
Viscosity
Viscosity
You might also like
- Technical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Document80 pagesTechnical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Nelson Piquet Souto Maior100% (1)
- Solutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaDocument81 pagesSolutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaANTONIO RODRIGUESNo ratings yet
- The Vertical Dimension in Prosthesis and Orthognathodontics PDFDocument380 pagesThe Vertical Dimension in Prosthesis and Orthognathodontics PDFPatri Meisaros100% (1)
- Lincoln-Sl1 Centro-Matic Injector PDFDocument5 pagesLincoln-Sl1 Centro-Matic Injector PDFTaufan Nanjaya100% (1)
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Document7 pagesProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNo ratings yet
- C P - PH 354: Omputational HysicsDocument13 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
- Possible Questions Exam Non-Equilibrium Statistical MechanicsDocument4 pagesPossible Questions Exam Non-Equilibrium Statistical MechanicsEgop3105No ratings yet
- S4H - 074 How To Approach Fit To Standard Analysis - CloudDocument44 pagesS4H - 074 How To Approach Fit To Standard Analysis - CloudRaymundo PiresNo ratings yet
- Artificial ViscosityDocument5 pagesArtificial ViscosityDanielNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Frac Coeff MC RevDocument25 pagesFrac Coeff MC Revأم الخير تافنيNo ratings yet
- Advection Eqn Is UnstableDocument9 pagesAdvection Eqn Is UnstableZakria ToorNo ratings yet
- Numerical Solution For Fokker-Planck Equations in AcceleratorsDocument3 pagesNumerical Solution For Fokker-Planck Equations in AcceleratorsyasmeenNo ratings yet
- SadikuDocument4 pagesSadikuFelipe LucenaNo ratings yet
- Finite DifferenceDocument9 pagesFinite DifferenceSiddra KhawarNo ratings yet
- M2an ParabolicDocument27 pagesM2an ParabolicMurali ReddyNo ratings yet
- Numerical Solutions of The Space-Time Fractional Advection-Dispersion EquationDocument14 pagesNumerical Solutions of The Space-Time Fractional Advection-Dispersion EquationNour AttiaNo ratings yet
- Practice - Questions - 2, System ScienceDocument3 pagesPractice - Questions - 2, System ScienceSONUNo ratings yet
- Analytical Solution For The Time-Fractional Telegraph EquationDocument14 pagesAnalytical Solution For The Time-Fractional Telegraph EquationhabibNo ratings yet
- Numerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeDocument9 pagesNumerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeVe LopiNo ratings yet
- ClassnotesDocument118 pagesClassnotesfranklloyd1975No ratings yet
- Solving Differential Riccati Equations A NonlinearDocument20 pagesSolving Differential Riccati Equations A NonlinearCarlosNo ratings yet
- Some Fourier Theory For Time Series AnalysisDocument12 pagesSome Fourier Theory For Time Series AnalysisDaniela Guerrero PeñaNo ratings yet
- Compressive Wave ComputationDocument45 pagesCompressive Wave ComputationmrfintrNo ratings yet
- Discrete Maximal Regularity of Time-Stepping SchemDocument32 pagesDiscrete Maximal Regularity of Time-Stepping Schemأم الخير تافنيNo ratings yet
- Functional QF TDocument25 pagesFunctional QF TRandallHellVargasPradinettNo ratings yet
- Discrete and Continuous Dynamical Systems Volume 16, Number 1, September 2006Document18 pagesDiscrete and Continuous Dynamical Systems Volume 16, Number 1, September 2006vaNo ratings yet
- On The Backward Problem For Parabolic Equations With MemoryDocument19 pagesOn The Backward Problem For Parabolic Equations With MemorykamranNo ratings yet
- 10.2478 - Cmam 2001 0009Document13 pages10.2478 - Cmam 2001 0009kotavijaykiran.iitbNo ratings yet
- MM043-p-16 Solution To The SystemDocument9 pagesMM043-p-16 Solution To The SystemAlishba FatimaNo ratings yet
- 2203.10573 EushsbbjsjjsDocument57 pages2203.10573 EushsbbjsjjsTim HariggumNo ratings yet
- cfd1 Probs2Document4 pagescfd1 Probs2whateverNo ratings yet
