDocument15 pagesEde ReportSaraswathi SudharsanNo ratings yet
- CIBSE Pipe Sizing V2Document13 pagesCIBSE Pipe Sizing V2Sameer UddinNo ratings yet
- Alfa Laval SanitaryDocument10 pagesAlfa Laval SanitaryShrinivas TamaskarNo ratings yet
- Twindiscpto 308 SDocument12 pagesTwindiscpto 308 SBGNo ratings yet
- Solar Panel Repair BookDocument13 pagesSolar Panel Repair BookShiva PradhanNo ratings yet
- Lecture 6 Interpersonal RelationshipsDocument36 pagesLecture 6 Interpersonal RelationshipsZimi EnduranceNo ratings yet
- English 1-7Document41 pagesEnglish 1-7Rachel LipardoNo ratings yet
- Inovasi Minuman Berbasis WheyDocument8 pagesInovasi Minuman Berbasis WheyRizki Zulfan NurNo ratings yet
- Final MKTDocument34 pagesFinal MKTHong Anh VuNo ratings yet
- Project ReportDocument12 pagesProject ReportSasi DharNo ratings yet
- At The End of The Lesson The Students Are Expected To:: Dependent and Independent VariablesDocument9 pagesAt The End of The Lesson The Students Are Expected To:: Dependent and Independent VariablesYoo KeniNo ratings yet
- Chap 4 Research Method and Technical WritingDocument33 pagesChap 4 Research Method and Technical WritingEndalkchew FentahunNo ratings yet
- City of Makati Vs Nippon ExpressDocument8 pagesCity of Makati Vs Nippon ExpressMarie Mariñas-delos ReyesNo ratings yet
- PATANJALIDocument16 pagesPATANJALIAbhishek PandeyNo ratings yet
- Jharkhand Academic Council ResultDocument1 pageJharkhand Academic Council ResultMd Ahmad RazaNo ratings yet
- 06-خطة الإجراءات التصحيحية-Corrective Action PlanDocument11 pages06-خطة الإجراءات التصحيحية-Corrective Action Planحسن ابو فهدNo ratings yet
- La Investigacion en El Iese Research at Iese - CompressDocument27 pagesLa Investigacion en El Iese Research at Iese - CompressSangría PanchitaNo ratings yet
- S11 1321 01aDocument20 pagesS11 1321 01aMarsKwokNo ratings yet
- HIP ChecklistDocument2 pagesHIP ChecklistVathzala KrishnasamyNo ratings yet
- NTPC Sabbatical SchemeDocument10 pagesNTPC Sabbatical Schemedhanu sreeNo ratings yet
- Reaffirmed 2001: For Current Committee PersonnelDocument27 pagesReaffirmed 2001: For Current Committee PersonnelMarko's Brazon'No ratings yet