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDocument15 pagesIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaNo ratings yet
- A Brief Introduction To Nonlinear Vibrations: 1 General CommentsDocument20 pagesA Brief Introduction To Nonlinear Vibrations: 1 General CommentsMjNo ratings yet
- Linear AdvectionDocument6 pagesLinear AdvectionErol BicerNo ratings yet
- Assignment4-2023 For Numerical AnalysisDocument3 pagesAssignment4-2023 For Numerical AnalysisPratyush Kumar SinghNo ratings yet
- High-Order Time-Accurate Schemes For Singularly Perturbed Parabolic Convection-Diffusion Problems With Robin Boundary ConditionsDocument23 pagesHigh-Order Time-Accurate Schemes For Singularly Perturbed Parabolic Convection-Diffusion Problems With Robin Boundary ConditionsSultan GodanaNo ratings yet
- Multiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeDocument14 pagesMultiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeGustavo BalNo ratings yet
- Higher-Codimension Bifurcations Caused by Delay: Rong YuanDocument15 pagesHigher-Codimension Bifurcations Caused by Delay: Rong YuanEva KaslikNo ratings yet
- Assignment Ex04Document3 pagesAssignment Ex04Melbin SibyNo ratings yet
- Notes Lauri Oksanen Inverse PbsDocument24 pagesNotes Lauri Oksanen Inverse PbsAlba García RuizNo ratings yet
- Article Title 1Document12 pagesArticle Title 1alipirkhedriNo ratings yet
- Quantum ExamplesDocument26 pagesQuantum ExamplesAbdalmoedAlaiashyNo ratings yet
- PDE Notes2Document50 pagesPDE Notes2MaheshNo ratings yet
- 1 Estimating Uncertainties and Propagation of Errors: Physics 326, Final ExamDocument4 pages1 Estimating Uncertainties and Propagation of Errors: Physics 326, Final ExamJack BotNo ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- MIT QM Chap 01 PDFDocument26 pagesMIT QM Chap 01 PDFSergio Aguilera ChecoNo ratings yet
- 10.1007@s00233 016 9812 yDocument21 pages10.1007@s00233 016 9812 yOumaima BouaoultaineNo ratings yet
- Clavero-Jorge2017 Article AFractionalStepMethodFor2DParaDocument18 pagesClavero-Jorge2017 Article AFractionalStepMethodFor2DParajoginder singhNo ratings yet
- Maintaining Coherence in Quantum Computers.Document13 pagesMaintaining Coherence in Quantum Computers.Jingkai JiaNo ratings yet
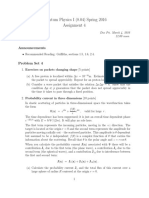
- Quantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsDocument5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsFabian M Vargas FontalvoNo ratings yet
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERNo ratings yet
- A New Modification in The Exponential Rational Function Method For Nonlinear Fractional Differential EquationsDocument11 pagesA New Modification in The Exponential Rational Function Method For Nonlinear Fractional Differential Equationspranaygoswami1983No ratings yet
- Simulation of Stopped DiffusionsDocument22 pagesSimulation of Stopped DiffusionssupermanvixNo ratings yet
- The Fractional Time Step ProcedureDocument8 pagesThe Fractional Time Step ProcedureSharathKumarNo ratings yet
- Acquisition and Analysis of Neural Data: Analytical Problem Set 1Document3 pagesAcquisition and Analysis of Neural Data: Analytical Problem Set 1PritamSenNo ratings yet
- Numerical Solution To The Van Der Pol Equation With Fractional DampingDocument5 pagesNumerical Solution To The Van Der Pol Equation With Fractional DampingLakshmi BarathiNo ratings yet
- 2023-2024 ProblemSetWeek3Document3 pages2023-2024 ProblemSetWeek3popbop67No ratings yet
- TrongDocument16 pagesTrongTrân TrọngNo ratings yet
- Hydrology 510 Quantitative Methods in Hydrology: MotiveDocument57 pagesHydrology 510 Quantitative Methods in Hydrology: MotiveybNo ratings yet
- Xu - Wave Approximation of Backward Heat Equation With Ricci FlowDocument34 pagesXu - Wave Approximation of Backward Heat Equation With Ricci Flowperson persinNo ratings yet
- MIT8 05F13 Chap 01 PDFDocument26 pagesMIT8 05F13 Chap 01 PDFKamilNo ratings yet
- Dispersion Estimates For Spherical Schrödinger Equations With Critical Angular MomentumDocument39 pagesDispersion Estimates For Spherical Schrödinger Equations With Critical Angular MomentumjhampiaNo ratings yet
- Exam 1Document6 pagesExam 1Umair KhanNo ratings yet
- 1985-1992 DSWA6328F Operations Charioteer EtcDocument494 pages1985-1992 DSWA6328F Operations Charioteer EtcDaniel TopaNo ratings yet
- EffectsDocument13 pagesEffectsDaniel TopaNo ratings yet
- Transparent Language English 6.0 Installation GuideDocument12 pagesTransparent Language English 6.0 Installation GuideDaniel TopaNo ratings yet
- Statistical Description of The Wave Front Aberration in The Human EyeDocument13 pagesStatistical Description of The Wave Front Aberration in The Human EyeDaniel TopaNo ratings yet
- Homotopy in The Zernike BasisDocument30 pagesHomotopy in The Zernike BasisDaniel TopaNo ratings yet
- PQR Amp WPQ Standard Testing Parameter WorksheetDocument4 pagesPQR Amp WPQ Standard Testing Parameter WorksheetvinodNo ratings yet
- 1osh LeadsDocument72 pages1osh Leadssaskiamogale100% (1)
- Reading Comprehension 2 (Teamwork & Competition)Document16 pagesReading Comprehension 2 (Teamwork & Competition)Ibtisam alanaziNo ratings yet
- HIVER Waivers sp22 Fady ElmessyDocument2 pagesHIVER Waivers sp22 Fady ElmessyFady Ezzat 1No ratings yet
- The World's First Free Tattoo and PiercingDocument34 pagesThe World's First Free Tattoo and Piercingapi-21988252No ratings yet
- List of Companies Having SAPDocument2 pagesList of Companies Having SAPKrushikeshNo ratings yet
- Db2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview QuestionsDocument21 pagesDb2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview Questionssroul4No ratings yet
- Aef2wb 34 35Document2 pagesAef2wb 34 35sigafile11No ratings yet
- 0.5ab Sin C 2018-03-19Document10 pages0.5ab Sin C 2018-03-19梁倬林No ratings yet
- Capd 000000144Document83 pagesCapd 000000144Capitol Breach DiscoveryNo ratings yet
- Rega Brio ManualDocument17 pagesRega Brio ManualjamocasNo ratings yet
- Proprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamageDocument2 pagesProprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamagePawan PalNo ratings yet
- Microbial Physiology in The Genomic Era: A Revolutionary TaleDocument21 pagesMicrobial Physiology in The Genomic Era: A Revolutionary TaleLiona PatriciaNo ratings yet
- Gospel Steel TrussDocument18 pagesGospel Steel TrussJoseph Cloyd L. LamberteNo ratings yet
- Nutanix: NCP-MCI-5.15 ExamDocument7 pagesNutanix: NCP-MCI-5.15 ExamAlvin BosqueNo ratings yet
- Fourier OpticsDocument9 pagesFourier Opticssal.paradise.1No ratings yet
- Safety Data Sheet Kerosene: NfpaDocument9 pagesSafety Data Sheet Kerosene: NfpaAliNo ratings yet
- CV TemplatesDocument3 pagesCV TemplatesMd Shohag AliNo ratings yet
- English ReviewDocument5 pagesEnglish ReviewCherry PinoNo ratings yet
- 89C51 Instruction SetDocument49 pages89C51 Instruction SetYashaswini B Srinivas100% (1)
- Equity ApplicationDocument3 pagesEquity ApplicationanniesachdevNo ratings yet
- Cash Flow StatementDocument16 pagesCash Flow Statementrajesh337masssNo ratings yet
- Al Burj Al Thaki Warning & Control Devices TR: To: Federal Tax AuthorityDocument3 pagesAl Burj Al Thaki Warning & Control Devices TR: To: Federal Tax AuthorityAL BURJ AL THAKINo ratings yet
- Material Property Data For Engineering MaterialsDocument35 pagesMaterial Property Data For Engineering Materialspraving76No ratings yet
- Juhani Pallasmaa Complete MonographDocument52 pagesJuhani Pallasmaa Complete MonographYang Yu100% (1)
- Coldharbour/Wrotham Road GravesendDocument28 pagesColdharbour/Wrotham Road GravesendWessex ArchaeologyNo ratings yet



























































































Download as pdf or txt
You might also like
- Technical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Document80 pagesTechnical Manual (Part A) Tatuus-Msv 023: Release 1.03 (27/02/2023)Nelson Piquet Souto Maior100% (1)
- Solutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaDocument81 pagesSolutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaANTONIO RODRIGUESNo ratings yet
- The Vertical Dimension in Prosthesis and Orthognathodontics PDFDocument380 pagesThe Vertical Dimension in Prosthesis and Orthognathodontics PDFPatri Meisaros100% (1)
- Lincoln-Sl1 Centro-Matic Injector PDFDocument5 pagesLincoln-Sl1 Centro-Matic Injector PDFTaufan Nanjaya100% (1)
- Problem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Document7 pagesProblem Set 1: 2.29 / 2.290 Numerical Fluid Mechanics - Spring 2021Aman JalanNo ratings yet
- C P - PH 354: Omputational HysicsDocument13 pagesC P - PH 354: Omputational HysicsAthira GopalNo ratings yet
- Possible Questions Exam Non-Equilibrium Statistical MechanicsDocument4 pagesPossible Questions Exam Non-Equilibrium Statistical MechanicsEgop3105No ratings yet
- S4H - 074 How To Approach Fit To Standard Analysis - CloudDocument44 pagesS4H - 074 How To Approach Fit To Standard Analysis - CloudRaymundo PiresNo ratings yet
- Artificial ViscosityDocument5 pagesArtificial ViscosityDanielNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Frac Coeff MC RevDocument25 pagesFrac Coeff MC Revأم الخير تافنيNo ratings yet
- Advection Eqn Is UnstableDocument9 pagesAdvection Eqn Is UnstableZakria ToorNo ratings yet
- Numerical Solution For Fokker-Planck Equations in AcceleratorsDocument3 pagesNumerical Solution For Fokker-Planck Equations in AcceleratorsyasmeenNo ratings yet
- SadikuDocument4 pagesSadikuFelipe LucenaNo ratings yet
- Finite DifferenceDocument9 pagesFinite DifferenceSiddra KhawarNo ratings yet
- M2an ParabolicDocument27 pagesM2an ParabolicMurali ReddyNo ratings yet
- Numerical Solutions of The Space-Time Fractional Advection-Dispersion EquationDocument14 pagesNumerical Solutions of The Space-Time Fractional Advection-Dispersion EquationNour AttiaNo ratings yet
- Practice - Questions - 2, System ScienceDocument3 pagesPractice - Questions - 2, System ScienceSONUNo ratings yet
- Analytical Solution For The Time-Fractional Telegraph EquationDocument14 pagesAnalytical Solution For The Time-Fractional Telegraph EquationhabibNo ratings yet
- Numerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeDocument9 pagesNumerical Solution of Bagley-Torvik Equation Using Chebyshev Wavelet Operational Matrix of Fractional DerivativeVe LopiNo ratings yet
- ClassnotesDocument118 pagesClassnotesfranklloyd1975No ratings yet
- Solving Differential Riccati Equations A NonlinearDocument20 pagesSolving Differential Riccati Equations A NonlinearCarlosNo ratings yet
- Some Fourier Theory For Time Series AnalysisDocument12 pagesSome Fourier Theory For Time Series AnalysisDaniela Guerrero PeñaNo ratings yet
- Compressive Wave ComputationDocument45 pagesCompressive Wave ComputationmrfintrNo ratings yet
- Discrete Maximal Regularity of Time-Stepping SchemDocument32 pagesDiscrete Maximal Regularity of Time-Stepping Schemأم الخير تافنيNo ratings yet
- Functional QF TDocument25 pagesFunctional QF TRandallHellVargasPradinettNo ratings yet
- Discrete and Continuous Dynamical Systems Volume 16, Number 1, September 2006Document18 pagesDiscrete and Continuous Dynamical Systems Volume 16, Number 1, September 2006vaNo ratings yet
- On The Backward Problem For Parabolic Equations With MemoryDocument19 pagesOn The Backward Problem For Parabolic Equations With MemorykamranNo ratings yet
- 10.2478 - Cmam 2001 0009Document13 pages10.2478 - Cmam 2001 0009kotavijaykiran.iitbNo ratings yet
- MM043-p-16 Solution To The SystemDocument9 pagesMM043-p-16 Solution To The SystemAlishba FatimaNo ratings yet
- 2203.10573 EushsbbjsjjsDocument57 pages2203.10573 EushsbbjsjjsTim HariggumNo ratings yet
- cfd1 Probs2Document4 pagescfd1 Probs2whateverNo ratings yet
- Iterative Methods of Richardson-Lucy-type For Image DeblurringDocument15 pagesIterative Methods of Richardson-Lucy-type For Image DeblurringhilmanmuntahaNo ratings yet
- A Brief Introduction To Nonlinear Vibrations: 1 General CommentsDocument20 pagesA Brief Introduction To Nonlinear Vibrations: 1 General CommentsMjNo ratings yet
- Linear AdvectionDocument6 pagesLinear AdvectionErol BicerNo ratings yet
- Assignment4-2023 For Numerical AnalysisDocument3 pagesAssignment4-2023 For Numerical AnalysisPratyush Kumar SinghNo ratings yet
- High-Order Time-Accurate Schemes For Singularly Perturbed Parabolic Convection-Diffusion Problems With Robin Boundary ConditionsDocument23 pagesHigh-Order Time-Accurate Schemes For Singularly Perturbed Parabolic Convection-Diffusion Problems With Robin Boundary ConditionsSultan GodanaNo ratings yet
- Multiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeDocument14 pagesMultiplicity of Periodic Solutions for Dynamic Li´ enard Equations with Delay and Singular ϕ-laplacian of Relativistic TypeGustavo BalNo ratings yet
- Higher-Codimension Bifurcations Caused by Delay: Rong YuanDocument15 pagesHigher-Codimension Bifurcations Caused by Delay: Rong YuanEva KaslikNo ratings yet
- Assignment Ex04Document3 pagesAssignment Ex04Melbin SibyNo ratings yet
- Notes Lauri Oksanen Inverse PbsDocument24 pagesNotes Lauri Oksanen Inverse PbsAlba García RuizNo ratings yet
- Article Title 1Document12 pagesArticle Title 1alipirkhedriNo ratings yet
- Quantum ExamplesDocument26 pagesQuantum ExamplesAbdalmoedAlaiashyNo ratings yet
- PDE Notes2Document50 pagesPDE Notes2MaheshNo ratings yet
- 1 Estimating Uncertainties and Propagation of Errors: Physics 326, Final ExamDocument4 pages1 Estimating Uncertainties and Propagation of Errors: Physics 326, Final ExamJack BotNo ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- MIT QM Chap 01 PDFDocument26 pagesMIT QM Chap 01 PDFSergio Aguilera ChecoNo ratings yet
- 10.1007@s00233 016 9812 yDocument21 pages10.1007@s00233 016 9812 yOumaima BouaoultaineNo ratings yet
- Clavero-Jorge2017 Article AFractionalStepMethodFor2DParaDocument18 pagesClavero-Jorge2017 Article AFractionalStepMethodFor2DParajoginder singhNo ratings yet
- Maintaining Coherence in Quantum Computers.Document13 pagesMaintaining Coherence in Quantum Computers.Jingkai JiaNo ratings yet
- Quantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsDocument5 pagesQuantum Physics I (8.04) Spring 2016 Assignment 4: AnnouncementsFabian M Vargas FontalvoNo ratings yet
- SF2521NPDE hmwk1-2Document5 pagesSF2521NPDE hmwk1-2BlooD LOVERNo ratings yet
- A New Modification in The Exponential Rational Function Method For Nonlinear Fractional Differential EquationsDocument11 pagesA New Modification in The Exponential Rational Function Method For Nonlinear Fractional Differential Equationspranaygoswami1983No ratings yet
- Simulation of Stopped DiffusionsDocument22 pagesSimulation of Stopped DiffusionssupermanvixNo ratings yet
- The Fractional Time Step ProcedureDocument8 pagesThe Fractional Time Step ProcedureSharathKumarNo ratings yet
- Acquisition and Analysis of Neural Data: Analytical Problem Set 1Document3 pagesAcquisition and Analysis of Neural Data: Analytical Problem Set 1PritamSenNo ratings yet
- Numerical Solution To The Van Der Pol Equation With Fractional DampingDocument5 pagesNumerical Solution To The Van Der Pol Equation With Fractional DampingLakshmi BarathiNo ratings yet
- 2023-2024 ProblemSetWeek3Document3 pages2023-2024 ProblemSetWeek3popbop67No ratings yet
- TrongDocument16 pagesTrongTrân TrọngNo ratings yet
- Hydrology 510 Quantitative Methods in Hydrology: MotiveDocument57 pagesHydrology 510 Quantitative Methods in Hydrology: MotiveybNo ratings yet
- Xu - Wave Approximation of Backward Heat Equation With Ricci FlowDocument34 pagesXu - Wave Approximation of Backward Heat Equation With Ricci Flowperson persinNo ratings yet
- MIT8 05F13 Chap 01 PDFDocument26 pagesMIT8 05F13 Chap 01 PDFKamilNo ratings yet
- Dispersion Estimates For Spherical Schrödinger Equations With Critical Angular MomentumDocument39 pagesDispersion Estimates For Spherical Schrödinger Equations With Critical Angular MomentumjhampiaNo ratings yet
- Exam 1Document6 pagesExam 1Umair KhanNo ratings yet
- 1985-1992 DSWA6328F Operations Charioteer EtcDocument494 pages1985-1992 DSWA6328F Operations Charioteer EtcDaniel TopaNo ratings yet
- EffectsDocument13 pagesEffectsDaniel TopaNo ratings yet
- Transparent Language English 6.0 Installation GuideDocument12 pagesTransparent Language English 6.0 Installation GuideDaniel TopaNo ratings yet
- Statistical Description of The Wave Front Aberration in The Human EyeDocument13 pagesStatistical Description of The Wave Front Aberration in The Human EyeDaniel TopaNo ratings yet
- Homotopy in The Zernike BasisDocument30 pagesHomotopy in The Zernike BasisDaniel TopaNo ratings yet
- PQR Amp WPQ Standard Testing Parameter WorksheetDocument4 pagesPQR Amp WPQ Standard Testing Parameter WorksheetvinodNo ratings yet
- 1osh LeadsDocument72 pages1osh Leadssaskiamogale100% (1)
- Reading Comprehension 2 (Teamwork & Competition)Document16 pagesReading Comprehension 2 (Teamwork & Competition)Ibtisam alanaziNo ratings yet
- HIVER Waivers sp22 Fady ElmessyDocument2 pagesHIVER Waivers sp22 Fady ElmessyFady Ezzat 1No ratings yet
- The World's First Free Tattoo and PiercingDocument34 pagesThe World's First Free Tattoo and Piercingapi-21988252No ratings yet
- List of Companies Having SAPDocument2 pagesList of Companies Having SAPKrushikeshNo ratings yet
- Db2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview QuestionsDocument21 pagesDb2 Interview QUESTIONS - Advertisement: Java Inteview Questions DB2 SQL Tutorial Mainframe Inteview Questionssroul4No ratings yet
- Aef2wb 34 35Document2 pagesAef2wb 34 35sigafile11No ratings yet
- 0.5ab Sin C 2018-03-19Document10 pages0.5ab Sin C 2018-03-19梁倬林No ratings yet
- Capd 000000144Document83 pagesCapd 000000144Capitol Breach DiscoveryNo ratings yet
- Rega Brio ManualDocument17 pagesRega Brio ManualjamocasNo ratings yet
- Proprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamageDocument2 pagesProprietary & Confidential: This Is A Static Sensitive Device. Handle & Store Appropriately To Prevent Esd DamagePawan PalNo ratings yet
- Microbial Physiology in The Genomic Era: A Revolutionary TaleDocument21 pagesMicrobial Physiology in The Genomic Era: A Revolutionary TaleLiona PatriciaNo ratings yet
- Gospel Steel TrussDocument18 pagesGospel Steel TrussJoseph Cloyd L. LamberteNo ratings yet
- Nutanix: NCP-MCI-5.15 ExamDocument7 pagesNutanix: NCP-MCI-5.15 ExamAlvin BosqueNo ratings yet
- Fourier OpticsDocument9 pagesFourier Opticssal.paradise.1No ratings yet
- Safety Data Sheet Kerosene: NfpaDocument9 pagesSafety Data Sheet Kerosene: NfpaAliNo ratings yet
- CV TemplatesDocument3 pagesCV TemplatesMd Shohag AliNo ratings yet
- English ReviewDocument5 pagesEnglish ReviewCherry PinoNo ratings yet
- 89C51 Instruction SetDocument49 pages89C51 Instruction SetYashaswini B Srinivas100% (1)
- Equity ApplicationDocument3 pagesEquity ApplicationanniesachdevNo ratings yet
- Cash Flow StatementDocument16 pagesCash Flow Statementrajesh337masssNo ratings yet
- Al Burj Al Thaki Warning & Control Devices TR: To: Federal Tax AuthorityDocument3 pagesAl Burj Al Thaki Warning & Control Devices TR: To: Federal Tax AuthorityAL BURJ AL THAKINo ratings yet
- Material Property Data For Engineering MaterialsDocument35 pagesMaterial Property Data For Engineering Materialspraving76No ratings yet
- Juhani Pallasmaa Complete MonographDocument52 pagesJuhani Pallasmaa Complete MonographYang Yu100% (1)
- Coldharbour/Wrotham Road GravesendDocument28 pagesColdharbour/Wrotham Road GravesendWessex ArchaeologyNo ratings yet